题目:压缩感知应用——单像素相机
============================================================
参考文献:
1)Rachel Zhang的专栏,压缩感知进阶——有关稀疏矩阵:http://blog.csdn.net/abcjennifer/article/details/7748833
2)白凌云,梁志毅,徐志军. 基于压缩感知理论的单像素成像系统研究. 计算机工程与应用,2011,47(33):116-119.
3)陈 涛,李正炜,王建立,王 斌,郭 爽. 应用压缩传感理论的单像素相机成像系统. 光学精密工程,2012,20(11):2523-2530.
============================================================
一、单像素相机介绍
学习研究压缩感知理论,肯定得听说rice大学的单像素相机,而理解一个典型压缩感知系统的组成,从单像素相机入手也不失为一种选择,所以我也学习一下。
过多的文字叙述不再重复,直接从三个参考文献中选取一些有代表性的文字及图片即可:
文献2:
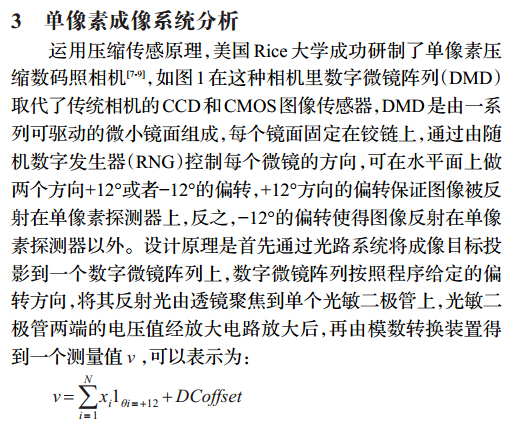
文献3:
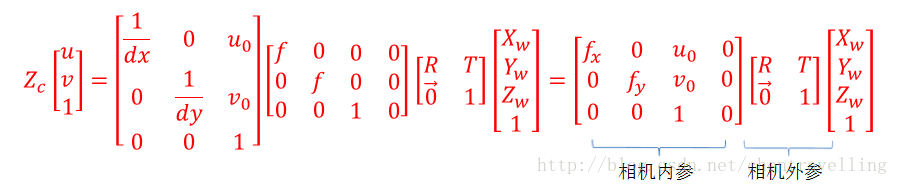
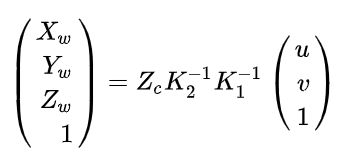
文献1:(个人感觉两张很经典的图片)

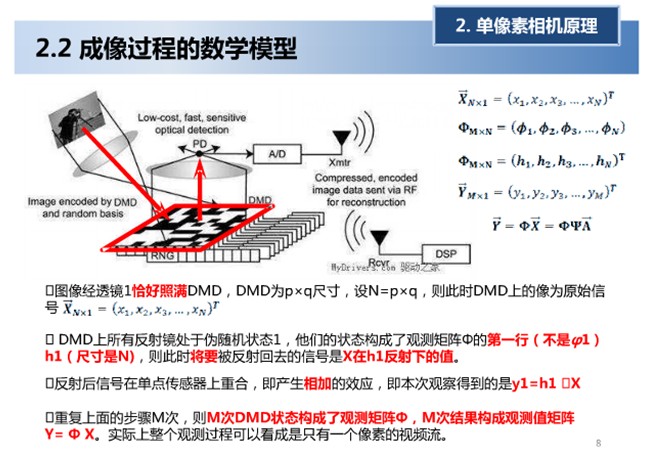
