D-H建模原理推导
1.1 基本思路
D-H建模具体思路是先分别在每个关节加建立关节坐标系,确定关节刚性连杆参数,再依次将关节变换联系起来,计算出末端执行器相对于参考坐标系的变换关系得到坐标变换矩阵,从而建立机械臂运动学方程。关于D-H建模首先要会以下知识:
(1)会齐次坐标的变换。
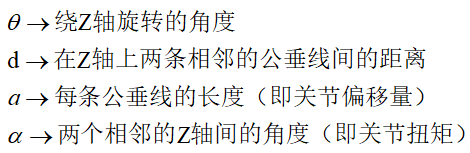
(2)知道D-H建模中 ![]() 分别对应连杆的什么地方。
分别对应连杆的什么地方。
(3)对已知连杆机构,会列DH参数表。
(4)会列最终坐标变换的等式,建立末端执行器与基座的关系。
1.2 齐次坐标变换
平移: ![]()
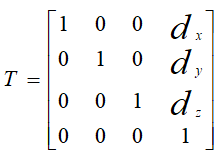
T为坐标系的平移矩阵。
旋转(变换矩阵):
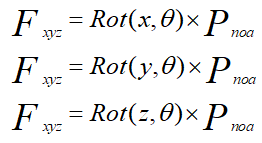
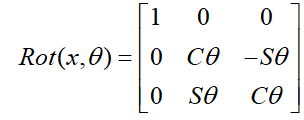
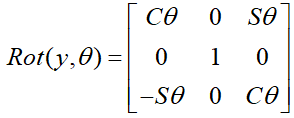
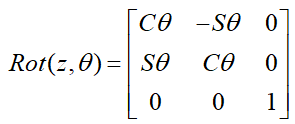
即为变换矩阵。
2 D-H建模推导
2.1 确定关节坐标系的X轴和Z轴
(1)确定Z轴:关节轴线及关节转向,采用右手法则,确定Z;
(2)确定原点:如果两个相邻轴线不相交则公垂线与轴线的交点为原点;
如果平行时,原点的选择应偏置为0;
如果重合,则原点偏置为0;
如果相交,则交点为原点;
(3)确定X轴:
如两轴线不相交,则X与公垂线重合,指向为从i-1到i;
如两轴线相交,则X是两轴线所成平面的法线;
如两轴线重合,则X与轴线垂直且使其他连杆参数为0;
(4)确定Y轴:右手法则确定Y;
【注】请将当前关节标号定位为i-1,下一个关节定位为i,有些时候将当前关节定位为i,下一个关节定位为i+1这样后续的分析中下标都会不一样注意区分。
2.2 四个基本概念

(1)连杆i-1的长度。是指图中![]() 所示的距离,表示i-1关节的轴线与i关节的轴线距离。
所示的距离,表示i-1关节的轴线与i关节的轴线距离。
(2)连杆i-1的扭角。是指图中![]() 所示的角度。空间两条直线即使不相交也存在夹角,那么扭角
所示的角度。空间两条直线即使不相交也存在夹角,那么扭角![]() 就是关节i-1与关节i轴 线的夹角。
就是关节i-1与关节i轴 线的夹角。
(3)连杆i相对于连杆i-1的偏置![]() 上图中的
上图中的![]() 就是偏置,由上图中i关节的轴线,它与前后两个关节轴线各有一条公垂线(红 线)这两条公垂线的距离就是连杆i相对于连杆i-1的偏置。
就是偏置,由上图中i关节的轴线,它与前后两个关节轴线各有一条公垂线(红 线)这两条公垂线的距离就是连杆i相对于连杆i-1的偏置。
(4)关节角![]() 。连杆i相对于连杆i-1绕i轴的旋转角度,图中角
。连杆i相对于连杆i-1绕i轴的旋转角度,图中角![]() (其实是上图两条公垂线的夹角)。
(其实是上图两条公垂线的夹角)。
即就是:
2.3 坐标变换
假设现在位于本地坐标系![]() ,那么通过四步标准运动即可到达下一个本地坐标系
,那么通过四步标准运动即可到达下一个本地坐标系![]() 。
。
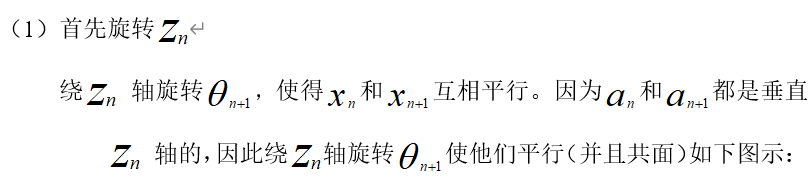







最终可以知道坐标变换的步骤为:旋转-平移-平移-旋转
总结:在n+1和n+2坐标间也严格遵守同样的运动顺序可以将一个坐标系变换到下一个坐标系。从参考坐标系开始可以从机器人基座,到第一个关节直到末端执行器。
2.4 D-H建模---坐标变换的矩阵表示
(1)在第一节推导的机器人运动学基础上,以矩阵形式来表示机器人关节和连杆的运动过程即可得到数学模型。由于所有变换都是相对于当前坐标系的(即相对于当前的本地坐标系来进行测量与执行的),因此所有的矩阵都是右乘。

通过右乘表示四个运动的四个矩阵就可以得到变换矩阵A,矩阵A表示了四个一次的运动,从而得到结果如下:

则可得:

上式中:![]() ,其中
,其中![]() 表示从关节n到关节n+1的变换。
表示从关节n到关节n+1的变换。
(2)推广到n个自由度:
在机器人的基座上,从第一个关节开始变换到第二个关节,再到第三个关节,再到……,直到末端执行器。把每个变换定义为![]() ,则可以得到多个变换矩阵。在整机器人的基座与手之间的总变换为:统一右乘。
,则可以得到多个变换矩阵。在整机器人的基座与手之间的总变换为:统一右乘。
![]()
其中n为自由度。
为了方便计算可以将关节连杆参数制作成表格如下:

即D-H建模推导完毕。
辛苦整理,希望点赞收藏谢谢!





