LQR
2024/10/18 12:29:34
自动驾驶---Control之LQR控制
1 前言 在前面的系列博客文章中为读者阐述了很多规划相关的知识(可参考下面专栏),本篇博客带领读者朋友们了解控制相关的知识,后续仍会撰写规控相关文档。 在控制理论的发展过程中,人们逐渐认识到对于线性动态系统的控…

平衡小车的控制算法--结合自动控制原理学习
单纯的去看自控原理,很多概念有点抽象,最好找些应用去理解相关的概念,就找了实验室的一个平衡小车作为应用,不过主要根据小车去跑matlab去验证一些控制算法。结合台湾国立交通大学林沛群的自控线上课的总结 一、自控原理重要概念 …

基于LQR算法的机器人轨迹跟踪控制详解
本文摘要 本文详细介绍了基于线性二次型调节器(LQR)算法的机器人轨迹跟踪控制方法。首先,文章通过建立基于运动学模型的离散状态方程,来描述机器人的当前状态与目标状态之间的关系,并利用此模型进行状态误差的计算。接…
差速机器人模型LQR 控制仿真(c++ opencv显示)
1 差速机器人状态方程构建
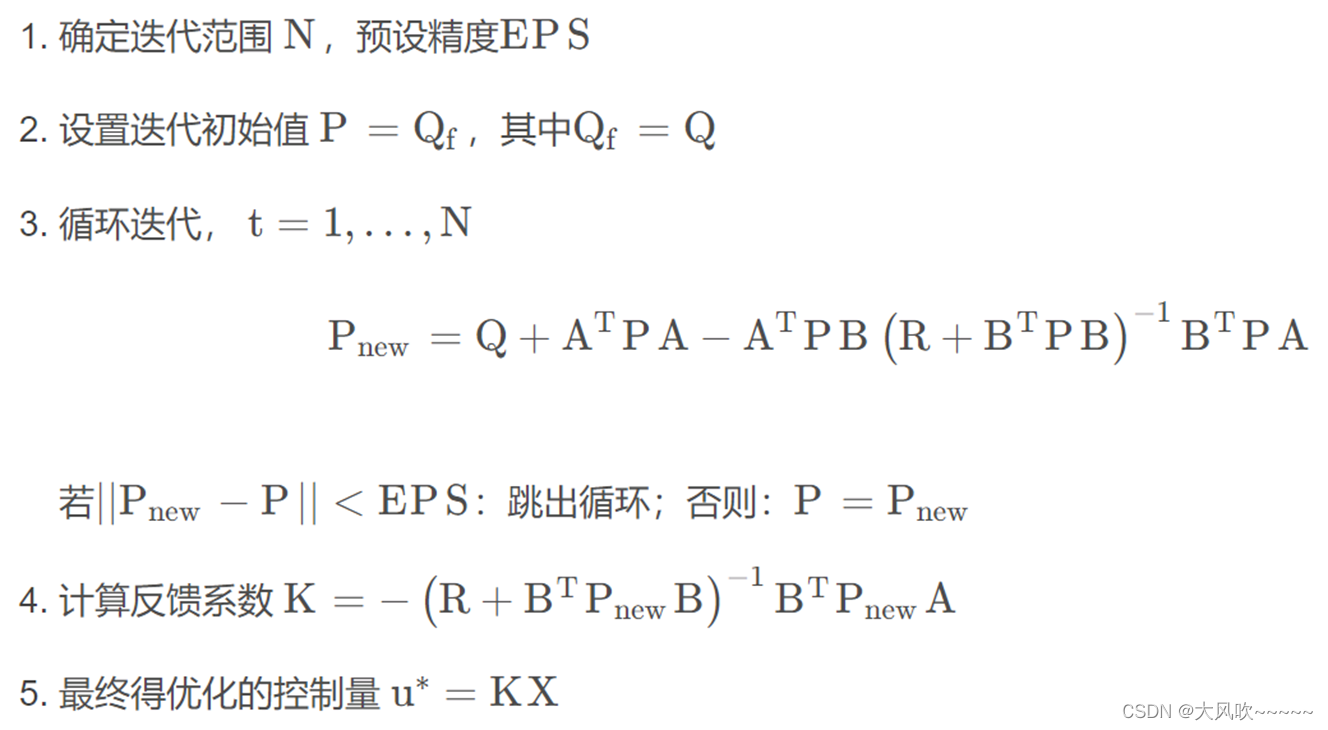
1.1差速机器人运动学模型 1.2模型线性化 1.3模型离散化 2离散LQR迭代计算 注意1:P值的初值为Q。见链接中的: 注意2:Q, R参数调节 注意3:LQR一般只做横向控制,不做纵向控制。LQR输出的速度…
差速机器人模型LQR 控制仿真(c++ opencv显示)
1 差速机器人状态方程构建
1.1差速机器人运动学模型 1.2模型线性化 1.3模型离散化 2离散LQR迭代计算 注意1:P值的初值为Q。见链接中的: 注意2:Q, R参数调节 注意3:LQR一般只做横向控制,不做纵向控制。LQR输出的速度…
面向阿克曼移动机器人(自行车模型)的LQR(最优二次型调节器)路径跟踪方法
线性二次调节器(Linear Quadratic Regulator,LQR)是针对线性系统的最优控制方法。LQR 方法标准的求解体系是在考虑到损耗尽可能小的情况下, 以尽量小的代价平衡其他状态分量。一般情况下,线性系统在LQR 控制方法中用状态空间方程描…
平衡小车的控制算法--结合自动控制原理学习
单纯的去看自控原理,很多概念有点抽象,最好找些应用去理解相关的概念,就找了实验室的一个平衡小车作为应用,不过主要根据小车去跑matlab去验证一些控制算法。结合台湾国立交通大学林沛群的自控线上课的总结 一、自控原理重要概念 …
平衡小车的控制算法--结合自动控制原理学习
单纯的去看自控原理,很多概念有点抽象,最好找些应用去理解相关的概念,就找了实验室的一个平衡小车作为应用,不过主要根据小车去跑matlab去验证一些控制算法。结合台湾国立交通大学林沛群的自控线上课的总结 一、自控原理重要概念 …

【自动驾驶】控制算法(五)连续方程离散化与离散LQR原理
写在前面: 🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落。📝 个人主页:清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。 🔍 本文系 清流君 原创之作&…
差速机器人模型LQR 控制仿真(c++ opencv显示)
1 差速机器人状态方程构建
1.1差速机器人运动学模型 1.2模型线性化 1.3模型离散化 2离散LQR迭代计算 注意1:P值的初值为Q。见链接中的: 注意2:Q, R参数调节 注意3:LQR一般只做横向控制,不做纵向控制。LQR输出的速度…

2-91基于matlab的LQR倒立摆控制仿真
基于matlab的LQR倒立摆控制仿真。对于xAxBu 和yCxdu标准方程,文件qiuk中用LQR函数求解控制数组K,将K值带入fangzhen文件中(文件中已代入),得到倒立摆稳定曲线。程序已调通,可直接运行。
下载源程序请点链接…
差速机器人模型LQR 控制仿真(c++ opencv显示)
1 差速机器人状态方程构建
1.1差速机器人运动学模型 1.2模型线性化 1.3模型离散化 2离散LQR迭代计算 注意1:P值的初值为Q。见链接中的:
2-91基于matlab的LQR倒立摆控制仿真
基于matlab的LQR倒立摆控制仿真。对于xAxBu 和yCxdu标准方程,文件qiuk中用LQR函数求解控制数组K,将K值带入fangzhen文件中(文件中已代入),得到倒立摆稳定曲线。程序已调通,可直接运行。
下载源程序请点链接…