1 前言和资料
当前,在机器人仿真领域,有两大产品比较突出,一是来自 ros 社区的 gazebo,二是从商业转向开源的 webots。通常情况下,ros 的学习者都会深入研究 gazebo,比如本人之前的 ROS高效进阶系列。但由于 webots 转向开源,加上 ros 的支持,影响力越来越大,ros2 humble 官方 Tutorials 也正式引入了 webots 的内容。
本文先介绍 webots 以及学习资料,然后安装并测试 webots,最后基于 ros2 humble 官方 Tutorials 中 webots 的内容,利用 webots 实现一个差速轮式机器人的运动仿真。
本文参考资料如下:
(1)Simulation-Webots
(2)其他资料见文章内容
2 正文
webots__8">2.1 webots 引入和学习资料
(1)webots 引入:webots 是来自瑞士的 Cyberbotics 公司(Cyberbotics 官网)推出的机器人仿真软件,旨在降低机器人技术开发的门槛,并加速从理论到实践的转化过程。该平台用户群体非常广泛,涵盖了教育、科研和工业界。2018年以前,webots 是一款商业软件,2018年12月以后,Webots作为开放源码软件在Apache 2.0许可下发布(webots github)。
(2)gazebo 和 webots 的比较:这里我推荐两篇博客,大家大致了解下他们的异同即可。本文不建议读者在这里花费太多时间,适当了解后,尽快学习才是王道!
第一,ROS仿真平台总结
第二,到底该用哪款神器来仿真我的机器人?
(3)webots 和 ros:webots 本身是一款独立的仿真软件,跟 ros 没有关系。后来,ros1 有了 webots_ros 软件包,ros2 有了 webots_ros2 软件包,从而打通了 ros 与 webots 之间的接口,使得两者之间可以顺利通信。本文我们将使用 webots_ros2 :webots_ros2 github
(4)webots 学习资料:这些资料都在 Cyberbotics 官网,有时会打不开,请多试几次。或者用翻墙梯子,体验会好很多。
第一,webots 入门手册 ,尤其是里面的 webots tutorials ,
补充:另外推荐 webots 中文系列教学博客,可供读者参考。
第二,webots 参考手册
第三,webots 自动驾驶仿真
(5)webots 学习路线:把上面的webots 学习资料按顺序学完,并动手实践。
webots__21">2.2 webots 安装以及样例测试
(1)webots 安装:由于 webots 是从商业转向的开源,因此安装非常简单,如下。本系列 ros2 文章的基础环境是 Ubuntu22.04 + ros2 humble,安装的 webots 版本是 webotsR2023b。
cd ~
# 先安装 webots_ros2
sudo apt-get install ros-humble-webots-ros2
# 启动机器臂样例,程序会自动查找 webots ,如果没有找到,则会询问你是否自动安装,如果yes,则默认安装在: ~/.ros/webotsR2023b/webots
ros2 launch webots_ros2_universal_robot multirobot_launch.py
# 设置 WEBOTS_HOME,方便查找安装位置
export WEBOTS_HOME=/home/ycao/.ros/webotsR2023b/webots
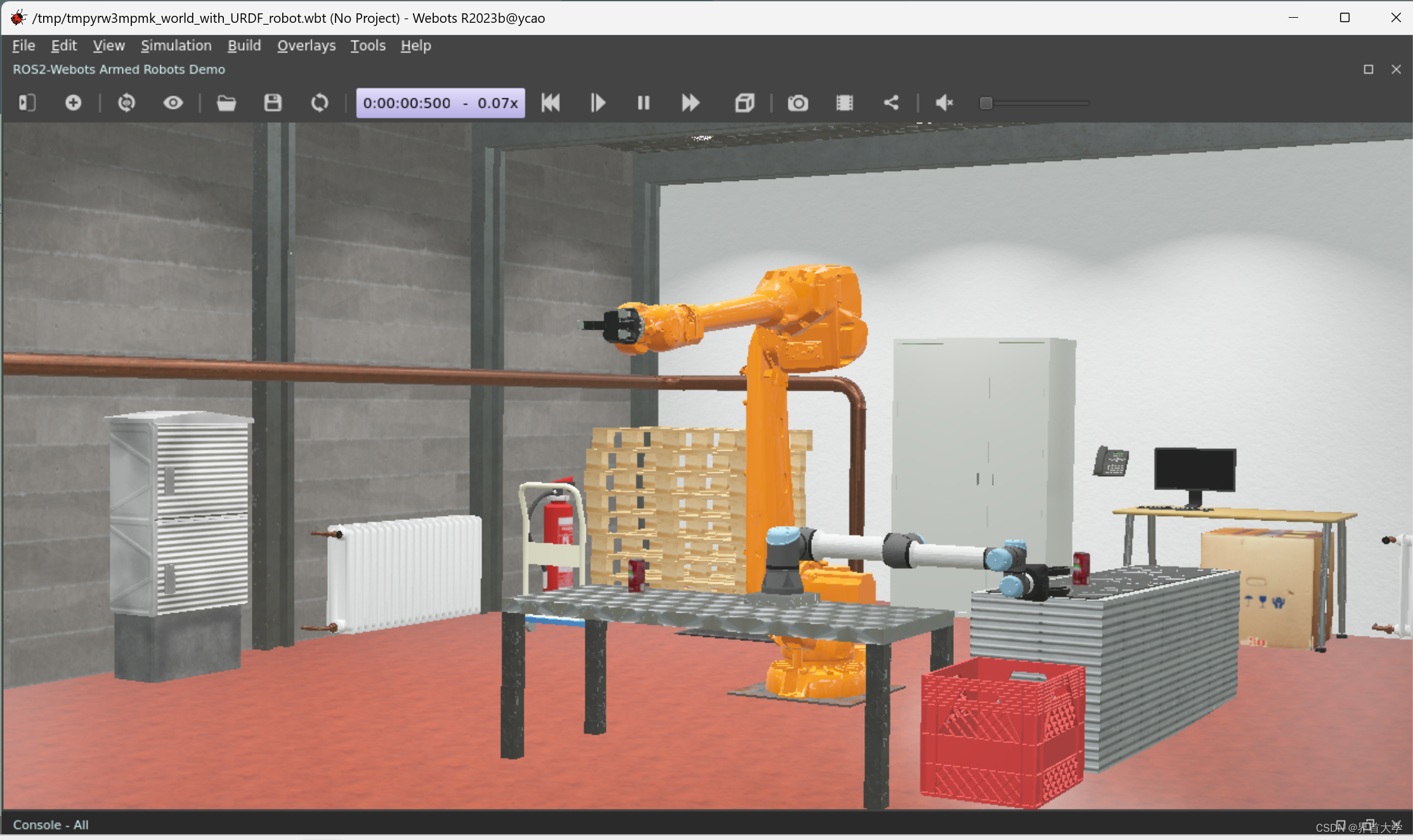
(2)在 webots_ros2 中,利用 webots 实现了多种机器人仿真,包括 TurtleBot3 ,Tesla Model3,详细内容见:webots_ros2 Examples
测试 TurtleBot3 :
# 启动 TurtleBot3 仿真环境
ros2 launch webots_ros2_turtlebot robot_launch.py
# 再开一个窗口,控制 TurtleBot3 在仿真屋子里活动
ros2 run teleop_twist_keyboard teleop_twist_keyboard

测试 Tesla Model3(怎么让车动起来,我没有详细研究,图也就不放了):
ros2 launch webots_ros2_tesla robot_launch.py
webots_demo_46">2.3 自编写 webots_demo
(1)创建 webots_demo 软件包以及相关文件
cd ~/colcon_ws/src
ros2 pkg create --build-type ament_python --license Apache-2.0 webots_demo --dependencies rclpy geometry_msgs webots_ros2_driver
cd webots_demo
mkdir launch worlds
touch launch/mbot_launch.py
touch resource/mbot.urdf
touch webots_demo/mbot_driver.py webots_demo/obstacle_avoider.py
