2022深圳杯C自动驾驶电动物料车换电站选址及调度方案
为了实现我国在 2030 年前“碳达峰”、在 2060 年前“碳中和”的目标,在物料运输中使用环保的自动驾驶电动车是发展趋势。在制订电动车调度方案时,必须考虑充、换电池的时间成本,从而提出了新的车辆运输选址及调度问题。
问题 1 一批自动驾驶电动物料车将物料从 P 点运送到 D 点,然后空载返回,
如此循环往复运送物料。要求建立数学规划模型,在 P 点与 D 点之间确定一个双向同址(像高速的休息站一样)的换电站位置,以及对应的车辆和电池组调度方案,极大化指定时间段内运送物料量,满足资源约束与电池运行方式约束。根据附录所给的数据,求解规划模型,给出换电站位置,并给出在 1000 小时中运送的物料量,所使用车辆、电池组数量和车辆及其各电池组的具体调度方案。
问题 2 在问题 1 中,将建站条件更改成为“在 P 点与 D 点之间每个方向分别确定一个换电站位置”,其他条件与任务与问题 1 相同。
问题 3 考虑峰谷电价、购置电池组、建设充、换电站等成本,制定保证每日最低运输量,3 年结算周期投资运行成本最低的建站及电池组调度方案。根据附录所给的数据(缺省的数据自行补充),给出具体算例。问题 4 对多个取料点、单个卸货点,研究上述换电站选址及车辆-电池组调度问题。
附录:数据格式(限定)
算例数据在下列格式限定下自行编制,决赛前将发布统一测试算例数据。
(1) P 点到 D 点:里程 10 km,双向单车(轨)专用道,车距不小于 200 m
(2) 车辆:125 辆,速率 60 km/h, 每车额定装配 6 个电池组,初始位于换电站空载状态,且每个车载电池组的 SoC(荷电状态)都是 100%
(3) 电池:900 组,单个电池组独立计量,车载 6 个电池组一致消耗电量,空载车辆每行驶 3 分钟每个电池组的 SoC 都减少 1%,载货车辆每行驶 2 分钟每个电池组的 SoC 都减少 1%,车载电池组的 SoC 位于区间[10%,25%]时方可更换,备更换电池组的 SoC 为 100%
(4) 耗时:每更换一个电池组耗时 20 秒,每个电池组更换下来后充电、检测进入备用状态总耗时 3 小时,装卸货每次各需要 1 分钟
(5) 价格:峰谷电价,换电站地价,充电速率及充电桩造价,自动换电池设备价格,电池价格,车辆价格。
模型的建立与求解分析:
首先考虑这个题是从换电站到P点到D点再到P点直到电池容量到10%至25%的时候,到换电站进行电池更换
这里可以画一个线路图
S双行道的长度为10km也就是10000m
每两车距大于等于200m,什么意思?
在不考虑车长情况下 公路上最多奔驰100辆电车
题中说电池:900 组,单个电池组独立计量,车载 6 个电池组一致消耗电量。
我这智商余额不足,我不考虑6个电池分批充电分批换电池的情况了,我直接在模型的假设中写:假设电车换电池6个电池组一起换,忽略单个电池单独换对于总体货载量的影响。
又是电池组合分批换电又是考虑换电站的位置、货运总量最大、时间1000h=60000min内,6个电池用到贴近10%一起换和分批换的区别我知道会影响整体900组电池的使用率,但这个电池换电方案不好算。这题的意思就是让你拿整数规划和线性规划的组合,道上跑着100辆电车然后其余的电池尽量没有浪费都在充电,然后这车跑的快到10%的时候电池正好充完了,以此循环往复,问你换电站建哪?换电池怎么换?能达到货运量最大。
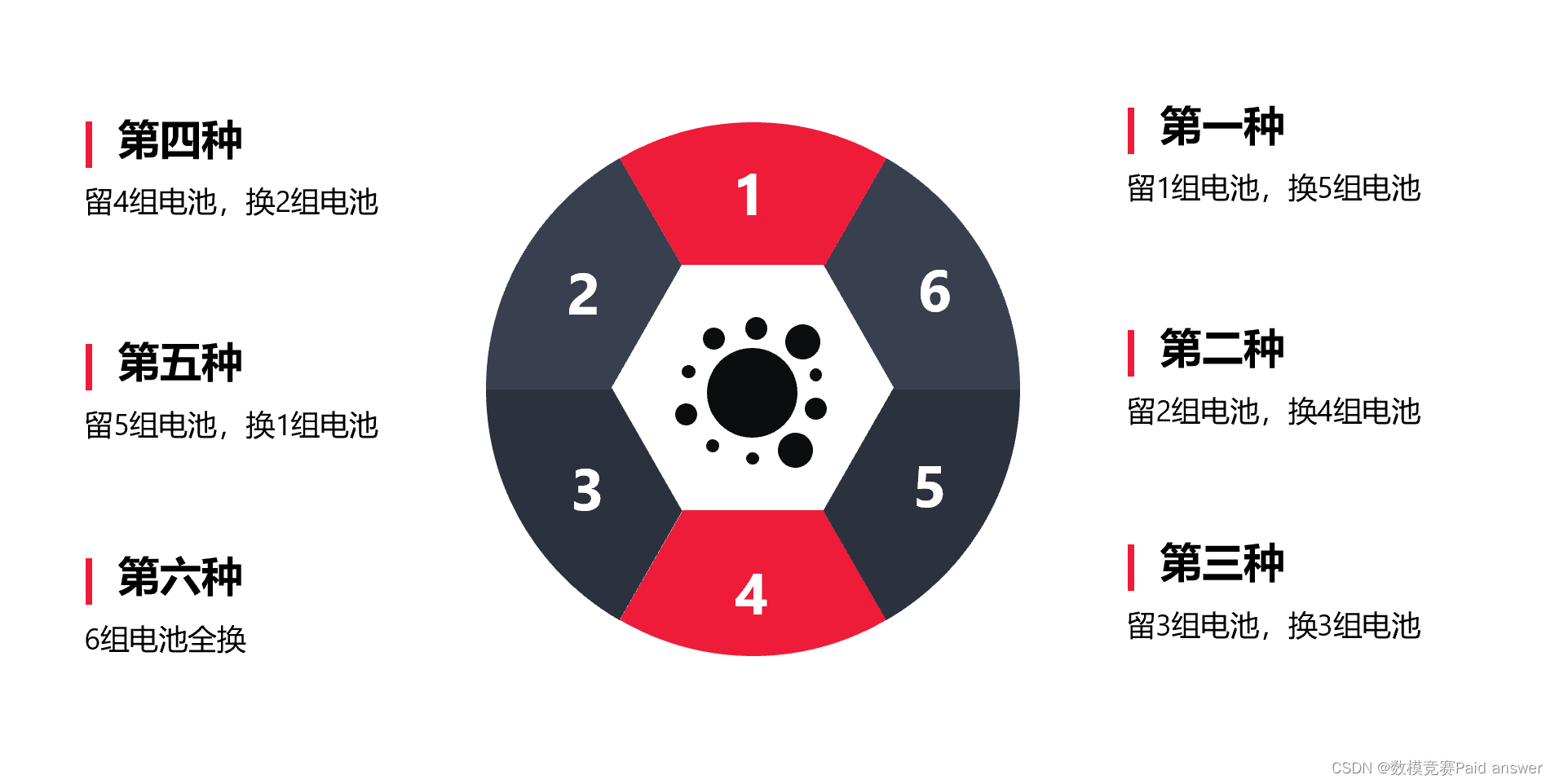
我说一下为什么电站位置好算而电池换电分配方案不好算,这是因为6块电池你如果换电池的方案的话有C6选1也就是说6种电池换电方案,然后你通过对比或是智商碾压得出最优的电池换电方案,为什么是6种方案呢?因为25%-10%=15%的电量能跑一来回加一个去或者回的电量,但是你还得保证有去换电站的电量剩余,所以说第二趟你去不了了,只能老实换电,懂了么。
最终结果
第一问最后你确定换电站是在P去D的5km处建立换电站。至于电池换电方案,你猜猜你就合计怎么整电池利用效率最大?运输量之与车数、电车到达P的次数有关,而电池影响车数和到达P的次数,亲爱的读者你转过来这个弯了么?
