matlab 做相机标定后,想将第一张(任意一张都行)标定板角点所对应的像素坐标转换到世界坐标系下,标定板角点的像素坐标真值与世界坐标真值都非常容易获得,但是我通过内外参矩阵将像素坐标转换到世界坐标有很大的误差,如下
close all;
clear all;
clc;
load ('6mm_matlab.mat')
% 相机标定基本参数
M = cameraParams.IntrinsicMatrix';
R = cameraParams.RotationMatrices(:,:,1);
T = cameraParams.TranslationVectors(1,:)';
UV = cameraParams.ReprojectedPoints(:,:,1);
% 将标定板角点像素坐标转换成齐次
for i = 1:size(UV,1)UV_H(i,:) = [UV(i,:),1];
end
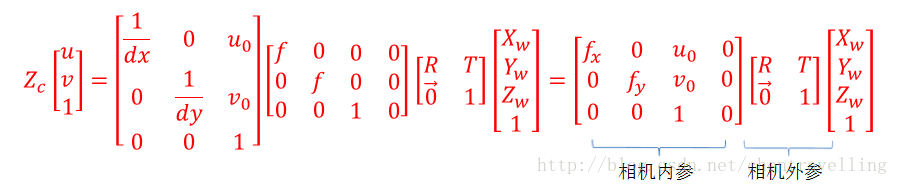
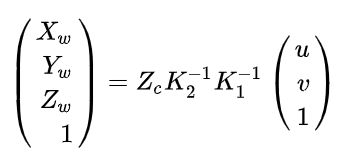
% 将像素坐标系转换到像素坐标系,公式参考: https://blog.csdn.net/qq_43222384/article/details/101516807
leftMatrix = inv(R)*inv(M)*UV_H';
rightMatrix = inv(R)*T;
rightMatrix_H = repmat(rightMatrix(3),[1,size(UV,1)]);
temp_s = rightMatrix_H./leftMatrix(3,:);
N_rightMatrix = repmat(rightMatrix,1,size(UV,1));
CB_World = temp_s.*leftMatrix - N_rightMatrix;像素坐标到世界坐标之间的转换可参考如下公式
已知像素坐标,世界坐标
,内参矩阵 M,旋转矩阵 R,平移向量 T。
则有:
记,
解得
所以
Matlab 标定后的相机参数如下:

内参矩阵:,旋转矩阵:
,
平移向量:
世界坐标系下的点到像素坐标系下的转化关系可表示为:
标定板的间距为10mm,随意带两个世界坐标系下的点(0,0)和(0,10)
算出来得结果分别为,
计算结果和真值的误差较大,在世界坐标系下的Y轴上的角点应该接近 0 实际上Y轴上的值逐渐增大,可以观察下面的计算结果
世界坐标系下的真值为:

通过上述公式计算得到的世界坐标结果:

我标定的重投影误差再0.04以内,其它各个参数也符合,为什么数据的误差会这么大呢?而且这个数据变化也有一定的规律,这是怎么回事呢?
相机标定图像
链接:百度网盘 请输入提取码
提取码:john
已解决:matlab做相机标定,内参矩阵与旋转矩阵都需要做转置后才能使用