本文由李亮,王翔宇,程硕,陈翔,黄超,平先尧,魏凌涛联合创作
摘要
汽车动力学及其线控技术是汽车底盘设计中的难题,一直是学界研究的热点。汽车的智能化发展也对底盘线控执行技术提出了更高、更迫切的性能要求。该文介绍了汽车动力学与底盘线控技术的最新进展:针对汽车动力学及控制技术,介绍了动力学建模分析、动力学状态观测以及动力学稳定性控制策略的发展历程及研究现状;针对底盘线控执行技术,概述了面向智能驾驶的线控制动、线控转向、线控驱动发展历程及研究现状;针对汽车底盘集成控制技术,提出了底盘动力学域控制的概念, 系统性地说明了域控制架构和协调控制策略。最后展望了汽车底盘线控与动力学域控制技的术未来研究趋势。
安全是国际汽车行业永恒的主题。随着汽车工业快速发展,汽车保有量迅速增大,交通拥堵加剧,交通事故频发,这些问题造成了巨大的人身伤亡和经济财产损失。为此世界各国及地区均出台各项交通法规、相关政策,希望能够解决汽车交通事故带来的重大社会问题。国际上各大著名汽车公司也致力于研发被动安全、主动安全等汽车技术。近年来,人工智能技术的飞速发展,给汽车产业带来了颠覆性变革,智能网联汽车成为汽车工业的研究热点和未来汽车发展的方向, 这也为解决汽车交通安全难题也带来了新的契机。
汽车底盘线控执行及动力学域控制技术是汽车工业的关键技术,也是智能汽车安全稳定执行的基础与核心。国内外汽车产业各界针对该领域关键技术展开了深入的研究,取得了大量成果。自20 世纪 70 年代以来, 车辆底盘各类动力学电控系统逐渐发展起来,如制动防抱死系统(anti-lock brake system, ABS)、电子稳定性控制(electronic stability control,ESC)、电子助力转向系统(electric power steering, EPS)等,由于底盘多个电控系统相互耦合导致的协调控制问题逐渐成为研究热点。近年来,智能汽车的迅速发展推动了线控转向、线控制动、线控驱动底盘执行等关键技术的创新,也对底盘动力学域控制技术需求迫切。
本文围绕汽车底盘线控执行及动力学域控制技术进行论述,介绍汽车动力学与控制的建模分析、稳定性状态观测、控制策略分析;对智能汽车底盘线控转向、线控制动发展现状和研究进展进行了论述并概述了全矢量线控底盘概念;在综述底盘集成控制相关问题研究的基础上,作者团队提出了面向智能汽车的底盘动力学域控制概念及其架构。最后,展望了汽车底盘技术未来的研究方向,这将对未来汽车底盘技术的发展,奠定提升车辆性能的基础,具有重要指导意义。
1 汽车动力学与控制技术
1.1 动力学建模与分析
车辆动力学建模与相关分析工作经过几十年的发展已经形成了一套以整车动力学建模为根基,关键状态参数估算为补偿的整车动力学建模体系。主要包括:整车动力学建模、轮胎力学建模、车辆质心侧偏角估算、轮胎力估算、轮胎路面附着系数估算等。
1.1.1 整车动力学建模
车辆动力学模型是进行车辆各项动力性能分析、主动控制、功能实现以及参数优化的基础。根据研究目和关注点的不同,国内外学者已经提出了各种不同复杂程度的线性和非线性车辆模型。早在 1940 年,基于轮胎侧偏力学的研究基础,Riekert 和Schunck 建立了经典的线性二自由度 ( 侧向自由度和横摆自由度 ) 汽车理想模型,该模型成为了汽车动力学研究的基础。一般根据不同的使用目标选用具有不同自由度的车辆模型,车辆动力学模型主要包括:1) 结合纵向、侧向、横摆的 3 自由度车辆模型;2) 结合纵向、横摆、侧倾的 3 自由度车辆模型;3) 结合纵向、侧向、横摆、侧倾的 4 自由度车辆模型;4) 结合横摆、垂向、俯仰、侧倾的 4 自由度车辆模型;5) 结合纵向、侧向、垂向、横摆、侧倾、俯仰的 6 自由度车辆模型;以及 6) 随着计算机技术的发展而兴起的多体动力学车辆模型等。
1.1.2 轮胎力学模型
轮胎作为车体和道路之间唯一的连接部件,承担了所有外力传递的角色,所以轮胎动力学特性建模对车辆整体模型的准确性起到关键性作用。一般来说,轮胎稳态力学模型主要分为理论模型、经验模型以及半经验模型 3 种。理论模型是基于轮胎物理结构和变形机理而建立的具有物理意义的描述模型;经验模型往往来源于轮胎试验数据并通过数据拟合的方法得到; 半经验模型是在理论研究和试验分析的基础上完成的建模工作,不仅理论精度高,扩展性好,而且与试验数据吻合度好。目前比较经典的半经验模型主要有UniTire 统一模型和 Magic Formula 模型。
追溯到 1954 年,Fiala 以弹性梁模型为基础对轮胎印迹内的变形和侧向力进行了研究,给出了侧向力和回正力矩随侧偏角之间的变化关系。1965 年,Frank 以 Fiala 模型为基础建立了复杂的梁模型来模拟轮胎侧偏时胎体的变形。1966 年,Pacejka 将胎体变形简化为拉伸的“弦”,建立了较为精确的纯侧偏特性理论模型。1972 年,Pacejka 和 Fancher 等对轮胎的侧偏纵滑特性做了精确的数学分析, 提出了HSRI-NBS-II 模型。1987 年 Pacejka 和 Bakker 建立了可以精确描述侧向力,纵向力以及回正力矩的半经验模型 Magic Formula。
另外,还有一些基于前人轮胎模型研究而进行扩展的轮胎模型以及其他经验或半经验模型。可以根据模型复杂程度的不同和使用目的的不同选择不同的轮胎模型来开展相关的研究工作。
1.2 动力学稳定性关键状态观测
车辆动力学与控制中所用到的关键参数主要有:横摆角速度、纵向加速度、侧向加速度,纵向车速,质心侧偏角以及路面峰值附着系数等,其中又以质心侧偏角、轮胎力和路面峰值附着系数最为重要,也最难估算准确。
1.2.1 质心侧偏角估算
车辆质心侧偏角是指车辆实际速度与车辆纵轴之间的夹角,数值上可以表述为侧向车速与纵向车速比值的反正切值。质心侧偏角估算主要分为基于观测器和基于神经网络 2 种类型。基于观测器的质心侧偏角估算方法主要包括:基于 Luenberger 观测器算法 (Luenberger observer,LO)、基于滑膜观测器算法 (sliding-mode observer,SMO) 以及基于Kalman 滤波观 测器算法 (Kalman filter,KF)。LO 和 SMO 对系统模型都有较强的依赖性,模型的精确程度对估算结果都有较大的影响,但都可以用于线性和非线性系统。相比前 2 种观测器,KF 观测器虽然对模型也有很强的依赖性并且只能用于线性系统,但是其基于KF 的变形系列观测器却可以应用于不同的场合。扩展Kalman 滤波 (extended Kalman filter, EKF) 是对非线性系统线性化处理之后,用线性模型代替非线性进行估算,其缺点是会带来线性化累积误差;无迹 Kalman 滤波(unscented Kalman filter, UKF) 是通过无味变换