(2)在 worlds 目录中添加 my_world.wbt,这个文件是 webots 的建模文件,里面包含虚拟仿真环境和一个差速轮式机器人。本文暂时不深究 webots 建模的细节,读者可以参考 webots tutorials 。
(3)编写 mbot_driver.py:这是差速轮式机器人车轮电机控制程序,内部有注释帮助理解
python">import rclpy
from geometry_msgs.msg import TwistHALF_DISTANCE_BETWEEN_WHEELS = 0.045
WHEEL_RADIUS = 0.025# MbotDriver 是机器人的控制器程序,他创建了一个 ros2 节点 mbot_driver,
# 订阅 cmd_vel 话题,接收 Twist 消息,然后根据 Twist 消息的线速度和角速度控制机器人的左右轮速度,从而实现机器人的运动控制。
class MbotDriver:def init(self, webots_node, properties):# 获取 webots 里的 robot 对象,在本样例就是 my_world.wbt 中的 mbot_carself._robot = webots_node.robot# 获取左右轮的电机对象,并设置电机的目标位置为极大(一直旋转)和速度为 0self._left_motor = self._robot.getDevice('left wheel motor')self._right_motor = self._robot.getDevice('right wheel motor')self._left_motor.setPosition(float('inf'))self._left_motor.setVelocity(0)self._right_motor.setPosition(float('inf'))self._right_motor.setVelocity(0)self._target_twist = Twist()# 创建一个 ros2 节点 mbot_driver,订阅 cmd_vel 话题,用来驱动 mbot_car# 接收到的 Twist 消息存入 self._target_twist 中,等待 step 函数处理rclpy.init(args=None)self._node = rclpy.create_node('mbot_driver')self._node.create_subscription(Twist, 'cmd_vel', self._cmd_vel_callback, 1)def _cmd_vel_callback(self, twist):self._target_twist = twist# step 由 webots_ros2_driver.webots_controller.WebotsController 调用,称之为 simulation step# 这里可以理解为是机器人控制器的主循环函数,周期调用def step(self):# 使用 spin_once 来处理 mbot_driver 的一次事件,这里是一次 cmd_vel 订阅# 如果没有这个函数,_cmd_vel_callback 是不会被执行的# 如果事件没来,会立即返回,不会阻塞,确保实时性rclpy.spin_once(self._node, timeout_sec=0)# 这里讲解了 Twist 理解 和 右手定则:https://blog.csdn.net/cy1641395022/article/details/131236155# 获取机器人的前进速度和旋转速度,根据右手定则:# 如果机器人向左转(顺时针),angular_speed为负;# 如果机器人向右转(逆时针),angular_speed为正;forward_speed = self._target_twist.linear.xangular_speed = self._target_twist.angular.z# 机器人的前进和旋转速度需要转换为左右轮转速,由于机器人是差速驱动,所以需要根据机器人的轮距和轮径来计算左右轮转速# HALF_DISTANCE_BETWEEN_WHEELS 是机器人的轮距的一半,乘以 angular_speed 就是机器人内外轮线速度的补偿值# 得到内外轮线速度后,再除以 WHEEL_RADIUS 就是内外轮的转速(角速度乘以旋转半径为线速度)# 简单的三个场景,可以帮助理解这个公式:# 第一,控制机器人直线前进(forward_speed 为正,angular_speed 为0),左右轮转速必须相同,且转向相同# 第二,控制机器人原地顺时针旋转(forward_speed 为0,angular_speed 为负),左右轮转速必须相同,且转向相反# 第三,控制机器人原地逆时针旋转(forward_speed 为0,angular_speed 为正),左右轮转速必须相同,且转向相反command_motor_left = (forward_speed - angular_speed * HALF_DISTANCE_BETWEEN_WHEELS) / WHEEL_RADIUScommand_motor_right = (forward_speed + angular_speed * HALF_DISTANCE_BETWEEN_WHEELS) / WHEEL_RADIUS# 设置左右轮的目标转速self._left_motor.setVelocity(command_motor_left)self._right_motor.setVelocity(command_motor_right)
