摘要:设计了一个自动往返和智能控制的小车。采用MSP430F149为核心芯片,选用双全桥驱动芯片作为小车电机驱动,利用PWM技术动态控制电动机的转速,红外线光电传感器检测标识线,U型红外光电传感器测量路程。MCU判断和处理各种传感器传回的信息,向电机驱动器发出指令,控制小车在往返过程中实现自动加速、限速、减速、刹车、倒车和在液晶显示器上显示行驶时间,行驶路程等相关数据。
智能小车,是一种以汽车电子为背景,涵盖智能控制、模式识别、传感技术、电子电气、计算机、机械等多学科的科技创意性设计。全国电子大赛和省内电子大赛几乎每次都有智能小车这方面的题目,全国各高校也都很重视该题目的研究,可实现循迹、避障、检测贴片、寻光入库、避崖等基本功能。
1 总体方案
设计一个能自动往返于起跑线与终点线间的小汽车,从起跑线出发到达终点线后停留10 s,然后自动倒车返回起跑线。在要求的跑道范围内完成加速、减速、限速、刹车、倒车等功能。停车后显示一次往返的时间和路程。
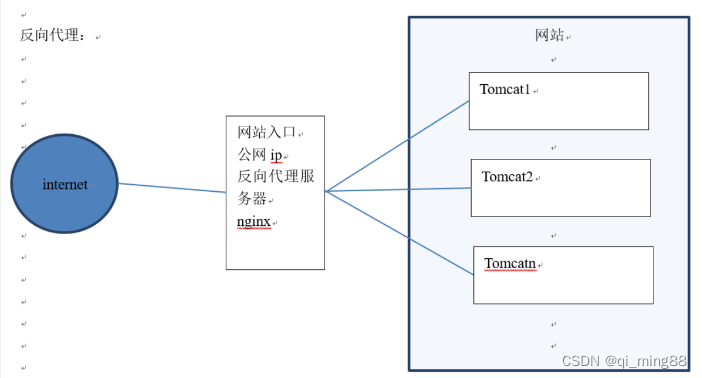
电路设计原理框图如图1所示,可分为MSP430F149、电路驱动模块、黑线检测模块、测速测距模块,显示模块等几部分。
采用MSP430F149为核心芯片,选用双全桥驱动芯片L298作为小车电机驱动,利用PWM技术动态控制电动机的转速,红外线光电传感器(LTH1550)检测标识线,U型红外光电传感器测量路程,在液晶显示器上显示行驶时间、行驶路程等相关数据。微处理器主要处理光电传感器传回的地面检测标志信号和U型传感器传回的检测路程信息,向电机驱动器发出指令,控制小车的加速、减速、限速、刹车、倒车等状态,在液晶显示器上显示行驶时间、行驶路程等相关数据。
2 各单元模块设计
2.1 微处理器模块