webots
2024/9/25 15:24:42
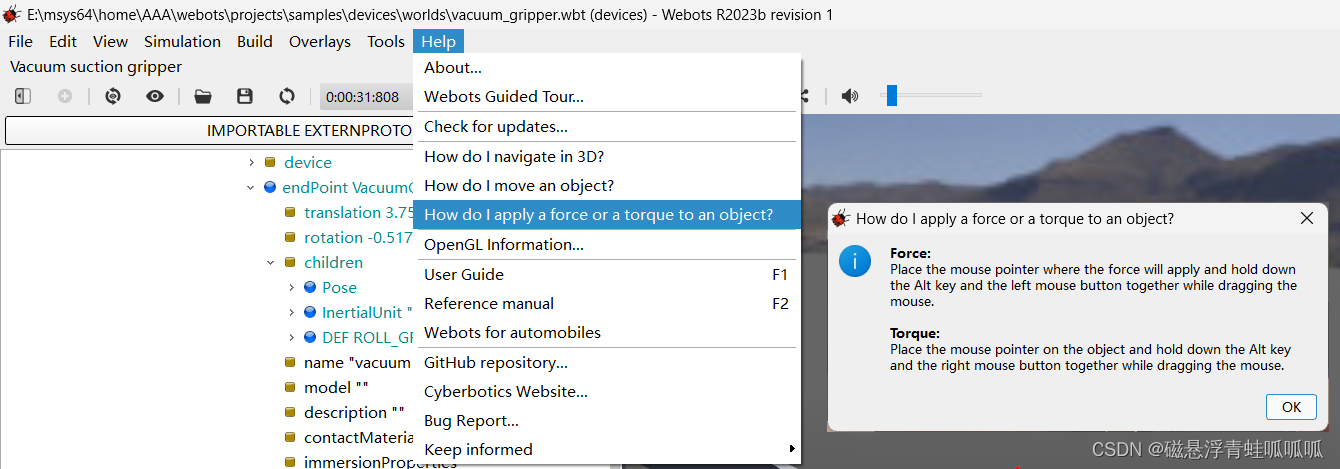
webots学习记录8:R2023b如何在某个零件上添加一个恒定的力(矩)
在webots安装路径下,从include\controller\c\webots\supervisor.h中可以看到如下定义:
void wb_supervisor_node_add_force(WbNodeRef node, const double force[3], bool relative);
void wb_supervisor_node_add_force_with_offset(WbNodeRef node, c…
ROS2高效学习第十章 -- ros2 高级组件其四之 webots
ros2 高级组件其四之 webots 1 前言和资料2 正文2.1 webots 引入和学习资料2.2 webots 安装以及样例测试2.3 自编写 webots_demo 3 总结 1 前言和资料
当前,在机器人仿真领域,有两大产品比较突出,一是来自 ros 社区的 gazebo,二是…
webots学习记录8:R2023b如何在某个零件上添加一个恒定的力(矩)
在webots安装路径下,从include\controller\c\webots\supervisor.h中可以看到如下定义:
void wb_supervisor_node_add_force(WbNodeRef node, const double force[3], bool relative);
void wb_supervisor_node_add_force_with_offset(WbNodeRef node, c…
ROS2高效学习第十章 -- ros2 高级组件其四之 webots
ros2 高级组件其四之 webots 1 前言和资料2 正文2.1 webots 引入和学习资料2.2 webots 安装以及样例测试2.3 自编写 webots_demo 3 总结 1 前言和资料
当前,在机器人仿真领域,有两大产品比较突出,一是来自 ros 社区的 gazebo,二是…
webots学习记录8:R2023b如何在某个零件上添加一个恒定的力(矩)
在webots安装路径下,从include\controller\c\webots\supervisor.h中可以看到如下定义:
void wb_supervisor_node_add_force(WbNodeRef node, const double force[3], bool relative);
void wb_supervisor_node_add_force_with_offset(WbNodeRef node, c…