(4)编写 mbot.urdf:这是差速轮式机器人的 URDF 描述文件(Unified Robot Description Format,统一的机器人描述文件格式,使用 xml 格式),为机器人添加了左右距离传感器,并指定了车轮电机控制器。
<?xml version="1.0" ?>
<robot name="My robot"><webots><device reference="ds0" type="DistanceSensor"><ros><topicName>/left_sensor</topicName><alwaysOn>true</alwaysOn></ros></device><device reference="ds1" type="DistanceSensor"><ros><topicName>/right_sensor</topicName><alwaysOn>true</alwaysOn></ros></device> <plugin type="webots_demo.mbot_driver.MbotDriver" /></webots>
</robot>
(4)编写 obstacle_avoider.py:这个程序基于左右距离传感器的数据,通过 cmd_vel topic 控制机器人避障。
python">import rclpy
from rclpy.node import Node
from sensor_msgs.msg import Range
from geometry_msgs.msg import TwistMAX_RANGE = 0.15# ObstacleAvoider 是机器人行动的控制程序,主要是避障,防止机器人撞墙
# 他创建了一个 ros2 节点 obstacle_avoider,订阅了两个传感器话题 left_sensor 和 right_sensor,
# 接收 Range 消息,然后根据传感器的距离,通过 cmd_vel 发给 mbot_driver 控制机器人运动
class ObstacleAvoider(Node):def __init__(self):super().__init__('obstacle_avoider')self._publisher = self.create_publisher(Twist, 'cmd_vel', 1)self.create_subscription(Range, 'left_sensor', self._left_sensor_callback, 1)self.create_subscription(Range, 'right_sensor', self._right_sensor_callback, 1)def _left_sensor_callback(self, message):self._left_sensor_value = message.rangedef _right_sensor_callback(self, message):self._right_sensor_value = message.range# 每次收到一个传感器的数据,就计算一次机器人的运动控制command_message = Twist()command_message.linear.x = 0.1# 如果左右传感器的距离有一个小于 0.9 * MAX_RANGE,就让机器人向顺时针向右转,否则默认为0,即直线行驶if self._left_sensor_value < 0.9 * MAX_RANGE or self._right_sensor_value < 0.9 * MAX_RANGE:command_message.angular.z = -2.0self._publisher.publish(command_message)def main(args=None):rclpy.init(args=args)avoider = ObstacleAvoider()rclpy.spin(avoider)avoider.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()
(5)编写 mbot_launch.py :
python">import os
import launch
from launch_ros.actions import Node
from launch import LaunchDescription
from ament_index_python.packages import get_package_share_directory
from webots_ros2_driver.webots_launcher import WebotsLauncher
