首页
编程日记
开发工具
嵌入式
服务器
运维
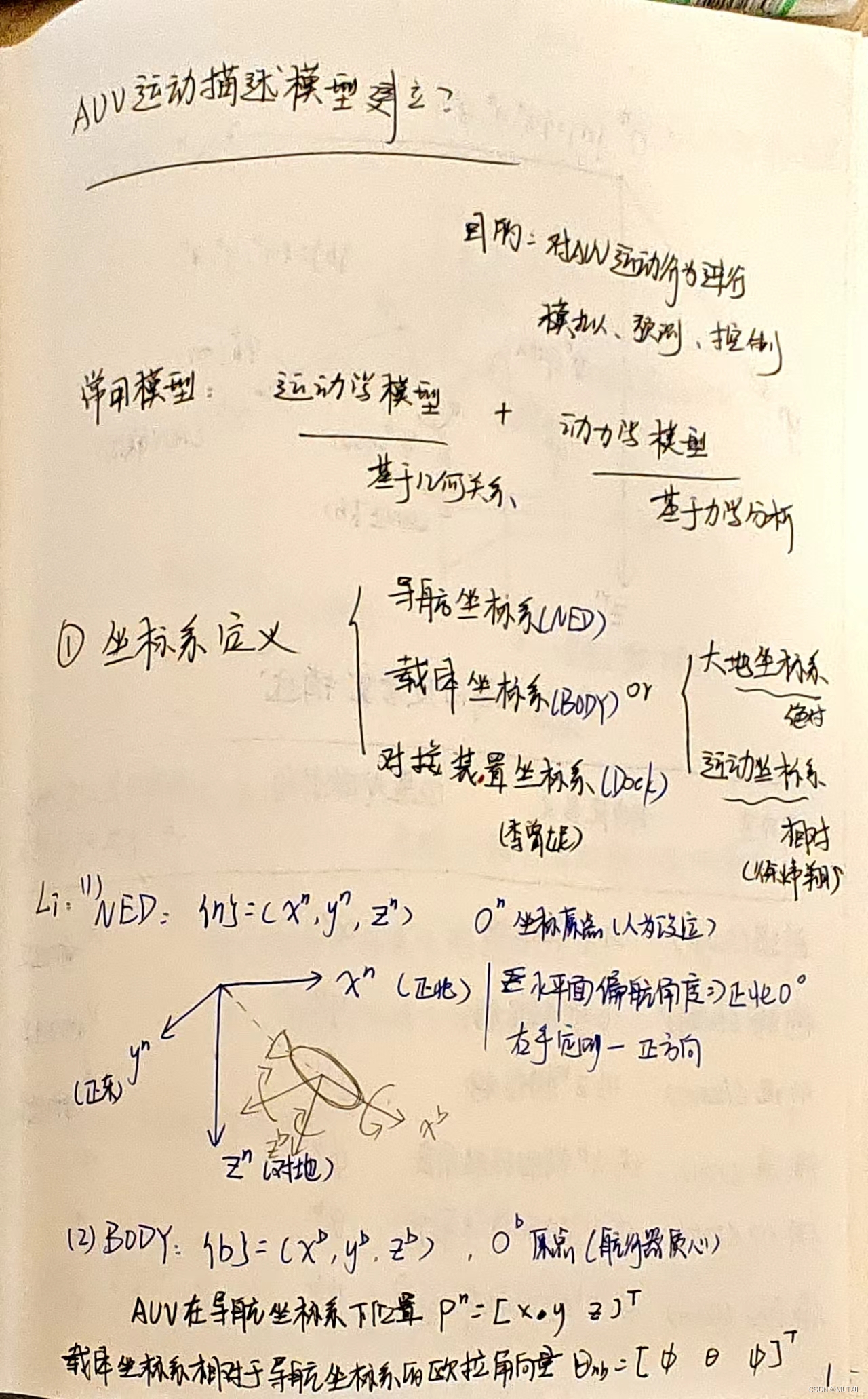
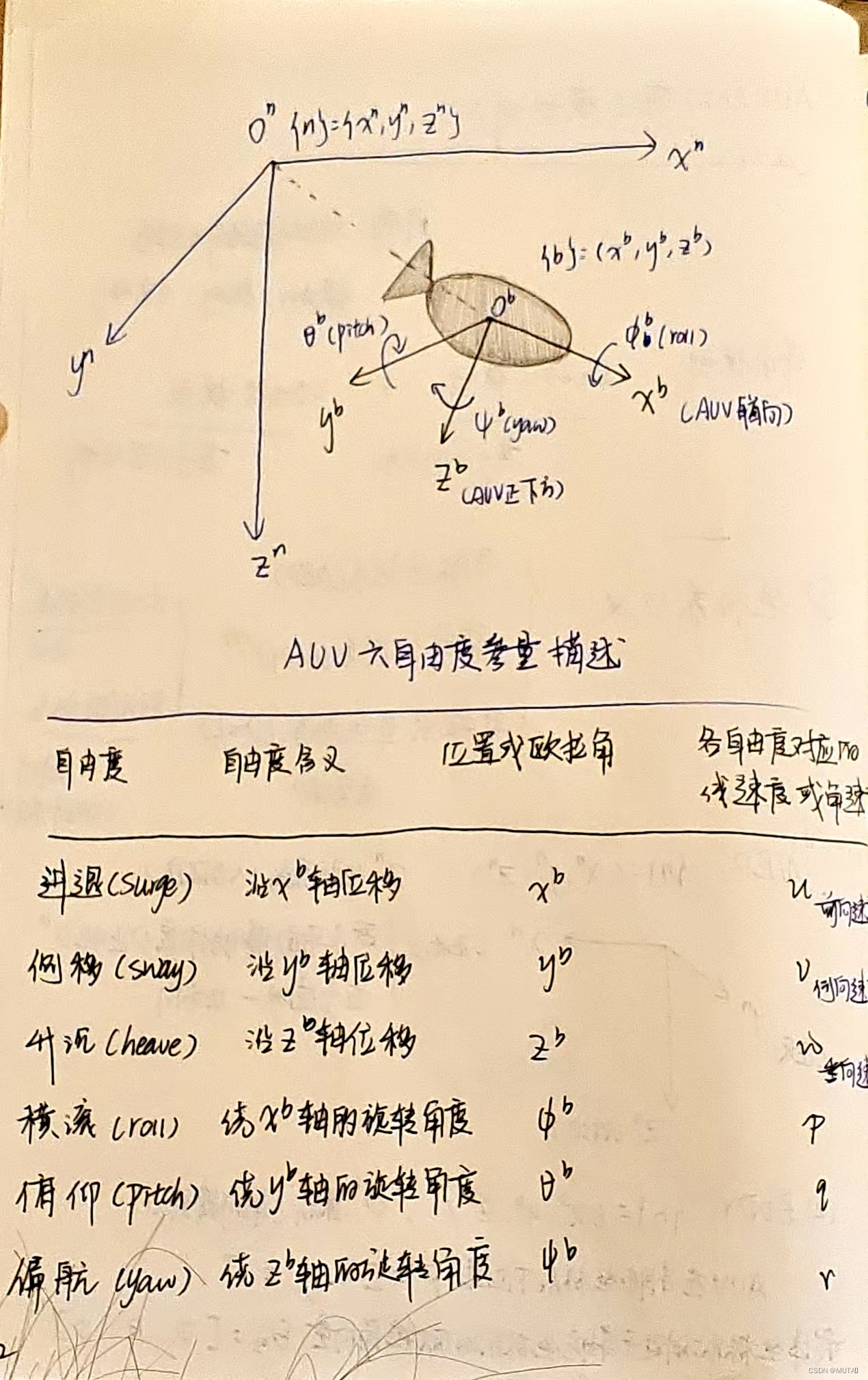
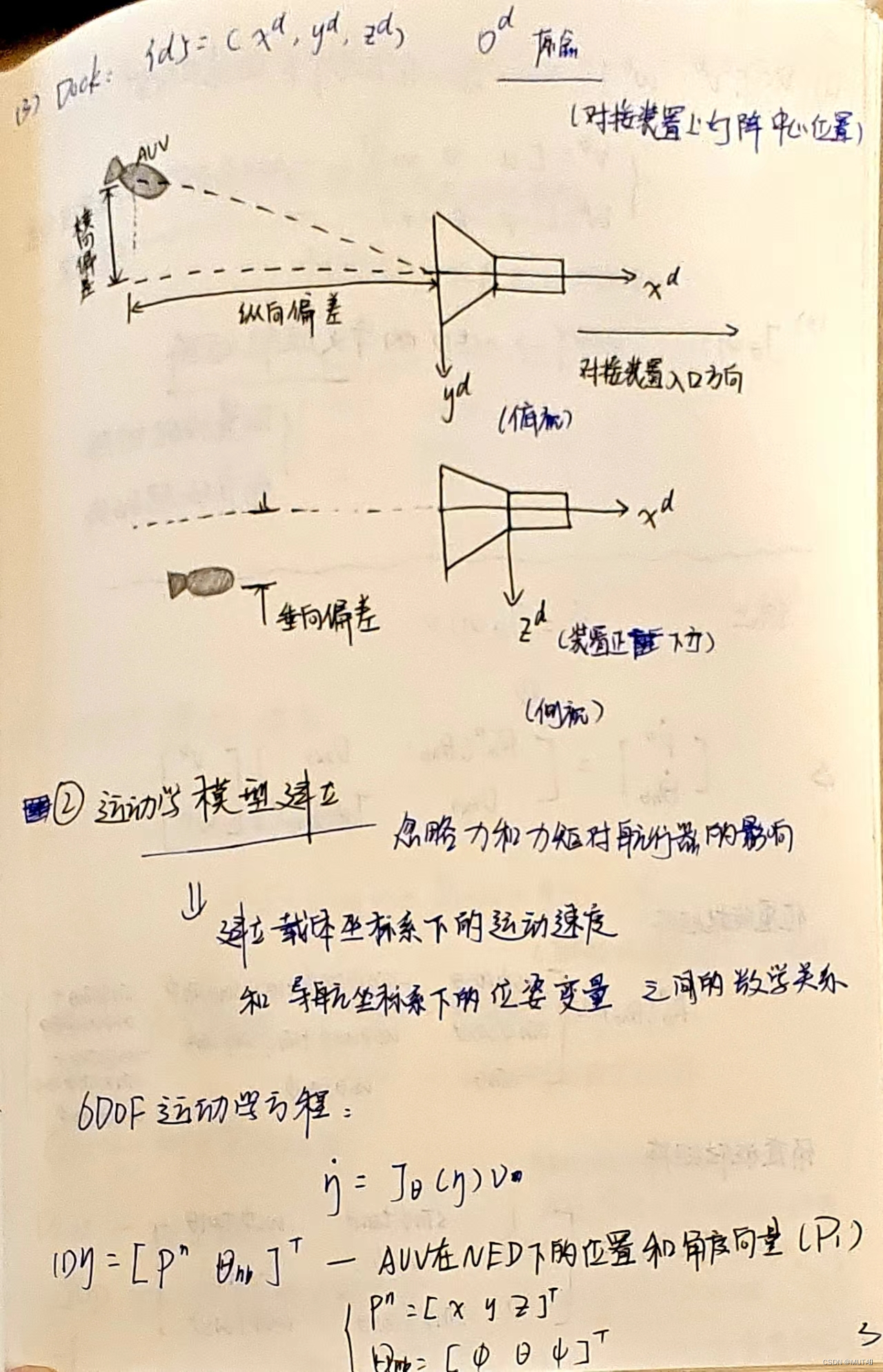
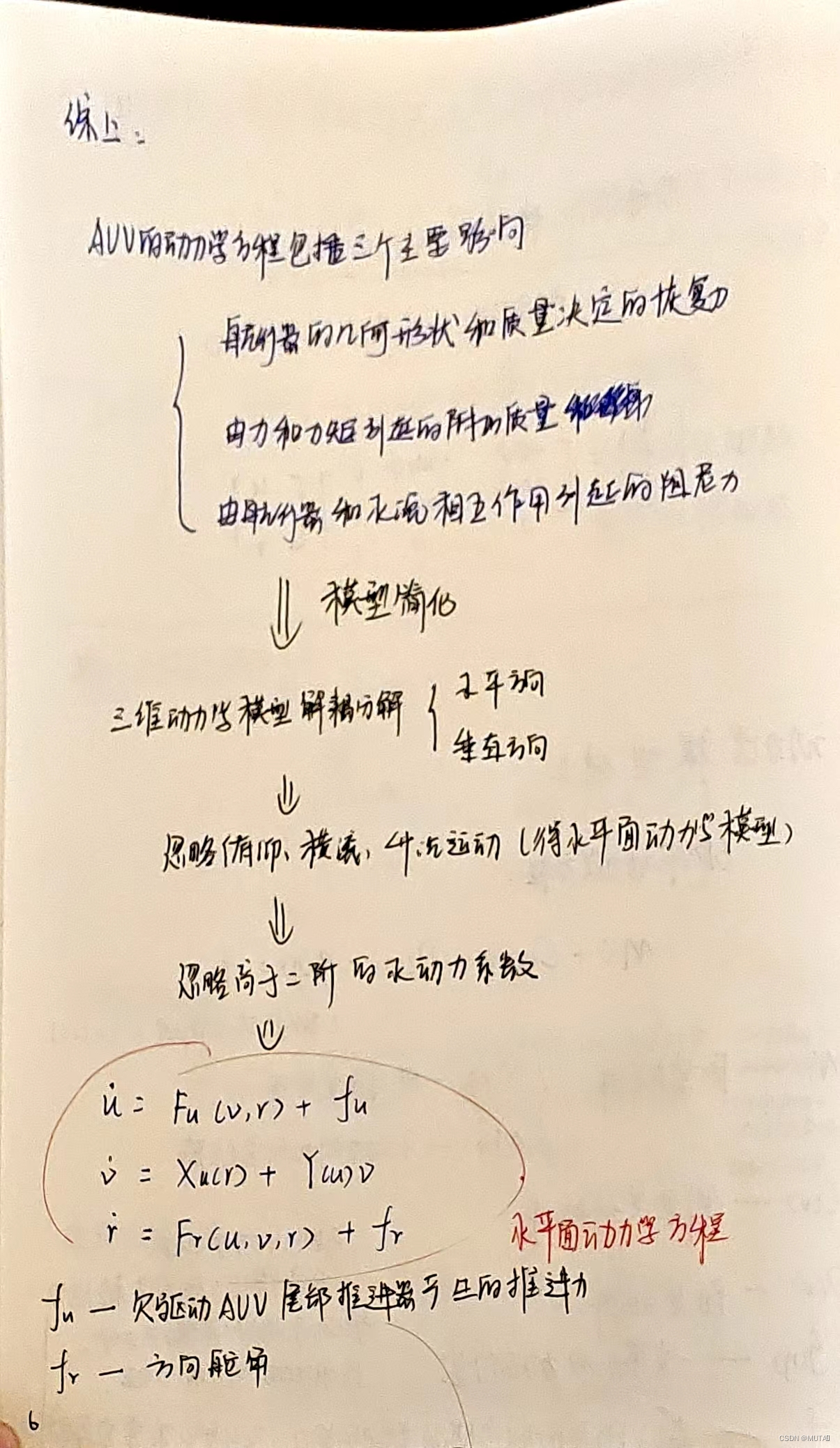