第二问最后结果是在去和回的20/3km处建换电站。
第三问结果需考虑换点的时间点 白天怎么换 夜晚怎么换 使用工业用电时间最低价格 与最高价格的换电策略方案
第四问结果需考虑排队论算法
思路终于完成了 欢迎打扰
以上仅代表个人对于该题的理解
程序代码示例:
import math # 导⼊模块
import random # 导⼊模块
import pandas as pd # 导⼊模块 YouCans, XUPT
import numpy as np # 导⼊模块 numpy,并简写成 np
import matplotlib.pyplot as plt
from datetime import datetime
# ⼦程序:定义优化问题的⽬标函数
def cal_Energy(X, nVar, mk): # m(k):惩罚因⼦,随迭代次数 k 逐渐增⼤
p1 = (max(0, 6*X[0]+5*X[1]-60))**2
p2 = (max(0, 10*X[0]+20*X[1]-150))**2
fx = -(10*X[0]+9*X[1])
return fx+mk*(p1+p2)
# ⼦程序:模拟退⽕算法的参数设置
def ParameterSetting():
cName = "funcOpt" # 定义问题名称 YouCans, XUPT
nVar = 2 # 给定⾃变量数量,y=f(x1,..xn)
xMin = [0, 0] # 给定搜索空间的下限,x1_min,..xn_min
xMax = [8, 8] # 给定搜索空间的上限,x1_max,..xn_max
tInitial = 100.0
tFinal = 1
alfa = 0.98
meanMarkov = 100 # Markov链长度,也即内循环运⾏次数
scale = 0.5 # 定义搜索步长,可以设为固定值或逐渐缩⼩
return cName, nVar, xMin, xMax, tInitial, tFinal, alfa, meanMarkov, scale
# 模拟退⽕算法
def OptimizationSSA(nVar,xMin,xMax,tInitial,tFinal,alfa,meanMarkov,scale):
# ====== 初始化随机数发⽣器 ======
randseed = random.randint(1, 100)
random.seed(randseed) # 随机数发⽣器设置种⼦,也可以设为指定整数
# ====== 随机产⽣优化问题的初始解 ======
xInitial = np.zeros((nVar)) # 初始化,创建数组
for v in range(nVar):
# xInitial[v] = random.uniform(xMin[v], xMax[v]) # 产⽣ [xMin, xMax] 范围的随机实数
xInitial[v] = random.randint(xMin[v], xMax[v]) # 产⽣ [xMin, xMax] 范围的随机整数
# 调⽤⼦函数 cal_Energy 计算当前解的⽬标函数值
fxInitial = cal_Energy(xInitial, nVar, 1) # m(k):惩罚因⼦,初值为 1
# ====== 模拟退⽕算法初始化 ======
xNew = np.zeros((nVar)) # 初始化,创建数组
xNow = np.zeros((nVar)) # 初始化,创建数组
xBest = np.zeros((nVar)) # 初始化,创建数组
xNow[:] = xInitial[:] # 初始化当前解,将初始解置为当前解
xBest[:] = xInitial[:] # 初始化最优解,将当前解置为最优解
fxNow = fxInitial # 将初始解的⽬标函数置为当前值
fxBest = fxInitial # 将当前解的⽬标函数置为最优值
print('x_Initial:{:.6f},{:.6f},\tf(x_Initial):{:.6f}'.format(xInitial[0], xInitial[1], fxInitial))