看了文献2和文献3两部分后基本就会对单像素相机的原理有所了解了,而文献1的两张图片尤其是第二张(2.2成像过程的数学模型)描述最为清晰。
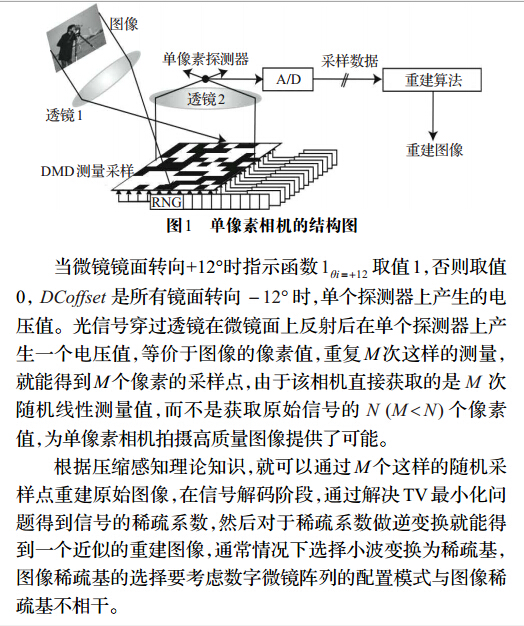
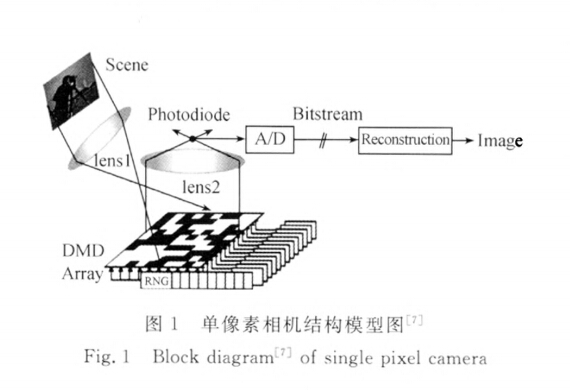
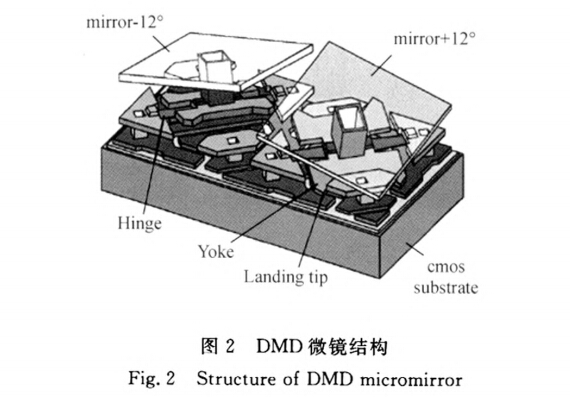
当图片经过透镜1恰好照满到DMD上时,其中DMD由N个如文献3图2(包括两个)中的微镜结构,相当于将图片转换成一个N维信号X,我们要对信号通过Φ进行一个压缩观测,由N维的信号X得到一个M维的观测信号Y,我们是通过操纵DMD共M次得到M个值,DMD的M次状态分别构成Φ的M行,通过M次观测即完成Y=ΦX整个过程。
单像素相机的基本原理就是这么简单,至于内部深层次的理论问题比如Φ是否满足RIP性质等等可以去看看参考文献2和文献3.
============================================================
二、几个问题
在这里我有几个问题:
1、几乎所有的压缩感知文献中都会提到压缩感知是突破Nquist采样定理的限制,单像素相机里不需要考虑采样定理么?
2、压缩感知理论基于信号可以稀疏表示,在文献中一般都会说信号X可以在稀疏基Ψ中稀疏表示,而单像素相机中的Ψ体现在哪里?
在文献1的评论里也有网友提出了这个问题:
3、我们在压缩感知的文献中信号X都是做为离散信号处理的,Y=ΦX完成压缩采样,如果是模拟信号怎么办呢?