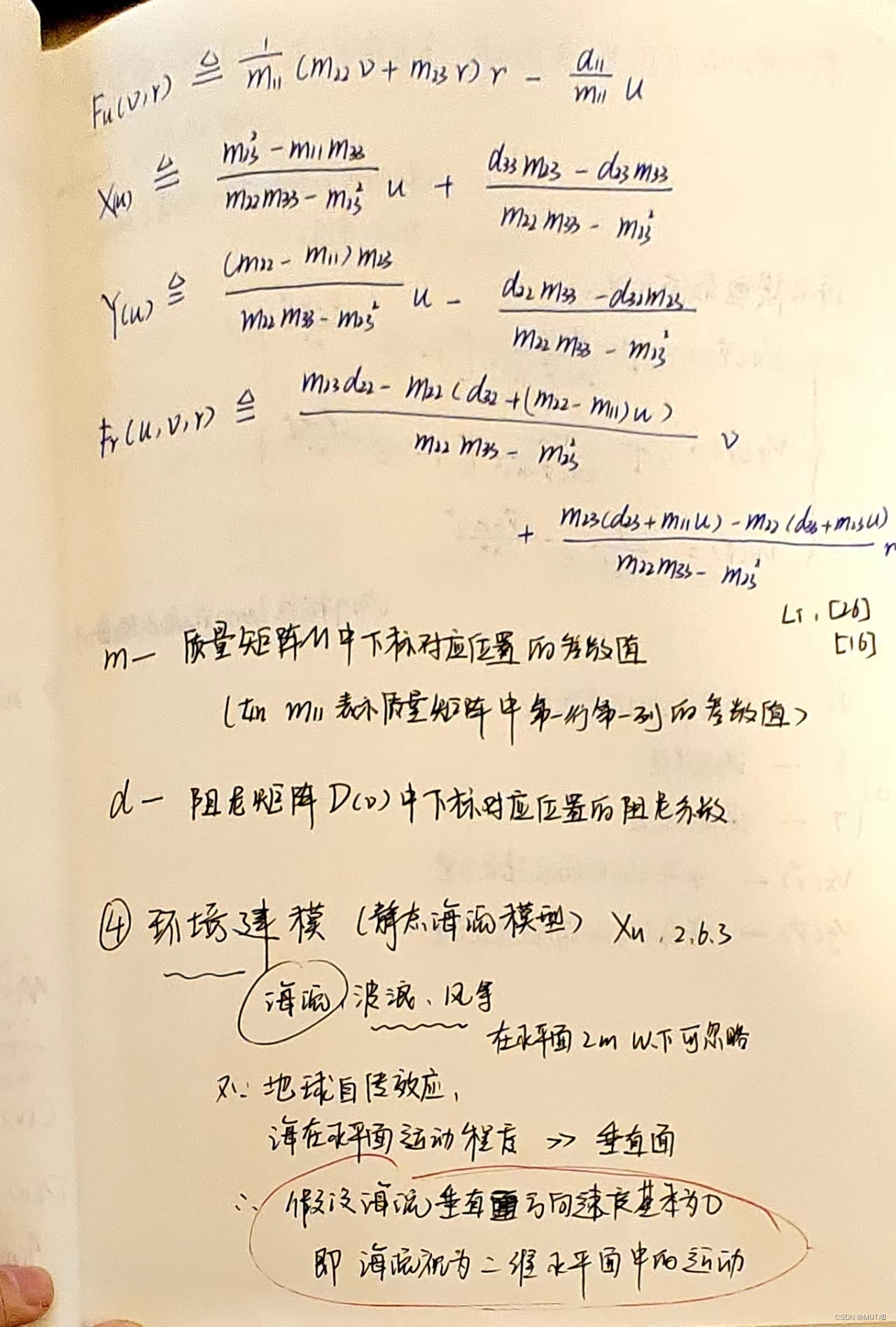
AUV运动描述模型建立(1)
news
/
2024/11/19 22:53:51
/
参考文献:
李曾妮. 移动对接过程中的欠驱动AUV路径规划方法研究[D].浙江大学2022.
徐炜翔. 面向水下自主航行器回收的路径规划研究[D].江苏科技大学.
http://www.ppmy.cn/news/835023.html
相关文章
AUV直线路径跟踪仿真-反步滑模方法
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 文章目录 前言 一、整体思路 二、控制器设计 1.纵向推力-反步法 2.转艏力矩-滑模方法 三、虚拟AUV速度推算 四、仿真实现 1.艏向制导误差和滑模面函数 2.控…
阅读更多...
AUV路径跟踪视线法(Line Of Sight)制导原理
文章目录 前言一、趋近角的表达式二、水平面趋近角原理三、趋近角选择优势 前言 针对路径跟踪问题,为调整 AUV 趋向且收敛至期望路径,本文对视线角(Line Of Sight)导航的方法原理进行介绍。 就水平面视线法原理进行具体介绍,垂直面上与之类似…
阅读更多...
AUV运动控制仿真(PID控制)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 目录 前言 一、研究对象描述 二、总体思路 三、仿真实现 1.获得误差 2.设计PD控制器 3.控制力传入模型进行解算 4.通过艏向角速度得到艏向角 5.Solver设置 四、仿真结果分析 …
阅读更多...