from webots_ros2_driver.webots_controller import WebotsControllerdef generate_launch_description():package_dir = get_package_share_directory('webots_demo')mbot_description_path = os.path.join(package_dir, 'resource', 'mbot.urdf')# 使用 webots_ros2_driver.webots_launcher.WebotsLauncher 来启动 webots,加载 my_world.wbt# my_world.wbt 内有一个 mbot_car 机器人# 补充:如何制作 my_world.wbt,可以参考:# https://cyberbotics.com/doc/guide/tutorialswebots_world = WebotsLauncher(world=os.path.join(package_dir, 'worlds', 'my_world.wbt'))# 使用 webots_ros2_driver.webots_controller.WebotsController 来启动 mbot_car 机器人的控制器# 参数 robot_description 为 mbot.urdf,里面指定了 webots_demo.mbot_driver.MbotDriver 为机器人的控制器mbot_controller = WebotsController(robot_name='mbot_car',parameters=[{'robot_description': mbot_description_path},], )# 额外启动一个避障控制器,订阅 mbot_car 发来的左右距离传感器数据,通过 cmd_vel,控制 mbot_car 机器人的运动obstacle_avoider = Node(package='webots_demo',executable='obstacle_avoider',)return LaunchDescription([webots_world,mbot_controller,obstacle_avoider,launch.actions.RegisterEventHandler(event_handler=launch.event_handlers.OnProcessExit(target_action=webots_world,on_exit=[launch.actions.EmitEvent(event=launch.events.Shutdown())],))])
(6)修改 setup.py
python">import os
from glob import glob
from setuptools import find_packages, setuppackage_name = 'webots_demo'setup(name=package_name,version='0.0.0',packages=find_packages(exclude=['test']),data_files=[('share/ament_index/resource_index/packages',['resource/' + package_name]),('share/' + package_name, ['package.xml']),(os.path.join('share', package_name, 'launch'), glob(os.path.join('launch', '*_launch.py'))),(os.path.join('share', package_name, 'worlds'), glob(os.path.join('worlds', '*.wbt'))),(os.path.join('share', package_name, 'resource'), glob(os.path.join('resource', '*.urdf')))],install_requires=['setuptools'],zip_safe=True,maintainer='ycao',maintainer_email='1641395022@qq.com',description='TODO: Package description',license='Apache-2.0',tests_require=['pytest'],entry_points={'console_scripts': ['mbot_driver = webots_demo.mbot_driver:main','obstacle_avoider = webots_demo.obstacle_avoider:main'],},
)
(7)编译并运行
cd ~/colcon_ws/src
colcon build --packages-select webots_demo
source install/local_setup.bash
ros2 launch webots_demo mbot_launch.py
3 总结
本文主要通过一个差速轮式机器人仿真样例,为大家引入 webots ,但没有深入探究 webots 的建模细节。尽快如此,读者可以在本文的基础上,利用文中提到的资料,对 webots 进行深入的学习和研究。
本文的代码托管在本人的 github 上:webots_demo