1、坐标系介绍
相机模型中,三维世界中的某一点 和 其对应的像素点是通过坐标系的转换得到的。这个过程中会涉及到四个坐标系,即世界坐标系、相机坐标系、图像坐标系、像素坐标系。下面将详细介绍四个坐标系的含义并且记录其的转换过程。这四个坐标系的转换实质就是刚体变换、透视投影和数字化图像这几个成像里的步骤。

图像中所涉及的四个坐标系及其含义:
Ow - Xw - Yw - Zw :世界坐标系,单位为 m。
Oc - Xc Yc Zc : 相机坐标系,光心为原点,单位为m
o - x y : 图像坐标系,光心为原点,单位为mm
u v :像素坐标系,原点为图像左上角,单位 pixel
P :大P,世界坐标系中的一点,即为生活中真实的一点。
p :小p,大P在图像中的成像点,在图像坐标系中的坐标为(x,y),在像素坐标系中的坐标为(u,v);
f :相机焦距,等于 o 与 Oc 之间的距离。(此处以小孔成像为例,o-xy 为虚成像,由左边成像想等到右边,方便计算)
2、坐标系之间的相互转换
1)世界坐标系到相机坐标系
世界坐标系到相机坐标系包括了旋转和平移,(刚体变换)首先介绍旋转过程。下图为世界坐标系绕z轴旋转模型:



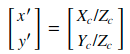
2)相机坐标系到图像坐标系
相机坐标系到图像坐标系满足小孔成像模型,通过简单的相似三角形原理即可得到:从相机坐标系到图像坐标系,是从3D转换到2D,属于透视投影关系

3)图像坐标系到像素坐标系
由于图像坐标系和像素坐标系处于同一平面,故两者之间的差异在于坐标原点的位置和单位。像素坐标系的原点在图像坐标系的左上角,同时像素坐标系的单位为像素。

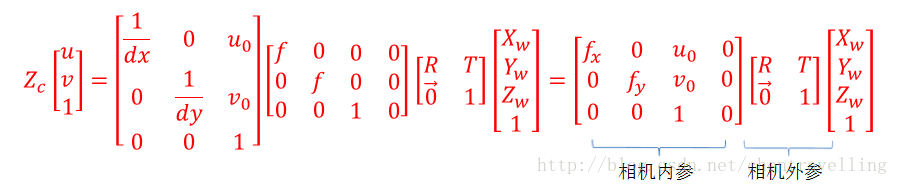
4)综合
至此,四个坐标系之间的变换关系已知,即可求得世界坐标系到像素坐标系的关系:

参考:OpenCV学习之世界坐标系、相机坐标系、图像坐标系和像素坐标系之间的转换关系_xueluowutong的博客-CSDN博客_相机坐标系
相机模型中四个坐标系的关系 - 知乎 (zhihu.com)
世界坐标系和相机坐标系,图像坐标系的关系_waeceo的专栏-CSDN博客_相机坐标系
相机内参和外参 - 知乎 (zhihu.com)