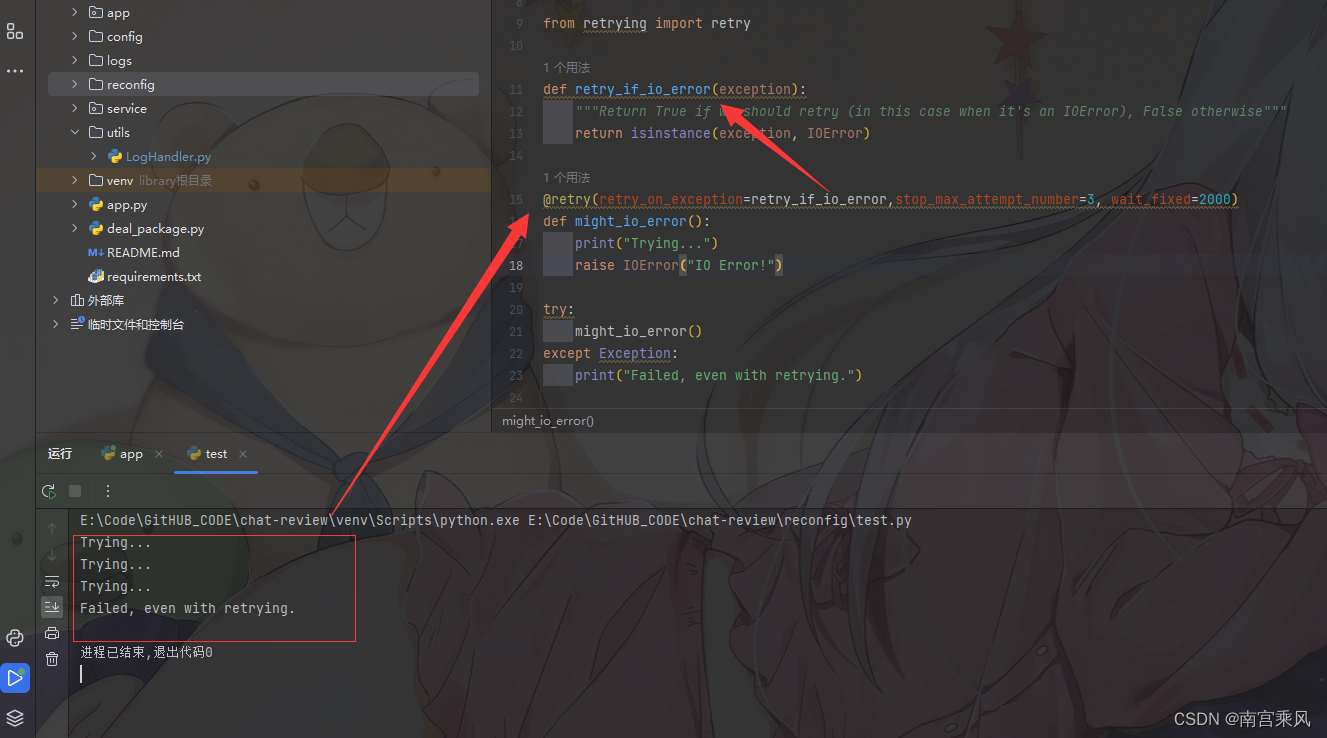
Python错误处理的艺术:使用retrying库实现高效重试机制
简介 学习如何使用 Python 的 retrying 库来处理在程序运行过程中可能出现的各种异常和错误。 retrying 是一种简单、易于使用的重试机制,帮助我们处理由网络问题或其他暂时性错误引起的失败。在很多情况下,简单的重试可能就是解决问题的最好方式。通过…
阅读更多...
auv的设计
auv的设计: 带机翼的auv多种auv造型轴封,是水下推进的重要技术有刷电机好像功率更大。参见这里写链接内容提到的电机。水下推进器 的设计。无刷不怕水,外转子转矩大。故无刷外转子电机可以作为水下推进器,另外,由于外…
阅读更多...
AUV 配置过程
此文章写在装好ROS的基础上 系统:Ubuntu18 ros:melodic 创建项目 mkdir -p ~/catkin_ws/srccd ~/catkin_ws/srccatkin_init_workspacecd ..catkin_makesource ~/catkin_ws/devel/setup.bash更改bashrc terminal里跑 gedit ~/.bashrc添加: source /…
阅读更多...
滑模方法设计AUV路径跟踪转艏力矩
文章目录 前言一、滑模控制的基本原理介绍二、几种典型的趋近率2.1等速趋近率2.2指数趋近率2.3幂次趋近率2.4一般趋近率 三、滑模方法设计转艏力矩 前言 本文通过滑模方法对AUV的直线路径跟踪的转艏力矩进行设计,主要目的是介绍滑模变结构控制的基本原理和滑模方法…
阅读更多...
AUV控制中的反步法
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 目录 前言 一、问题描述 二、反步法的简单介绍 三、AUV中的反步法 1.纵向速度 2.艏向角 前言 本文简单介绍AUV控制中常见反步法的使用。 提示:以下是本篇文章…
阅读更多...
最新文章
Spring Security 认证
外包干了2个月,技术明显退步
SpringBoot(二十三)SpringBoot集成JWT
Javaweb-day13事务管理AOP
动手学深度学习69 BERT预训练
前端项目接入单元测试手册