(unscented transfor mation,UT),再根据系统状态先验概率密度分布的均值和协方差按照一定的采样策略获得 Sigma 点集,然后对每个采样点进行非线性传递, 将系统近似线性化处理,与EKF 相比不会引入线性化误差,无迹 Kalman 滤波一般会具有更好的效果;容积 Kalman 滤波 (cubature Kalman filter, CKF) 基于三阶球面径向容积准则,并使用一组容积点来逼近具有附加Gauss 噪声的非线性系统的状态均值和协方差,是解决非线性系统状态估计的强有力工具。
针对所有轮胎力饱和时,车辆侧滑角的可观测性将大大恶化甚至丧失的问题,Ding 等基于局部线性化和 Routh-Hurwitz 准则,设计了扩展 LO 观测器,对车辆质心侧偏角进行有效的观测。Chen 等采用降阶滑膜观测器并将非线性阻尼集成到 SMO 中,对车辆质心侧偏角进行观测,在保证精度的情况下减小了计算量。作者团队提出了一种结合侧偏角速率反馈和阻尼项的变结构扩展 Kalman 滤波器,对质心侧偏角进行观测,其主要思想是补偿由路面摩擦估计误差引起的模型误差,而阻尼项的主要思想是抑制误差积累。作者团队还采用自适应无迹 Kalman 滤波器对质心侧偏角进行观测,通过试验和仿真方法验证了该方法可以弥补由于传感器噪声和外界干扰带来的误差。针对车辆的非线性动力学、参数不确定性以及传感器噪声等给其观测带来困难的问题,作者团队提出了一种自适应容积 Kalman 滤波方法对车辆质心侧偏角进行估算并取得了较好的观测效果。Du 等选取方向盘转角、横摆角速度、侧向加速度和四轮转速为输入,车辆质心侧偏角为输出,应用神经网络对质心侧偏角建立预测模型,并与 veDYNA 对侧滑角的观测结果进行了比较,验证了该预测模型的准确性。
1.2.2 轮胎力观测
早期车辆轮胎力的数据常由实验结果推算得到。近年来,各国研究人员通过先进的特定传感器设备对轮胎力进行直接测量。M. Doumiati 等通过轮胎六分力传感器对各向轮胎力进行直接测量,其测试结果精确, 但设备成本昂贵,难以普及应用。吉林大学陈虹教授和麻颖俊等构建了基于滑模观测器的轮胎力联级估计方法,该方法的估计结果具有较高的准确性;作者团队设计了一种轮胎力的自适应统一观测法并将其应用到横向稳定性控制当中。
1.2.3 路面峰值附着系数估算
路面峰值附着系数的估算对车辆行驶工况识别和动力学稳定性控制至关重要。路面峰值系数估算主要有基于试验法 (experiment-based) 和基于模型法(model-based)2 种方法。基于试验的方法主要有:1) 基于光学传感器,根据测量不同路面反射的具有不同波长的红外线进行路面识别,其基本工作原理如图 1 所示;2) 基于声学仪器,利用安装在汽车底盘上的声学仪器检测路面和轮胎之间的噪声,通过对噪声进行频谱分析识别路面的类型;3) 基于胎面传感器,通过胎面传感器监测轮胎 - 路面之间的形变,结合具体算法估计路面附着系数。
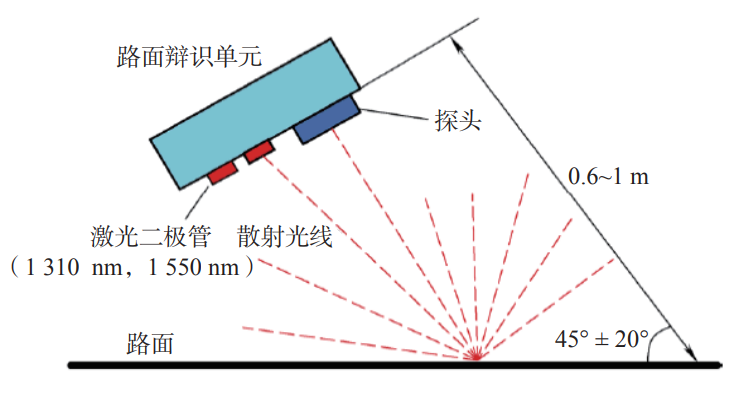
图 1 利用光学传感器进行路面辨识的基本原理
关于基于模型的路面峰值系数估算方法主要有:
1) 基于 Slip-Slope 关系的路面附着系数估计方法, GUSTAFSSON 提出了基于 Slip-Slope 的路面附着系数估计方法,该方法利用车轮在低滑移区 ( 滑移率 5% 以内) 附着系数和滑动率之间的近似线性关系,根据不同路面附着系数和滑动率之间的斜率大小不同来辨识路面附着系数。2) 基于轮胎力学模型的估算方法,袁朝春等利用Burckhardt 轮胎模型提出了一种基于类比特性的路面辨识算法。3) 基于非线性公式拟合的估计方法,LEE 等设计了一种有效的轮胎半径观测器和轮胎法向力观测器,用以计算车轮转速和车速测量值的滑移率,再进行轮胎纵向力估计,最后根据非线性公式拟合并结合递归最小二乘法计算小滑移率区的斜率以估计路面附着系数。4) 基于路面状态特征因子的估计方法,由于不同路面的附着系数 μ 与滑轻率 s 的曲线(μ-s 曲线)具有相似的非线性变化关系,不同道路的 μ-s 曲线不同,每条曲线与 s 轴围成的面积也会不同,王博等利用路面状态特征因子,给出了7 种典型路面的特征因子阈值及其区间用以对路面峰值附着系数的辨识。5) 多信息融合估计方法,作者团队针对路面峰值附着系数估算问题进行了深入研究,提出了一系列多信息融合估算方法,并通过实车试验证明了其有效性。
1.2.4 车辆其他状态参数估算
吉林大学初亮教授等设计了一种自适应 Kalman 滤波方法,该方法能够在线更新测量噪声的均值与方差,使得车速估计的结果具有良好的准确性和鲁棒性。清华大学贾钢基于车轮离地时的悬架模型,构建了无迹 Kalman 滤波算法对车身侧倾角和侧倾角速度进行估计。作者团队对车辆关键参数提出了一整套完善的估算体系,包括纵横向车速、轮胎力、质心侧偏角、道路坡度、轮胎滑移率等。
上述方法均为汽车智能安全控制中的车辆状态估计提供了一种准确且成本较低的实时观测方法。多自由度动力学模型解算需要将车辆状态参数划分为外部参数和内部参数,构建解算值 - 传感器信息值双向观测补偿框架,其中外部参数为控制指令油门开度、制动踏板输入、方向盘转角以及观测到的轮胎垂向力、侧向力、纵向力、路面附着系数等。通过外部参数,解算出车辆的内部状态参数,包括整车横、纵、垂向加速度、俯仰角加速度、侧倾角加速度、横摆角加速度以及四轮的旋转、垂向运动、悬架跳动等。解算出的车辆内部参数与驾驶员外部输入一方面可校验车载传感器信号, 避免因传感器失效而导致的车辆状态误判所造成的事故,另一方面可补偿两者间的测量与估计误差。通过模型解算,实时量化动力学稳定性的控制边界,为智能驾驶提供类驾驶员视角,进而实现智能汽车底盘动力学域集成控制。
1.3 动力学控制策略分析
汽车底盘动力学控制是保持车辆操纵稳定、提高车辆动态响应和乘适性的关键。汽车动力学控制技术自纵向控制 ABS、牵引力控制系统 (traction control system,TCS) 发展至横向控制主动式舵角控制器(active yaw control,AYC),并随着主动转向和再生制动的技术的发展有更加多样的控制形式。
自博世公司 1984 年首次进行车身电子稳定系统(electronic stability program, ESP) 功能测试,汽车动力学控制技术与车辆电控技术均得到了蓬勃发展。在汽车动力学理论领域,博世公司A.T. Van Zanten 等率先提出将制动控制用于车辆操纵稳定性,拉开了ESC 研究的序幕;斯坦福大学动力学设计实验室提出漂移工况下的车辆动力学控制理论,并在自动驾驶车辆上实现了漂移控制;作者团队基于大量试验数据提出车辆动力学扩稳理论与方法。在车辆电控领域,国外博世、大陆、TRW 等企业较早开发出 ESC 产品并占有了绝大部分国际市场;中国的元丰、万安、科密等企业早年间开发出了ABS \ TCS 产品实现了中国国内的大规模应用,近年来英创汇智、元丰等企业进一步开发出ESC 产品并实现规模应用。
1.3.1 制动防抱死系统(ABS)
制动防抱死系统(ABS)通过调节制动压力防止车轮抱死,进而使车轮滑移率保持在较小范围内以提供较大的纵向力和侧向力。逻辑门限控制策略在 ABS 中被广泛采用,其思想是根据当前车轮加速度对车轮的压力进行调节,当车轮急减速时减小车轮制动压力, 当轮速恢复时增加车辆制动压力。基于逻辑门限的 ABS 策略对车辆模型及参数识别依赖小,逻辑简单但标定繁琐。结合逻辑门限控制和模糊规则,基于模糊控制的ABS 的策略被进一步提出。比例- 积分 - 微分(proportion-integration-differentiation,PID)控制策略根据车轮滑移率进行反馈调节,相较于逻辑门限和规则式策略,PID 策略有效减少了标定过程。
滑模控制、模型预测控制、混杂控制等策略在ABS 中均有大量的研究。此类方法以车轮滑移率为首要控制目标,重度依赖车辆纵向速度;此外,为了实现滑移率的精确控制,还需要制动执行器提供精准的制动响应,此类方法多用于具备有线控制动系统的车辆中, 且需要有附加传感器对车辆车速进行精准测量,在实际产品中未见广泛应用。
1.3.2 牵引力控制系统(TCS)
牵引力控制系统(TCS)是 ABS 的理论在驱动领域的扩展 , 其利用发动机扭矩调节和驱动轮制动压力调节,通过二者的协调控制,抑制打滑车轮,使其滑转率维持在理想滑转率范围内,保证汽车具有较高驱动能力的同时,维持一定的横向稳定性。TCS 的主要控制逻辑为根据当前路面条件协调驱动与制动,进而实现车轮滑移率的调节。路面附着识别、轮胎力估算、纵向车速观测均是 TCS 控制中的关键。在控制器策略方面,F. Borrelli 等将模型预测控制运用于发动机扭矩调节和车辆制动力矩控制,作者团队将模糊控制于特殊路面的 TCS 控制取得了较好的鲁棒性,此外如自适应滑模控制等方法均被广泛应用于牵引力控制过程中。
1.3.3 主动式舵角控制器(AYC)
基于ABS 和 TCS 等纵向动力学控制技术,进一步考虑制动或驱动对纵向力和侧向力的影响,AYC 发展而来。AYC 通过主动控制车轮滑移率和纵向力,受车轮与路面作用的附着椭圆影响,车轮测量力也得到间接调节,进而控制整车横摆方向的附加力偶矩以调节车辆横向与横摆运动状态。
博世公司的 ESP 采用分层策略将 AYC 与 ABS、TCS 结合,AYC 策略根据当前驾驶员操作计算名义横摆角速度与侧偏角进而计算得到附加横摆力偶矩。基于 PID 和鲁棒控制策略,ABS 或 TCS 的调节车轮制动力或驱动力实现纵向力的直接控制,并利用通过车轮滑移率间接调节车轮侧向力,实现制动或驱动系统对附加横摆力偶矩的响应。博世的ESP 中使用的分层控制、PID 和鲁棒控制策略使其对不同的车型具有较好的适应能力且对环境表现出了较强的鲁棒性。
模型预测控制、最优控制、滑模控制、H 无穷控制器在 AYC 中均有广泛采用,且在特定工况下表现出了较优的控制效果。但 AYC 触发过程中车辆通常表现出了较强的非线性,上述控制策略的进一步推广需考虑该非线性问题。局部线性化的方法被广泛运用于处理 AYC 的非线性问题,但该方法仅在线性化点附近具有较好的近似效果,无法覆盖 AYC 工作的所有区间。实时估计车辆参数也有效地处理了AYC 控制中的非线性问题,但对估计精度和收敛速度有较高的要求。SHI K 等采用模糊规则合成车辆在稳定和失稳条件下的模型,但车辆处于稳定和非稳定之间时对车辆非线性拟合的效果较差。作者团队将非线性 MPC 用于 AYC 的控制取得了较好的效果, 但具有较大的运算负担。基于 Takagi–Sugeno (T-S) 模糊模型的滑模控制等策略在处理 AYC 控制中的强非线性和大运算量间取得了较好的平衡,近年来在AYC 控制中得到了一定的应用。
1.3.4 制动能量回收与动力学控制协调
随着电控执行器的进一步引入,车辆纵向横向动力学控制得到了进一步发展。再生制动技术使用电机提供部分制动力同时回收车辆动能,有效降低了新能源汽车的能耗,但再生制动的引入将影响车辆的制动过程,影响传统 ABS 等策略的正常工作。在工程实际中,再生制动在 ABS 等策略介入时退出,此类方法牺牲制动能量回收以保证 ABS 等可按原有策略进行控制,但再生制动的退出减少了车辆回收动能,且未对再生制动和机械制动进行协调,故再生制动退出的瞬间将可能有短暂制动力不足。CHEN Z 等基于规则式策略将制动力矩分配至机械制动、电机与缓速器。QIU C 等根据相平面法计算理想制动力矩,并根据串联策略将制动力矩分配至固定的机械制动和动态调节的电制动。作者团队基于滑模控制策略设计了ABS 触发过程中的电制动切换策略,实现滑移率准确控制的同时使电制动缓慢退出。
电机制动具有扭矩响应准确、速度快的特点,利用电制动补充机械制动的扭矩误差,可使 ABS 等策略响应更加精准。WANG B 等基于最优控制设计鲁棒滑移率控制器,并利用机械制动与电制动结合实现精准制动力控制。Lv C 等进一步考虑传动系统的刚性和阻尼, 基于扩展卡尔曼滤波实现了机械与电制动的同时作用。
2 底盘线控执行技术
作为自动驾驶系统的关键执行系统,线控系统的功能是要代替驾驶员的手和脚来进行车辆的转向、制动和加速。因此,线控底盘关键技术也主要有线控转向(steer-by-wire,SBW)、线控制动(brake-by-wire,BBW)和线控驱动(drive-by-wire,DBW)3 大技术,已然成为车企的核心竞争力之一。其中,线控驱动已较为成熟,线控制动处于量产应用及完善阶段,而线控转向尚不成熟。此外,传统的线控底盘将三者分开进行考虑,不能充分考虑各个系统的耦合。因此,本研究团队设计了一种驱动 - 制动 - 转向 - 悬架一体化的多功能电动轮系统,以充分考虑系统之间的耦合性,提高系统控制的自由度,对车辆实现全矢量控制(full vector control,FVC)。基于此,本节前 3 小节分别对 SBW、BBW 和 DBW 统的发展及研究进展进行综述,而第 4 小节对全矢量线控底盘技术进行详细介绍。
2.1 制动系统发展概述
2.1.1 线控制动技术
商用车和乘用车的制动系统有着完全不同的发展路径。商用车载重大、工作条件恶劣,其制动系统以气压制动系统为主。现有的气压线控制动系统多为基于传统的气压制动系统演化出的具有线控功能的形式,通常又称电子制动系统(electronic braking system, EBS)。其系统结构大致经历了 3 次主要迭代。在 EBS 初代产品中,通过在原有制动系统中继动阀前端增加输出压力与控制电流呈对应关系的比例阀实现压力调控,此类构型实现了线控的基本要求但系统部件数量多、气路复杂;第2 代EBS 将比例阀与继动阀组合成比例桥模块,其工作原理与初代 EBS 保持一致,但简化了系统部件和气路连接;第 3 代 EBS 中使用开关阀替代了 2 代桥模块中的比例阀,利用进气阀和排气阀的交替开关实现气压的线性调控,此类构型有效提高了阀组的工作寿命,并减小了系统成本,是当前发展的主流。
乘用车的线控系统自威廉 · 迈巴赫于1900 年发明鼓式制动器起,至今已有 120 年的历史,期间诞生了多种形式的制动系统,如图 2 所示。但就总体而言,其发展大致可以划分为以下5 个阶段:采用人力的纯机械制动和液压制动系统;兼用人力和发动机动力作为制动力源的伺服制动系统;发动机提供所有制动力源的动力制动系统;以 ABS、TCS、ESC 等为代表的成熟的电液制动系统;以电子驻车制动系统 (electric parking brake, EPB)、电控液压制动 (electric hydraulic brake, EHB)、电子机械制动系统 (electric mechanical brake, EMB) 等为代表的 BBW 系统。
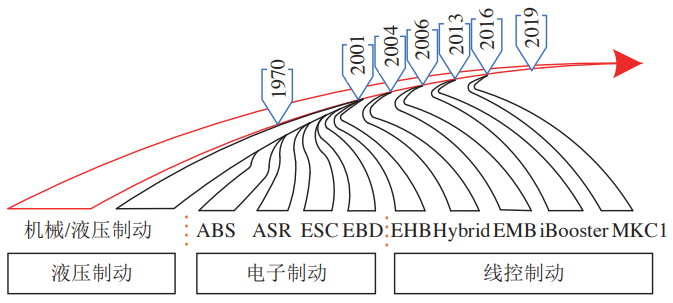
图 2 车辆制动系统发展历史
当前,ABS、TCS、ESC 等电子制动系统已然发展成熟,极大提升了整车的安全性。然而,随着汽车电子化、智能化的发展,以及对节能环保的要求,车辆对于 BBW 系统有着越来越高的需求。这一方面可以简化设计,方便与其他系统集成;另一方面,可以减少油液污染,方便制动能量回收。诸多 BBW 系统中,最理想的制动莫过于 EMB 系统,该系统直接通过电机向制动盘施加制动力对车辆进行制动,因此无需液压油或压缩空气。这不仅可省去诸多管路和传感器,且信号传递更加迅速。然而,由于成本和可靠性的问题,该系统仍处于试研阶段,尚未应用于量产车。比如,2014 年大众在巴黎车展上展出的 Passat GTE 混合动力车型。EHB 系统准确来说是一种半解耦的 BBW 系统,其保留了液压制动管路,但是踏板与主缸分离,改为用电机来推动主缸,实现驾驶员与制动系统解耦。这可以认为是传统液压制动系统和纯电制动系统之间的过渡产品, 是当前研发的热点之一,目前也已经得到应用。比如2001 年奔驰的 SL 级轿车,最近几年丰田的混合动力车型Prius,博世的 iBooster,天津英创汇智的 TBooster, 上海拿森的 NBooster 等。近年来,集成式 BBW 系统也是市场较为关注的一种 BBW 系统,比如中国大陆的MK C1,天津英创汇智的 OneBox 等。这种 BBW 系统将真空助力器、电子真空泵、以及传统的 ESC 等功能集成在了一起,使得整体体积和重量大大减小。当前适用于自动驾驶的主流方案是 EBooster + ESC 的方案,如图3 所示。而集成式的 BBW 系统是发展的一大趋势, 应该给予较多的关注。
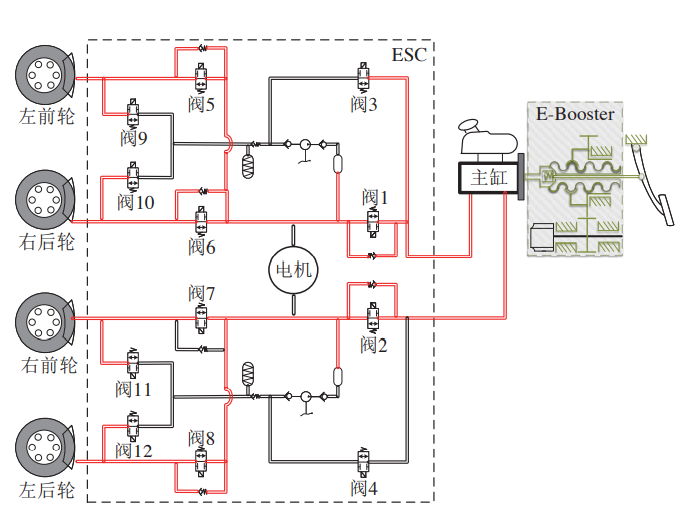
图 3 基于 EBooster 和 ESC 的线控制动系统
2.1.2 线控制动技术研究综述
作为自动驾驶系统的关键执行系统之一,BBW 系统主要实现 3 个功能:1)助力功能:电子控制单元(electronic control unit, ECU) 采集或估计踏板位移信号,向执行电机发送指令,通过电机推动主缸进行制动, 再由ESC 进行制动力分配;2)主动制动:上层策略根据当前车辆状态和驾驶员操作,向 BBW 系统发出制动请求,BBW 系统则需要准确、快速地响应这个请求;3)能量回收:由于 E-Booster 实现了踏板力与轮缸压力的解耦,适用于更大加速度的制动能量回收,而BBW 系统需要在制动工况下尽可能多地回收能量,以增加舒适性并实现节能减排。当前学术方向的研究也主要集中于这 3 个方面。
由于 BBW 系统取消了踏板和主缸之间的机械连接,踏板力需要用通过模拟器或算法模拟的方式提供给驾驶员,踏板力模拟的好坏决定了 BBW 系统品质的优劣。关于这方面的研究不多,且研究多集中于实验方法,一般是通过对大量的实验数据进行分析归纳,得到踏板力与踏板行程和车辆状态之间的关系, 通过弹簧或作动器对踏板力进行模拟。比如,采用 LMS Imagine. Lab AMESim (advanced modeling environment for performing simulation of engineering systems,多学科领域复杂系统建模仿真平台) 进行建模对脚感进行模拟,考虑到橡胶反应盘刚度、橡胶阀开度、制动主缸活塞、制动钳、制动管变形和摩擦衬垫变形等因素对脚感的影响。对模拟器本身进行了研究,针对安装阻尼套带来制动系统刚度过小的问题,对不同形状和不同材料的垫片进行了一系列的实验,然后从卡钳对对脚感进行测量,采用 6σ 原则对参数进行了优化设计。
主动制动旨在提高车辆的稳定性和安全性,高级驾驶辅助系统(advanced driver assistance system, ADAS)、自动制动系统 ( autonomous emergency braking, AEB) 及自动驾驶等都使用到了这一功能,因此,主动制动策略近年来得到了广泛而深入的研究。这些研究总体上可以分为基于经验设计的方法和基于动力学模型计算的方法。早些年,韩龙等对高速开关阀的特性进行了深入研究,在此基础上分析了各元件参数对系统稳定性的影响,并提出相应的控制策略。后续的相应研究越来越多,而且越来越多的控制方法被提出来。比如, 作者团队采用模型预测控制,将主动制动应用于车辆侧向稳定性控制和防侧翻的控制中,得到一个三维动态稳定控制器。S. Formentin 等采用数据驱动的方法对主动制动过程进行研究,通过与多种控制策略进行对比,证实了该方法的有效性。而 K. D. Kusano 等则分析了前向预警、主动制动等技术对车辆安全性的影响,结果表明,主动制动可以将事故的严重性降低 14% ~ 34%,人员伤亡可以降低 29% ~ 50%,证明了主动制动技术的优越性。
制动能量回收是汽车节约能源的一个重要措施, 特别是随着新能源汽车的发展,这方面的研究也越来越多。比如,王奎洋等在对传统制动能量回收装置分析的基础上,提出了一种液压储能式制动能量再生装置和基于逻辑判断的能量回收策略。裴晓飞等基于其设计的工作分解结构(work breakdown structure,WBS) 线控制动系统,设计了 3 种制动能量回收策略进行了比较分析,表明串联式的策略较并联式的策略回收效果要好。作者团队则提出了一种通过降档来提高制动能量回收效率的方法,大大提高了能量回收率。
2.2 线控转向技术
2.2.1 转向系统发展概述
商用车由于负载较大, 转向系统以液压助力为主。 现有电控液压助力转向 (electronic hydrostatic power steering,EHPS)系统基于传统的液压助力转向(hydrostatic power steering,HPS)系统进行改进,使其具有线控转向功能,是当前商用车自动驾驶应用的主流。自1894 年乘用车安装第1 款现代意义上具备方向盘的转向系统开始,其转向系统大致经历了5 个阶段: 1)早期的纯机械转向系统;2)福特最早提出的液压助力转向系统;3)丰田首推的电子液压助力转向系统;4) 新一代的电动助力转向系统;5)摆脱机械连接的线控转向系统和具有主动转向功能的前轮主动转向系统等。可见,车辆转向系统一直在向着电动化、灵活化、简洁化的方向发展。特别是随着近年来自动驾驶技术的发展,SBW 系统研发水平的高低已成为一个车企的核心竞争力之一,得到大量关注。
事实上,线控转向的概念 20 世纪 50 年代就被提出, 至今已有近 70 年的历史。但是, 受限于电控技术的发展,直到 20 世纪 90 年代,各个汽车企业才逐渐推出装配 SBW 系统的概念车型,SBW 技术也慢慢走入公众视野。典型的比如 1999 年宝马推出的 BMW Z22,2001 年奔驰推出的 F400 Carving,2002 年通用推出的 GM Hy-Wire,2003 年丰田推出的 Lexus HPX, 2005-2011 年间日产陆续推出的 PIVO、PIVO 2 和 PIVO 3,以及近些年来英菲尼迪的 Q50 和耐世特的 SBW 系统等。
其中,只有英菲尼迪 Q50 是一款量产车型,该车装备的线控转向系统保留了机械备份,但采用离合器进行连接。系统正常工作时,离合器断开;当系统出现故障时,离合器闭合,使得驾驶员能够对车辆进行机械操纵,以此实现冗余设计。而耐世特公司在上海车展上展示的随需转向系统和静默方向盘系统,则完全取消了机械连接,使得系统更为轻便,转向更为灵活。此外,配备静默转向系统的车辆还可以在自动驾驶模式下自动将转向管住收缩至仪表板内,从而增加可用空间, 提升驾驶舱舒适度。尽管 Q50 已经因为各种问题召回, 但其不失为一种大胆而革命性的尝试。在 Q50 出现的各种问题中,关于转向系统的问题描述如下:“当发动机在电瓶处于低电压状态下启动时,控制单元有可能对方向盘角度作出误判,导致方向盘和车轮的转动角度存在差异。即使方向盘回到中间位置,车轮也可能不会返回到直行位置,导致车辆不能按照驾驶员意图起步前行或转向,存在安全隐患”,可见,系统的安全性和可靠性仍然是一个比较严峻的问题。
此外,各国高校针对 SBW 系统也进行了大量研究, 比如斯坦福大学的双电机前轮独立线控转向系统、同济大学的微型电动车春晖三号、吉林大学的线控转向试验车、清华大学的全线控实验小车等,基本以理论研究为主。探索 SBW 系统的不同构型以及改善其控制方法,仍旧是一个比较重要的研究领域,是保证系统安全、稳定、可靠的关键。
2.2.2 线控转向技术研究综述
当前,线控转向系统的研究主要集中在 4 个方面: SBW 系统架构设计、路感反馈控策略研究、转向执行控制策略研究以及故障诊断与容错控制策略研究。
狭义上说,SBW 系统特指没有机械连接的转向系统,这是从系统的结构上进行的一个区分。但着眼于功能,从广义说,任何能够将驾驶员输入和前轮转角解耦的转向系统都可以看成是 SBW 系统。在此定义下, 基于当前广泛使用的齿轮齿条式转向器的线控转向系统如图 5 所示,其中① - ④为电机可能安装位置,而⑤为电磁离合器。根据有无⑤,SBW 系统可以分为保留机械软连接的SBW 系统和无机械连接的SBW 系统2 大类。而根据电机安装位置和电机形式的不同,又可以分为多种形式。除此之外,近年来研究较多的还有后轮转向系统,以及四轮独立转向系统,非常适合于应用于自动驾驶系统,以提高车辆的灵活性和稳定性。当前自动驾驶系统中应用较为多的转向系统仍然是传统的 EPS 系统,以及采用双绕组电机的 EPS 系统。然而,图 4 所示的 SBW 系统以及图 8 所示的四轮独立转向系统是转向系统发展的趋势,也是当前研究热点, 应该给予较多关注。
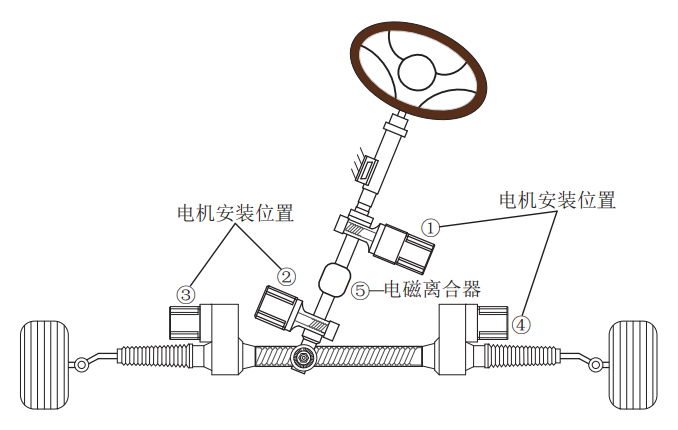
图 4 线控转向系统原理图
路感是一个比较抽象的定义,其定义之一是指驾驶员通过方向盘得到的车辆行驶中的转向阻力矩,该阻力矩主要包含回正力矩和摩擦力矩 2 部分,其中,回正力矩是使车轮恢复到直线行驶位置的主要力矩之一, 其数值的确定是车辆设计中的一个难题,通常由经验、半经验、统计或实验的方法获得。回正力矩与车辆前轮的受力状态存在直接关系,而前轮受力又和车辆实时的运动状态及路面附着直接相关。因此,通常把总的回正力矩除以自方向盘到前轮总的力传动比近似得到的方向盘手力矩看成是路感。路感可以采用在齿轮齿条上安装传感器的方法直接测量获得。但是,这种方法安装不太方便,成本比较高,而且采到的数据噪声较多,需要经过滤波才能使用,很少采用。就当前的研究来看,路感通常采用基于经验设计和基于模型设计这 2 种方法获得。
基于经验设计的方法,通常是将路感设计为方向盘转角、车速、横摆角速度等参数的非线性函数关系式,在不同条件下为驾驶员提供不同的路感,简单高效,但是自适应性和精度较差。不同的研究人员,考虑到力矩产生的因素不同,提出的表达式也不尽相同。比如,S. Fankem 等将路感分为主反馈力矩、摩擦力矩、阻尼力矩、惯性力矩和回正力矩几个部分,每个部分用一个非线性函数进行表示,综合得到反馈力矩。Jaepoong LEE 等通过实验的方法得到一个三维的参考路感转矩图,将路感表示为齿条力和车速的函数, 通过查表得到反馈力矩。而Ryouhei HAYAMA 等则将转向阻力矩分为方向盘转向力矩、转向力矩以及车辆本身产生的力矩 3 个部分,综合三者以获得不同驾驶条件下的转向力矩。基于动力学模型的方法,是通过参考传统车辆路感产生的动力学原理建立相关的动力学模型,根据车辆的动态响应、驾驶员的方向盘输入等计算与路感相关的轮胎力、摩擦力矩等,最终计算出路感。该方法设计的路感与传统车辆比较一致,适应性较强,是目前研究的主流。但是,这类方法存在着车轮定位参数难以获得的问题,需要通过各种算法来克服。比如,郑宏宇采用Kalman 滤波算法,通过估计齿条受力来间接估算轮胎回正力矩,降低了路感设计的复杂程度,适用于采用齿轮齿条作为转向器的系统。Seong Han KIM 等采用整车动力学模型和转向系统模型相结合的方法,其中,整车模型考虑了侧偏角、正压力和轮胎属性,用来计算轮胎和地面间的回正力矩,而转向系统模型用来计算传递到手上的力。而 TAO Weinan 等则提出一种基于二自由度整车模型的路感估计算法,该方法考虑了整车的非线性特性及转向系统的摩擦和刚度,同时对转向助力对路感造成的影响进行补偿,可适用于具有较大加速度的情形。
一旦获得期望的转向阻力矩,剩下的工作就是控制路感反馈电机达到期望的力矩。最常用的算法是PID 算法。此外,研究人员还提出了各种高级算法用来处理各种干扰和不确定性因素,如自适应控制算法、自抗扰控制算法、三步非线性控制方法等。尽管如此, 如何进行位移、力矩联合伺服控制,提高路感控制的精度,仍旧是一个亟需解决的难题。
SBW 系统的转向执行控制策略可以分为上层策略和下层策略 2 部分。其中,上层策略根据当前车辆的状态和驾驶员的输入,在尽量满足控制目标和约束条件的情况下,计算出期望的前轮转角;而下层策略则是由转向控制器控制转向电机执行该指令,快速、准确地达到该目标转角。由于线控转向系统的灵活性,衍生出很多控制算法。总体而言,算法可以总结为基于经验设计的方法和基于动力学模型计算的方法这 2 大类。
基于经验设计的方法主要是根据车辆在不同工况下对操纵稳定性要求的不同来进行设计。在低速工况下,汽车应具有不沉重而适度的转向盘力与不过于大的方向盘转角,还应具有良好的回正性能;高速、低侧向加速度工况下,汽车应具有良好的横摆角速度频率特性、直线行驶能力、回正性能和较大的转向灵敏度,且转向盘力不宜过小而应维持在一定数值,以给驾驶者稳定的路感。因此,转向控制的基本原则是:低速时减小传动比,提高灵活性;高速时增大传动比,增加稳定性。比如,Se-Wook OH 等将车辆转角描述为随车速变化的函数关系式,通过在不同工况下设置不同的参数值,可以调节转向特性达到设计者的期望值,低速时增加操作性,高速时增加稳定性。而施国标等则从转向特性出发,分别基于横摆角速度增益不变和侧向加速度增益不变的原则对传动比控制规律进行了研究,并将二者按一定比例系数结合提出第 3 种控制规律,达到变传动比控制的效果。后续很多工作对策略进行了修正。基于动力学模型计算的方法旨在提高车辆的稳定性。因此,也有研究人员将这种方法归结为车辆稳定性控制方法,其基本思路是根据当前车辆状态、外界环境和驾驶员输入提出控制目标,然后根据控制目标计算参考前轮转角,控制前轮转角改变轮胎侧向力,对横摆力矩进行补偿。由于车辆实际运行工况复杂、状态多变且驾驶员风格各异,对车辆稳定性控制的自适应性和鲁棒性提出了较高的要求,相关方面的研究也成为当前研究的热点。几乎所有常见的控制算法都可以在稳定性控制中找到应用,如 PID 算法、最优控制、鲁棒控制、滑模控制、模糊控制、神经网络控制、模型预测控制等。
在上层策略提出目标转角的基础之上,需要由转向执行电机对转角指令快速进行响应。转向执行电机和路感反馈电机一起,可以归结为电机控制的问题,有许多相关方面的研究。但是,工程上最常用的还是 PID 算法,其他的高级算法要得到应用,还需要进一步进行简化。
2.3 线控驱动技术
线控驱动作为最成熟的线控技术之一,可通过直接扭矩通讯、伪油门安装、节气门调节等方法实现。针对开放发动机和电机扭矩通信接口协议的车辆,线控驱动控制器直接通过控制器局域网络 (controller area network, CAN) 向发动机或者电机发送目标扭矩请求,实现整车加速度控制。此种方案无需进行机械改装, 结构简单可靠。
针对不开放扭矩通信接口协议的车辆,安装节气门调节机构或者伪油门也可实现线控驱动功能。控制器根据车辆状态、加速踏板开度及其变化速率,利用内部算法程序预判驾驶员需求功率或转矩,然后通过电信号控制执行电机的动作,调节发动机节气门开度,进而改变发动机输出扭矩和功率 。除此之外,天津英创汇智采取简单实用的基于伪油门线控驱动技术路径。如图 5 所示,控制器接收加速度请求指令,将其转化为对应油门开度的电压值输出,进而代替原车油门踏板开度传感器的电压信号。在线控驱动模式下,原车油门踏板输出的电压值将不能实现发动机的扭矩请求。

图 5 一种典型线控驱动控制原理图
线控驱动的概念出现在 20 世纪 70 年代,随着电子信息技术的发展,国内外多款车型均配备了线控油门系统。丰田 Lexus 的 LS430 车型采用了全电子的线控油门系统,通过传感器冗余设计提升了行车安全性。本田开发的 i-VTEC 发动机配有线控技术的节气门,大大提高了燃油经济性和输出功率。德尔福开发的第 2 代电子节气门系统具有多项独特的驾驶性能,在综合控制和性能监测上堪称楷模。中国自主研发的线控油门系统也在实车上得到应用,如一汽红旗 HQ3 和奇瑞旗云 CVT 汽车,使得线控驱动技术已然成为应用最为成熟的线控技术之一。传统燃油车上的线控驱动技术主要集中在电子节气门控制及容错控制,各国学者对其进行了广泛研究。在控制上,清华大学、吉林大学都开发出了发动机电控节气门控制器,实现对汽车发动机的扭矩控制;控制策略上采用线性或非线性控制,提升系统在参数扰动下的鲁棒性,降低系统超调量和瞬态误差。在系统安全上,通过冗余设计及故障诊断提升系统可靠性。与传统燃油汽车和集中式驱动汽车的转矩平均分配策略相比,分布式驱动汽车可矢量分配各车轴或车轮的驱动转矩,有利用于协调整车各项性能。在保证车辆横摆力矩要求满足的前提下,采取前后节能分配、左右安全调节的转矩分配方法,减少对能量的消耗。