recordIter = [] # 初始化,外循环次数
recordFxNow = [] # 初始化,当前解的⽬标函数值
recordFxBest = [] # 初始化,最佳解的⽬标函数值
recordPBad = [] # 初始化,劣质解的接受概率
kIter = 0 # 外循环迭代次数
totalMar = 0 # 总计 Markov 链长度
totalImprove = 0 # fxBest 改善次数
nMarkov = meanMarkov # 固定长度 Markov链
# ====== 开始模拟退⽕优化 ======
# 外循环
tNow = tInitial # 初始化当前温度(current temperature)
while tNow >= tFinal: # 外循环kBetter = 0 # 获得优质解的次数
kBadAccept = 0 # 接受劣质解的次数
kBadRefuse = 0 # 拒绝劣质解的次数
# ---内循环,循环次数为Markov链长度
for k in range(nMarkov): # 内循环,循环次数为Markov链长度
totalMar += 1 # 总 Markov链长度计数器
# ---产⽣新解
# 产⽣新解:通过在当前解附近随机扰动⽽产⽣新解,新解必须在 [min,max] 范围内
# ⽅案 1:只对 n元变量中的⼀个进⾏扰动,其它 n-1个变量保持不变
xNew[:] = xNow[:]
v = random.randint(0, nVar-1) # 产⽣ [0,nVar-1]之间的随机数
xNew[v] = round(xNow[v] + scale * (xMax[v]-xMin[v]) * random.normalvariate(0, 1))
# 满⾜决策变量为整数,采⽤最简单的⽅案:产⽣的新解按照四舍五⼊取整
xNew[v] = max(min(xNew[v], xMax[v]), xMin[v]) # 保证新解在 [min,max] 范围内
# ---计算⽬标函数和能量差
# 调⽤⼦函数 cal_Energy 计算新解的⽬标函数值
fxNew = cal_Energy(xNew, nVar, kIter)
deltaE = fxNew - fxNow
# ---按 Metropolis 准则接受新解
# 接受判别:按照 Metropolis 准则决定是否接受新解
if fxNew < fxNow: # 更优解:如果新解的⽬标函数好于当前解,则接受新解
accept = True
kBetter += 1
else: # 容忍解:如果新解的⽬标函数⽐当前解差,则以⼀定概率接受新解
pAccept = math.exp(-deltaE / tNow) # 计算容忍解的状态迁移概率
if pAccept > random.random():
accept = True # 接受劣质解
kBadAccept += 1
else:
accept = False # 拒绝劣质解
kBadRefuse += 1
# 保存新解
if accept == True: # 如果接受新解,则将新解保存为当前解
xNow[:] = xNew[:]
fxNow = fxNew
if fxNew < fxBest: # 如果新解的⽬标函数好于最优解,则将新解保存为最优解
fxBest = fxNew
xBest[:] = xNew[:]
totalImprove += 1
scale = scale*0.99 # 可变搜索步长,逐步减⼩搜索范围,提⾼搜索精度
# ---内循环结束后的数据整理
#
pBadAccept = kBadAccept / (kBadAccept + kBadRefuse) # 劣质解的接受概率
recordIter.append(kIter) # 当前外循环次数
recordFxNow.append(round(fxNow, 4)) # 当前解的⽬标函数值
recordFxBest.append(round(fxBest, 4)) # 最佳解的⽬标函数值
recordPBad.append(round(pBadAccept, 4)) # 最佳解的⽬标函数值
思路终于完成了 欢迎打扰