【jbb0523博主的理解】
1、个人感觉,这里我们忽略了一点,我们现在面对的信号是一幅静止的图片,你的M次观测花多长时间,而对的始终是这幅图片(是不是可以这样理解,不管你观测还是不观测,图片就在那里,不增不减),所以你可以从容的完成对图片的M次观测(或者可以理解成采样),但如果这里不是一幅静态的图片而是一个视频呢?你是不是就要考虑对视频的每一帧要完成M次采样,所以要在每一帧图像变化前(设每一帧持续时间为T)完成这M次采样,这是不是也算是采样率的概念呢?即在时间T内完成M次观测(或者说是采M个点,当然这个采样和普通意义上的采样并不一样),不知道个人的理解是否偏离有单像素相机的出发点,个人感觉你用相机拍照时景色也并不是静止的啊。
参考文献1 的评论中第23楼网友horrorfrog 提到“cs没有否定奈奎斯特采样定理,只不过cs是以信号的稀疏性为先验知识,奈奎斯特采样定理是以信号带宽为先验知识。”
2、博主Rachel Zhang(abcjennifer)在对26楼的回复中说“反射镜处于伪随机状态,可以完成稀疏采样”,这里反射镜处于伪随机状态等价来说就是Φ是一个伪随机矩阵,根据压缩感知的相关知识我们知道,稀疏基Ψ要与观测矩阵Φ不相关,所以观测矩阵Φ我们经常采样高斯随机矩阵来担当(比如在Rachel Zhang的压缩感知Helloworld程序中就是令观测矩阵Phi=randn(M,N);,这是一个M*N的一个高斯白噪声矩阵,即高斯随机矩阵吧),那么稀疏基Ψ在哪里呢?这个在实际中我们认为信号X可以在稀疏基Ψ上稀疏表示,当然对于不同种类的信号,能最稀疏表示它的稀疏基Ψ是不同的,例如在Rachel Zhang的压缩感知Helloworld程序稀疏基是用傅里叶变换基(Psi=fft(eye(N,N))/sqrt(N);),而在看过的一篇文献(张颖超,茅丹,胡凯. 压缩传感理论在心电图信号恢复问题上的研究. 计算机研究发展,2014,51(5):1018-1027)中就是在研究不同类别的心电信号在不同小波基上稀疏表示的情况,比较恢复的效果。
也就是说在单像素相机中,我们已为图片找好了稀疏基Ψ,然后在观测时保证观测矩阵Φ与稀疏基Ψ不相关即可。在这个系统里没有直观的体现出稀疏基Ψ,但在恢复算法里会使用稀疏基Ψ,当然你可以尝试不同的稀疏基Ψ去观查哪一个稀疏基的效果更好,不同的信号最合适的稀疏基Ψ也是不同的。
3、其实单相素像机中的图片就是一个模拟信号,只是经过DMD把它分成了N个值即N维信号X,然后Y=ΦX完成压缩观测得到M维信号Y(得到的值还是一个模拟值,不过这里的模拟值就是另一个概念了,即Y中的每一个元素值)。这里深究的话应该就是AIC(Analog to Information Converter,模拟信息采样)的概念了吧(具体AIC怎么实现还没有细看,今天下载了六七篇文献打算在未来几天看一下,单像素相机中由实际的图片得到M维的观测值Y是不是一个AIC的概念呢?),如果非要AD采样得到N维的信号X再压缩观测得到M维的Y意义何在呢?相当于说高成本的ADC已经使用,然后在接收端还得经过复杂的重建算法,好折腾的感觉,这和压缩感知的初衷就背离了吧,好多文献中都会说普通的压缩系统是先采样再压缩,而压缩感知是边采样边压缩………
以上就是个人的几点理解,后续有了深入的理解再发文,争取未来几天弄懂AIC的基本原理……
感慨:在沙威大牛的“压缩传感”引论中提到,他用了一周的时间阅读文献、思考问题、编程序、直到写出“压缩传感”引论,真心感觉人和人之间的差别怎么就那么大呢?我都看了好几个一周了,单单消化Rachel Zhang(abcjennifer)引用其程序作为Helloworld那篇博文就不止花了一个星期而且感觉还没消化彻底,哎,只能多多努力了,应该是要更加更加的努力……