2.4 全矢量控制线控底盘技术
传统汽车是典型的欠驱动系统:只有油门踏板、制动踏板和方向盘 3 个关键的操纵装置,只能实现车辆总体的纵向和横向 2 个相对独立的可控输入,其动力学控制难度大、易失稳。随着汽车电控技术的发展,通过电控单元实现的控制输入量逐渐增多,汽车逐渐朝着全驱动甚至过驱动系统转变。
每个车轮受到的路面作用力都可分为纵向、横向和垂向 3 个相对独立的力,因此一辆常规四轮车辆系统的最大独立输入集合就包含上述的 12 个作用力(4 个车轮 × 3 个方向)。在此,作者团队尝试定义:如果一辆汽车能够实现所有车轮的三维度作用力均独立可控, 那么就称为全矢量控制(full vector control, FVC)汽车。基于实验室已具备的轮毂电机驱动技术和电液线控制动技术,作者团队提出大转角的独立转向机构和基于磁流变阻尼器和空气弹簧的主动悬架的方案,实现驱动- 制动- 转向- 悬架一体化的多功能电动轮系统, 其构想如图 6 所示。
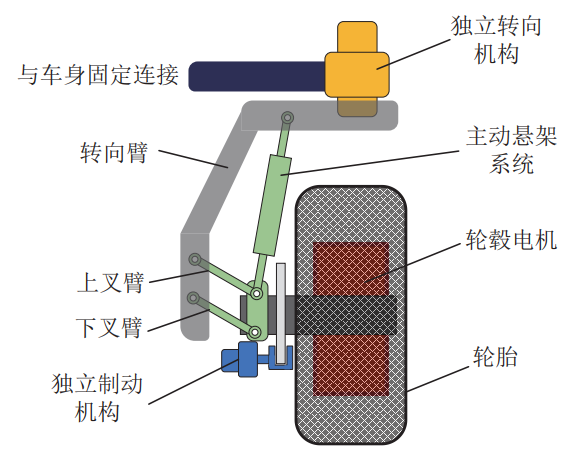
图 6 驱动 - 制动 - 转向 - 悬架一体化电动轮结构原理
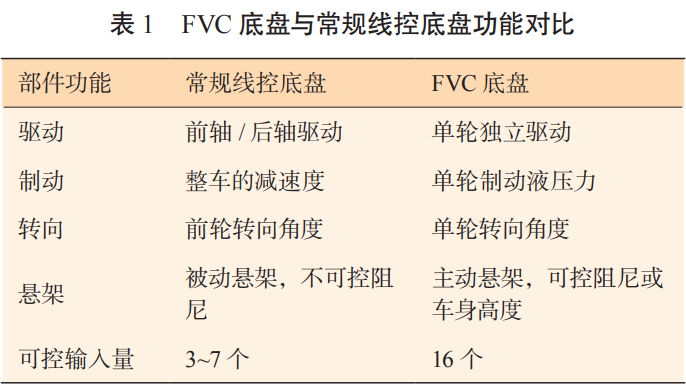
全矢量控制(FVC)汽车是典型的过驱动系统:每个车轮都具有驱动、制动、转向和悬架 4 个独立的操控部件,对于常见的四轮车辆系统,共有 16 个可控输入,涵盖了车辆的最大独立输入集合,即可以实现 12个独立车轮作用力的调控。FVC 汽车增加可控输入后, 一方面可以扩展整车动力学可控范围,减少汽车多个性能指标之间的相互制约,提高多目标优化的理论上限; 另一方面,各功能的执行器之间可以形成交叉冗余的互补机制,保证车辆在各种部件失效工况下的安全性。
FVC 汽车的主要功能集中在车辆底盘上,因此需要突破常规智能汽车线控底盘的架构,设计新型的全矢量控制线控底盘(简称 FVC 底盘)架构及其功能实现的方式。本团队提出的基本架构示意如图 7 所示。4 个车轮可以独立进行驱动、制动、转向和悬架调节的电动轮,且具备独立的电子电控系统。FVC 底盘动力学域控制器作为整个底盘的主控模块,负责整车的动力学控制和 4 个电动轮的动态协调。
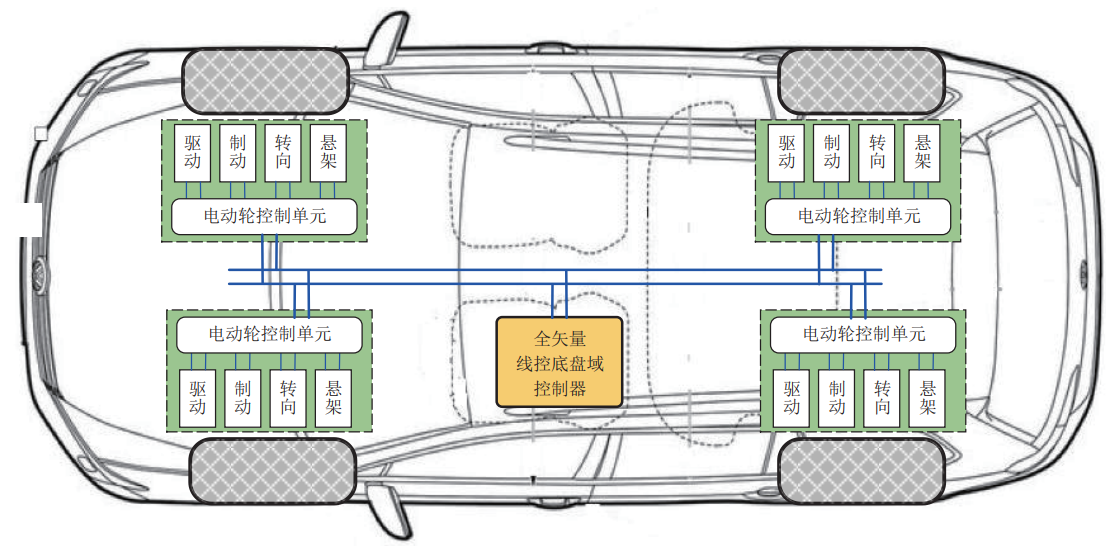
图 7 汽车全矢量控制线控底盘的基本架构
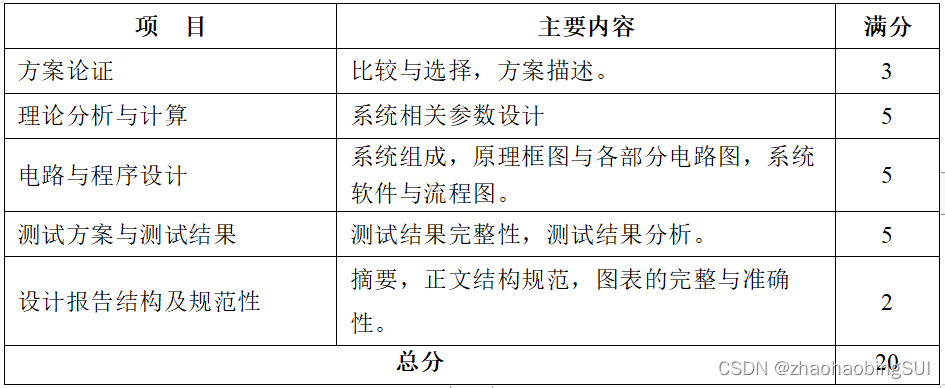
FVC 底盘与目前智能汽车采用的常规线控底盘的功能及其实现方式的对比总结于表 1。
3 底盘动力学域控制技术
智能汽车技术是当前国际竞争焦点,是中国实现汽车强国和交通强国的关键领域。底盘控制执行技术是智能汽车的基础,需要解决底盘多执行器协调控制、执行等关键技术难题,该问题一直以来都是国际汽车行业的难题。本节针对底盘集成协调控制发展到底盘动力学域控制技术历程中的控制架构、协调控制策略等关键问题展开综述,然后详细介绍作者团队率先提出的智能汽车底盘动力学域控制概念。
3.1 底盘集成控制架构研究
当前车辆各功能控制系统均针对某一车辆性能指标设计,底盘的多个电控部件在车辆行驶过程中相互影响、相互制约。因此,整车性能提升需要底盘各个执行部件的协调作动。自 20 世纪 80 年代开始,汽车产业各界开始关注车辆动力学集成控制的问题,如德国德尔福、博世等知名底盘零部件企业研发集成安全技术。
近年来,各国学者和各大汽车零部件厂商针对底盘集成控制架构展开广泛地研究,可分类为底盘分散式控制架构、集中式控制架构以及分层监督式控制架构。分散式架构基于车载通讯进行底盘传感器信号共享和联合控制,其特点为简单可靠,不过无法适用于底盘部件多、复杂度高的情况。早期,日本 Nissan 公司推出的 ARC-X 车型、日本 Toyota 公司设计的FXV-II 车型均采用分散式架构实现底盘子系统的集成控制。集中式架构由特定集中控制器接收处理所有传感器信号、统一优化控制各底盘执行器, 其特点为集成程度高、考虑车辆全局优化,其可靠性、灵活性会随底盘复杂度高而降低。基于集中式架构, One E 等设计了四轮转向和四轮驱动的协调控制器;M. Salman 等以及 M. Nagai 等研究了直接横摆力偶矩控制和后轮转向集成控制方法。分层监督式控制架构通过全局优化层进行目标集优化和底盘解耦控制与分配,执行控制层基于全局优化层指令控制执行器作动。吉林大学张家旭基于分层监督式控制架构提出底盘集成非线性鲁棒控制方法。
中国知名科研院所也在底盘集成控制架构方面开展了深入研究,例如:上海交通大学喻凡团队以自上而下的策略对转向、驱动和制动进行集成控制;同济大学余卓平团队研究了 6 层阶梯式集成架构;合肥工业大学陈无畏团队提出底盘集成的分层协调控制; 江苏大学陈龙团队提出基于多智能体理论的底盘集成技术。
3.2 底盘协调控制策略
各国学者针对底盘协调控制策略也开展了大量的研究工作并取得了很多成果,可大致分为基于线性控制理论分析、基于非线性控制方法和基于智能控制算法的 3 类底盘协调控制策略。利用线性二次最优调节、增益规划等线性控制方法,M. HARADA 等对底盘主动悬架和四轮转向进行协调控制提升车辆动力学稳定性;O. Sename 等对底盘制动系统、转向系统和悬架系统进行全局协调控制。
车辆在极限工况下呈现很强的动力学非线性特性, 一些学者使用滑模控制、非线性鲁棒控制、非线性模型预测控制等非线性控制方法进行底盘动力学的协调控制:澳大利亚学者 E. Mousavinejad 等设计协调控制底盘转向系统和制动系统的具有有限时间收敛特性的终端滑模控制器;清华大学季学武等研究了非线性底盘集成鲁棒控制策略;瑞典 P. Falcone、美国加州伯克利大学 E. H. Tseng 等基于模型预测控制理论提出了复杂四轮车辆动力学模型的非线性模型预测控制方法实现了车辆侧向动力学稳定性协调控制;吉林大学郭孔辉团队考虑车辆簧上质量和车轮的动力学状态建立非线性动力学模型设计了主动转向和主动制动的非线性模型预测协调控制方法;美国密歇根大学的 PENG Huei 教授设计了基于非线性规划方法的底盘集成控制系统并采用最坏状态估计方法对其进行改进和评价。
以模糊逻辑控制、神经网络算法为代表的智能控制方法不依赖于车辆动力学建模,近年来在底盘协调控制领域逐渐被广泛应用。基于模糊逻辑优化出各子系统的权重系数进而实现底盘的协调控制。W. Y. Wang 等考虑模型不确定性,通过递阶 T-S 模糊神经网络方法在线逼近模型不确定性,并且基于李雅普诺夫稳定性理论设计制动与转向系统的协调控制算法提高车辆制动性能。合肥工业大学的陈无畏等利用 BP 神经网络算法设计车辆纵向、垂向、侧向动力学解耦机制,基于 PD 算法实现转向、制动和悬架协调控制。
