auv的设计:
- 带机翼的auv


- 多种auv造型

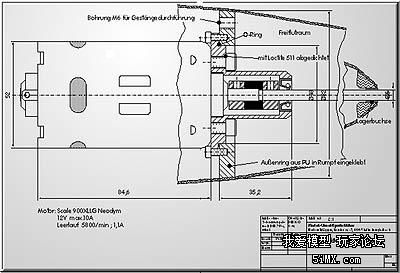
- 轴封,是水下推进的重要技术
- 有刷电机好像功率更大。参见这里写链接内容提到的电机。
- 水下推进器 的设计。
- 无刷不怕水,外转子转矩大。故无刷外转子电机可以作为水下推进器,另外,由于外壳转动,因此可以将外壳里面做的很光滑以消除阻力。在视频这里写链接内容中提到在壳里面充油,可以减少腐蚀。
- 子弹头桨夹,安装架

- 一种推进器布局,可以实现多小推力集成为大推力

- 洛克希德·马丁公司的Marlin自主式水下航行器(AUV

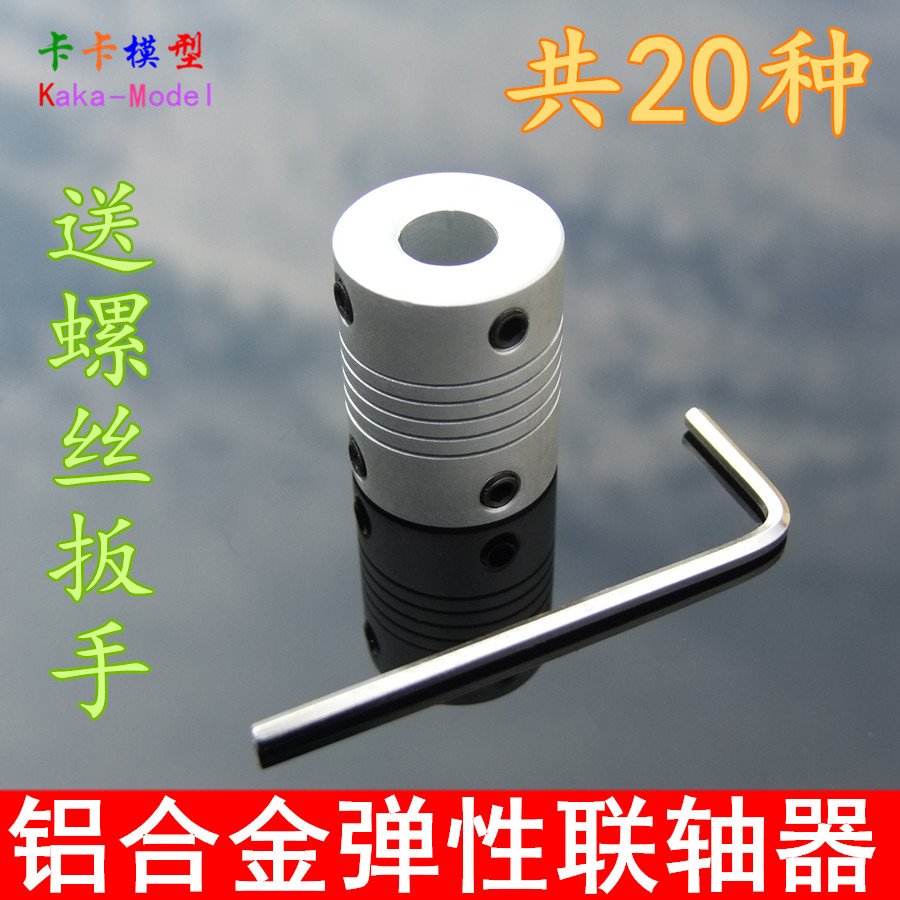
- 弹性联轴器
- 万向节 联轴器

伞齿轮传动

15.一个描述openrov安装过程的中文帖子这里写链接内容深水电机
- WiFi浮标
- 光轴+光轴座 (从丝杠得到启发),进行舵机输出轴的水密。光轴套
- 电机采用防水电机。
- 集装式机械密封

- 夹紧式绕线联轴器,优点,零回转间隙。

- 往复舵机
- 舵机防水,方法之一,拆开电路板涂704。 舵机臂 下面齿轮涂黄油。好像用704处理防水问题比较普遍。

拉杆总成
- 固定翼 拉杆 总成,加上风琴套,或者防水舵机(黄油+704),也可以构成一套简便的水下舵机结构。
关于防水
- 凡士林(取代黄油,因为黄油遇水会有乳化的问题发生),这个我没有试过。可以一试。参见链接这里写链接内容
- 道康宁 3140防水胶,针对电路的。涂于电路上。
- 国内也有用704和705防水胶的,704白色黑色都有,705好像是透明的,3140防水胶也是透明的。
潜艇模型
- 论坛5imx论坛潜艇专区,这里写链接内容
- 基本方案:防水无刷电机
- 遥控频率:2.4G的控玩潜艇,保证可以让你满载而去,空手提控回家。
35MHZ,40MHZ,72MHZ的都可以使用,没有太大区别。 - 防水关键是:风琴套总成

- 水下密封的经验贴:这里写链接内容
- 12.
结构
牙杆,丝杠,丝杆区别,丝杆与丝杠只是通常的叫法不同,其实都是指机床中的传动件。
我最喜欢的建造视频
这里写链接内容
遥控
2.4g馈线太短,需要延长,采用木马方式控制。
可以通过加功放来增程。
好像还有馈管。
连线,以APM飞控四旋翼为例: