相关文章

机械臂D-H参数法分析
文章目录 前言连杆D-H参数法介绍D-H参数法的坐标变换矩阵特殊情况加实例分析方法总结 前言
笔者在看D-H参数法的时候对此方法的适用性产生了好奇,通过个人构思推导得出传统D-H参数表有时不适用的原因,并相出一种简洁的判断方法,列在文章最末…

J1800N-D2H主板升级bios,安装Fedora20,并搭建开发环境
 安装过程如下:以fedora20桌面版为例 准备工作:下载UtralSO用作安装盘的制作工具,下载win8.1,下载fedora20桌面版,在技嘉官网下载mb_utility_appcenter_soc.exe,mb_utility_atbios…

三维重建——D2HC-RMVSNet网络详解
前言
之前在做MVS的学习接触到了MVSNet,这钟基于深度学习的方法是目前的一个趋势,因此值得我花大功夫去研究一番。但是现在网上的资料很少,特别是中文的,能找到的一般就是MVSNet或者是R-MVSNet。 上周在排行耪上看见了d2hc网络&a…
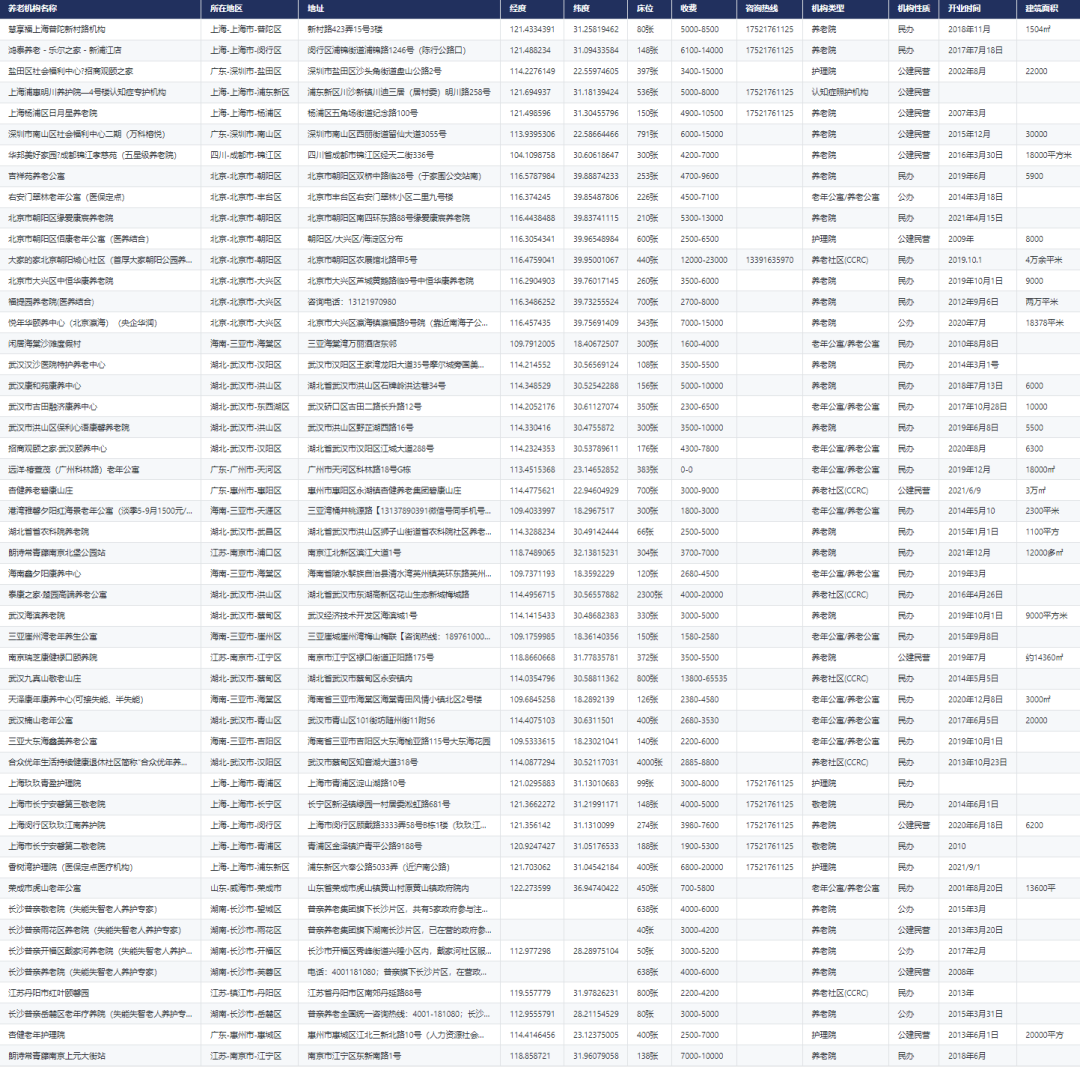
CnOpenData全国养老机构数据
一、数据简介 养老机构指为老年人提供集中居住和照料服务的机构,县级以上地方人民政府民政部门负责本行政区域内养老机构的指导、监督和管理。其他有关部门依照职责分工对养老机构实施监督。 与其他服务不同的是,养老服务是一种全人、全员、全程服务,养老…
第12章:SpringMVC执行流程
一、SpringMVC执行流程
1.SpringMVC常用组件
①、DispatcherServlet:前端控制器,框架提供。
作用:统一处理请求和响应,整个流程的控制中心,由它调用其他组件处理用户的请求
②、HandlerMapping:处理器映射器&#…
uniapp和springboot微信小程序开发实战:开发环境准备以及技术选型
文章目录 开发工具STSHBuilder X其他工具技术选型前端开发vueelementUI后端springbootmybatisplusJWT和shiro开发工具 STS
STS是开发springboot项目的利器,是Eclipse的一个版本,全称是SpringToolSuite STS下载地址
HBuilder X
下载地址
学计算机类专业要什么牌子笔记本,请问学计算机专业的大学生买什么牌子的笔记本比较合适...
宁宁是大卟點 回答数:2 | 被采纳数:46 2019-03-26 12:28:47 办公用途,平面设计类吃处理器的能力。游戏,3d设计类吃显卡能力。不管那种需求,内存容量都是需要有合理的选择(类如看机器是否支持扩展)。不管台式本子都一…
笔记本电脑购买指南与建议-知识点介绍
前言
刚进入学校的新生们一大笔开销就是买笔记本了,但是很多同学不知道电脑的配置怎么样,不清楚各种显卡,内存什么配置好,又不知道价位是否是同等价位当中性价比最高的,那么今天我们就简单介绍下笔记本的各种配置
1C…