随着智能汽车技术发展,各种智能驾驶辅助功能应运而生并被广泛研究,例如自适应巡航跟车、自动紧急刹车、车道保持系统等,该问题也引起众多学者的广泛关注。清华大学李克强团队针对该多目标优化问题进行了深入研究,张德兆提出弯道自适应巡航系统保证车辆弯道行驶时动力学稳定性、跟车性能;清华大学李升波深入研究了多目标综合优化的自适应巡航控制方法。
3.3 面向智能汽车的底盘动力学域控制
智能化为汽车产业带来颠覆性变革,汽车电子电气架构也面临颠覆性变革,由分布式逐渐向域集中式甚至中央计算式进化,以解决智能汽车底盘信息安全, 高动态、高复杂交通环境下安全稳定运行等瓶颈难题。
针对上述智能汽车底盘控制问题,作者团队率先提出了面向智能汽车的底盘动力学域控制概念,发明了底盘动力学域控制架构:首先对当前底盘各部件传感器进行信号融合;通过全局动力学状态观测、多自由度动力学建模,探明车辆动力学模型的精确解算机制; 在此基础上,精确量化智能驾驶过程中车辆安全稳定运行边界条件,实现底盘域反馈至智能决策层车辆运行与预瞄动力学状态、运行量化条件等信息,为智能汽车构建出类经验驾驶员视角;通过驾驶员意图识别、底盘多目标多系统综合优化,进行各个部件的协调控制;由底盘各个作动器执行,如图 8 所示。
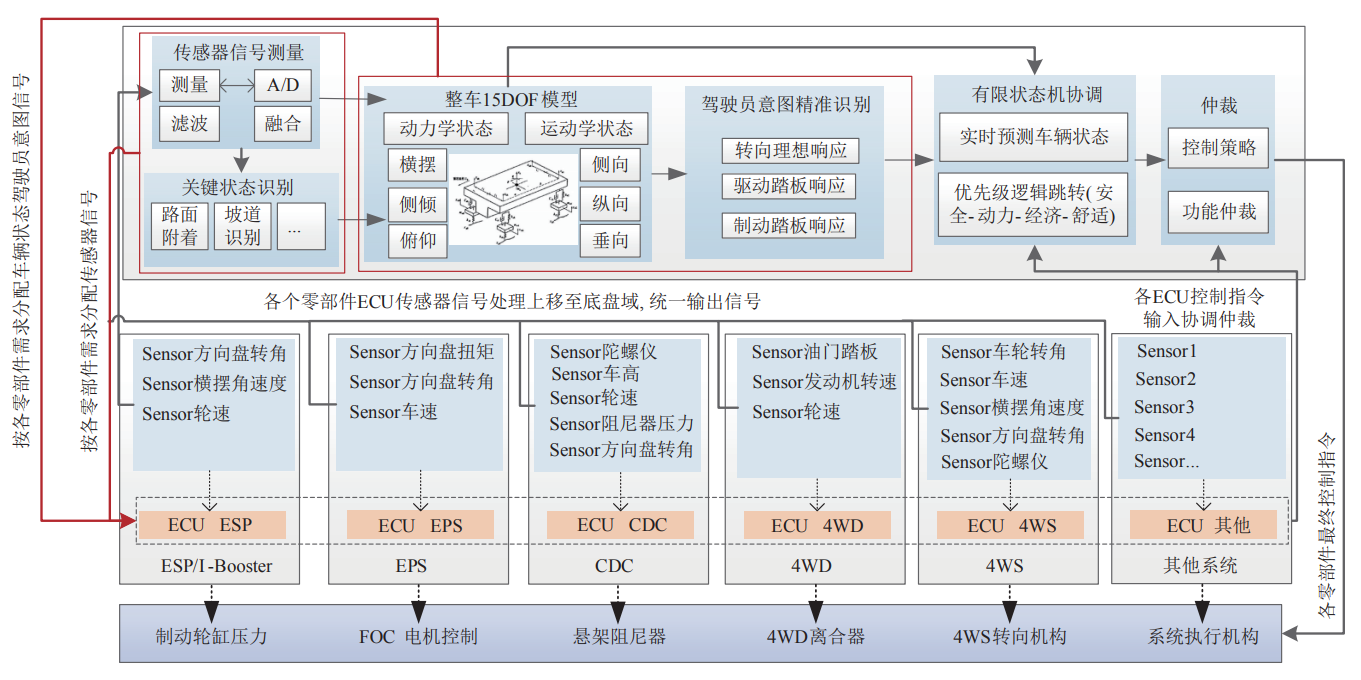
图 8 面向智能汽车的底盘动力学域控制架构
多自由度动力学模型的精确解算与预瞄是车辆进行前馈控制、提升车辆动力学性能的基础,也是底盘动力学域控制技术的关键之一。需要综合轮速传感器、惯性测量单元、方向盘转角等底盘传感器信号,实现 4 个车轮各向轮胎力、动力学状态的精确观测,通过数据融合处理后构建 15 自由度车辆动力学模型并进行精确解算。作者团队设计一种轮胎力的自适应统一观测方法、车身侧偏角融合观测方法、路面附着系数估计算法, 构建全工况车辆动力学状态获取体系,在此基础上,有望解决智能汽车在高复杂、动态不确定性交通环境下运行时动力学模型精确解算预瞄、稳定边界量化的难题,为智能驾驶提供类经验驾驶员量化感知视角。
底盘动力学稳定性是智能驾驶控制指令执行、车辆安全稳定运行的关键。针对复杂不确定性交通环境下各项智能驾驶功能潜在的动力学失稳危险,作者团队提出了基于模型预测控制的紧急刹车避障与动力学稳定性协调控制策略、自适应巡航跟车与直接横摆力偶矩控制集成方法;进一步提出了基于主动转向和主动制动的 H 鲁棒多系统协调控制器,有望解决复杂不确定性交通环境下智能汽车安全稳定运行瓶颈难题。这样,通过底盘动力学域控制对底盘各执行器的多目标多系统优化协调控制,实现底盘域与执行器数据交互,将底盘各复杂执行器变成标准零件,极大降低底盘核心零部件高昂开发、匹配、测试费用。
4 底盘线控与动力学域控制展望
4.1 面向智能汽车的汽车动力学应用展望
车辆动力学已历经上百年的发展历史,各个方向都得到了很大的发展。面对未来的智能新能汽车,建议在如下3 个方面在汽车动力学领域开展更进一步的工作,使之得到更有效的应用。
1)重视整车动力学在智能车辆运动规划中的研究,尤其是高速交通环境下的车辆轨迹规划问题一定要结合车辆动力学特性甚至是非线性区特性,从而在保证安全的前提下得到更加准确的运动轨迹。
2)对于传统车辆的重要参数估算,可以借助于智能车辆中先进传感器的优势,开发适合于现代智能车辆的参数估算体系,充分利用从自身传感器与智能网联得到的信息来估计当时时刻以及未来时刻的重要参数以及变化趋势,从而为车辆的精准控制提供有力的支撑。
3)随着车辆不断增多,道路工况变越发复杂,不同的行驶工况往往需要不同的控制模式,单一动力学控制方法难以使得车辆的各项性能都能达到最优状态。应开发多模式动力学控制方法和切换机制,以适应多工况动力学特性,并在一定层面达到加权最优状态。
4.2 全矢量控制线控底盘发展
全矢量控制线控底盘具有诸多运动学和动力学优点,可以在以下3 个方面深入研究。
1)固有安全的全矢量控制线控底盘架构与功能实现。设计新型的全矢量控制线控底盘架构及其功能实现的方式,研究整个系统的拓扑结构、功能完整性, 各部件之间的功能相容性,控制单元之间的通讯方式、主从关系等。
2)电动轮的动力学分析及与整车的动力学耦合机制。集成驱动、制动、转向、悬架的多功能电动轮是实现全矢量控制(FVC)汽车的动力学控制的执行基础, 因此需要探究电动轮在多个执行器作用下的动力学过程,以及电动轮与整车之间的动力学耦合机制。
3)全矢量控制线控底盘的域控制技术与失效冗余机制。FVC 底盘的底层执行器繁多,系统复杂度、集成度高,既需要研究底盘域的分层协调控制技术,又考虑部件故障或失效的情况,建立 FVC 汽车的失效冗余机制,保证车辆控制系统的功能安全。
4.3 面向智能汽车的底盘动力学域控制展望
智能化、大数据网联化给底盘动力学域控制带来新的发展契机。其一,底盘传感器类型繁多、信号模式与处理方法各异,且大量传感器信号汇入控制器对信号实时处理提出更高要求,需要研究多源传感器信号实时处理、校验与解算理论。其二,车辆及轮胎动力学呈现复杂非线性特性,需要更进一步地深入研究车辆复杂动力学模型精确解算机制,逼近真实车辆动力学状态,有望支撑智能汽车直接前馈预瞄控制。其三, 借助于网联大数据信息,研究复杂交通场景下底盘动力学域控制对车辆动力学状态的精确感知与预瞄技术, 探索车辆运行动力学稳定边界精确量化机制,为智能汽车提供量化的类驾驶员视角,消除高复杂、动态交通环境的不确定性。
5 结论
本文对汽车底盘线控执行与动力学控制关键技术重大意义与发展历程进行了简单概述,从汽车动力学与控制、底盘线控执行技术研究与发展、底盘动力学域控制技术 3 个方面进行了深入全面的归纳和分析。总体来说,长期以来汽车产业各界针对底盘线控执行与动力学控制相关关键技术开展了广泛深入的研究工作, 取得了大量研究成果。对汽车的动力学控制技术的发展进行了展望,指出:在智能化、网联化推动下,为了进一步提升车辆的综合性能,汽车的动力学控制技术将向着更加精确的线控执行系统、全矢量控制的线控底盘和底盘动力学域控制等关键技术发展。
END



![[电动智能汽车-7]:汽车CAN总线详解](https://img-blog.csdnimg.cn/img_convert/b31b70005e5653bf7e652972f2572e3d.png)