

相关文章

STM32平衡车-MPU6050的DMP库移植
本文目录 一、硬件接线二、需要移植的三个文件夹1. DMP文件夹目录2. IIC文件夹目录3. MPU6050文件夹目录 三、文件内容IO12C.cIO12C.hMPU6050.cMPU6050.hmain.c 四、附录1.更改IIC引脚 一、硬件接线
SCL-- PA11 SDA-- PA12 VCC-- 3.3v GND-- GND INT-- PC9
二、需要移植的三个…

docker安装的es配置密码认证
docker安装的es配置密码认证
前言
今天客户提出来,说es的端口是暴露出来的,可以直接取出来数据,按照要求,必须对9200进行密码配置。准备好几种方案,nginx的反向代理加上认证配置(但是是一个单体的服务…
C++中rand()函数和随机数种子
C中rand()函数的用法 rand() % (b-a1) a ; 就表示 a~b 之间的一个随机整数。 表达式 int num rand() % 100 1; 产生的是1到100之间的随机数,而不是1到99。
rand() % 100 会产生一个从0到99的随机数,因为 % 是取模运算符,它会给出 rand() …
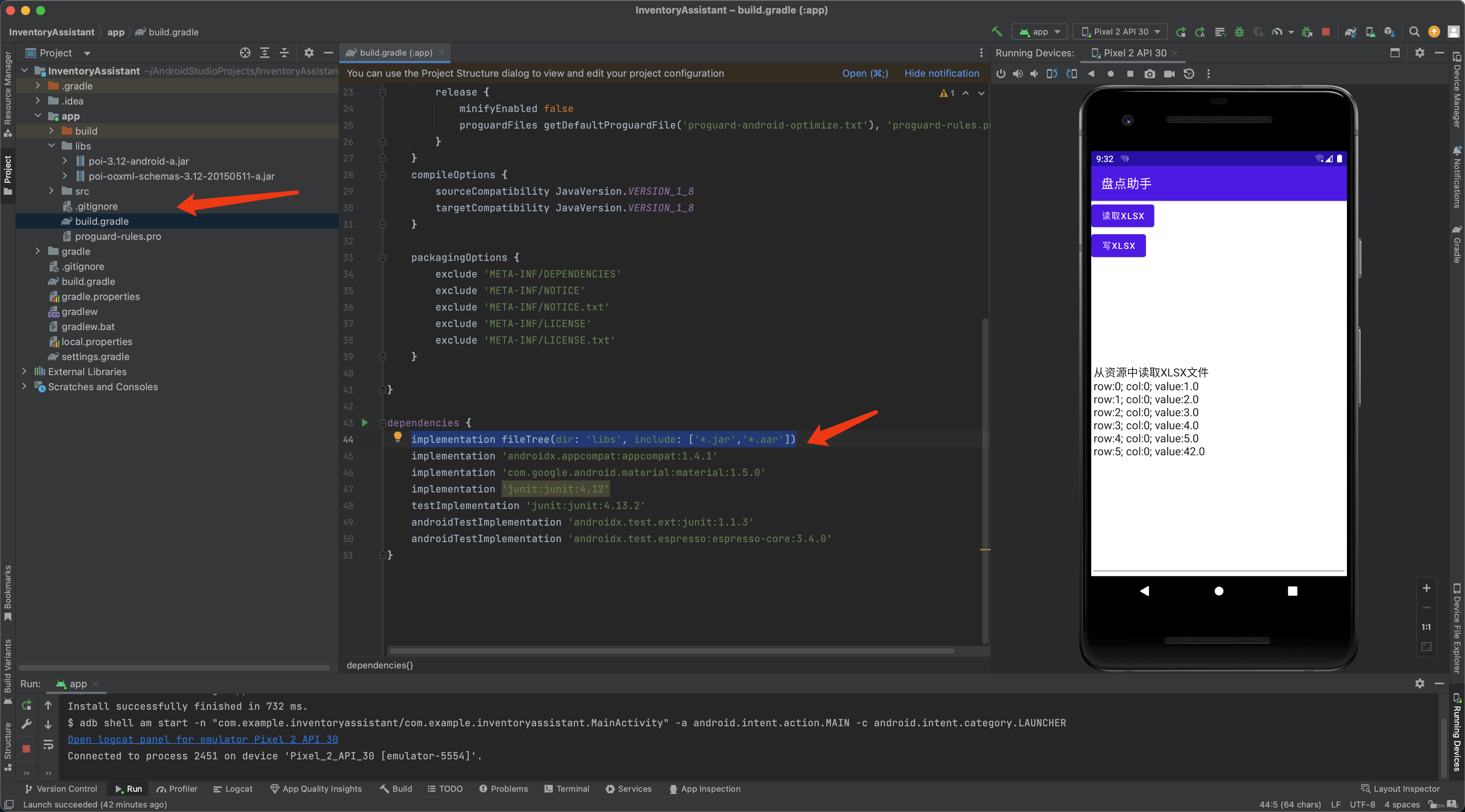
Android中使用POI库读写Excel(.xlsx/.xls)文件
在Android开发中,处理Excel文件是一项常见需求,无论是从Excel导入数据还是导出数据到Excel。Apache POI是一个强大的Java库,专为操作Microsoft Office文档而设计,它也提供了对Android平台的支持。本文将指导你如何在Android项目中使用Apache POI库来读取和写入Excel文件(包…
动态规划算法练习——计数问题
题目描述 给定两个整数 a 和 b,求 a 和 b 之间的所有数字中 0∼9 的出现次数。 例如,a1024,b1032,则 a 和 b 之间共有 9 个数如下: 1024 1025 1026 1027 1028 1029 1030 1031 1032 其中 0 出现 10 次,1 出现…
C# 不用lock写一个多线程程序
多线程并发 当一段代码有可能被不止一个线程同时访问时,且存在共享资源(变量、文件句柄等),可能出现并发冲突。发生并发冲突时如果不加锁,程序的行为是不可预测的。而加锁本身又是一件麻烦事,弄不好会出现死锁,死锁时程…
Gateway基础配置指南
Gateway基础配置指南
一、引言
随着微服务架构的普及,API网关(Gateway)作为微服务架构中的关键组件,其重要性日益凸显。Gateway作为系统的唯一入口,负责处理所有客户端的请求,并根据业务规则将请求转发到…