上百种【基于YOLOv8/v10/v11的目标检测系统】目录(python+pyside6界面+系统源码+可训练的数据集+也完成的训练模型)-CSDN博客
............................................................................................
摘要:
本文提出了一种基于YOLOv11算法的大规模场景目标检测系统,利用SODA10M数据集,该数据集包含一千万张图片,涵盖多种场景和类别。本文利用9000张图片(8000张训练集,1000张验证集)进行初步模型训练,最终开发出一个高效的大规模场景目标检测模型。为了方便用户操作和实时检测,本系统还开发了基于Python和PySide6的图形用户界面(GUI),实现了大规模场景的目标检测功能。此外,为保障系统安全,系统还配备了用户登录界面,需通过账户和密码方可访问。完整的数据集、检测系统源代码以及已训练好的模型可通过文末链接获取。
1.主要功能:
(1)用户注册、登录与密码修改功能,确保系统的安全性。
(2)支持自定义系统标题、简介及封面,提升用户体验。
(3)检测界面具备最小化、最大化以及退出系统功能。
(4)支持对单张图片、图片文件夹、视频或摄像头进行目标检测。
(5)具备检测暂停、结果保存和检测结束功能,提升灵活性。
(6)可自由切换检测模型,满足不同场景需求。
(7)允许用户调整检测的置信度和IoU阈值。
(8)支持单类目标或特定目标的检测,适应性强。
(9)实时展示检测目标的详细信息及检测用时。
(10)自动记录所有检测目标的坐标信息,方便后续分析。
目标检测系统更多的功能介绍以及详细的操作教程请参考链接:目标检测系统操作说明【用户使用指南】(python+pyside6界面+系统源码+可训练的数据集+也完成的训练模型)-CSDN博客
2.意义:
目标检测是计算机视觉领域的重要组成部分,为智能交通和自动驾驶提供了核心技术支持。车辆和行人的实时检测对于实现安全的自动驾驶至关重要。因此,开发高效的目标检测算法是保障交通安全和顺畅的重要基础。
3.数据集介绍:
本系统所使用的数据集包括训练集(8000张)、验证集(1000张)和测试集(1000张)。数据标签采用YOLO模型常用的TXT格式,方便直接应用于YOLOv11模型的训练。数据集涵盖 6 种类别:Pedestrian: 行人, Cyclist: 骑行者, Car: 汽车, Truck: 卡车, Tram: 电车, Tricycle: 三轮车
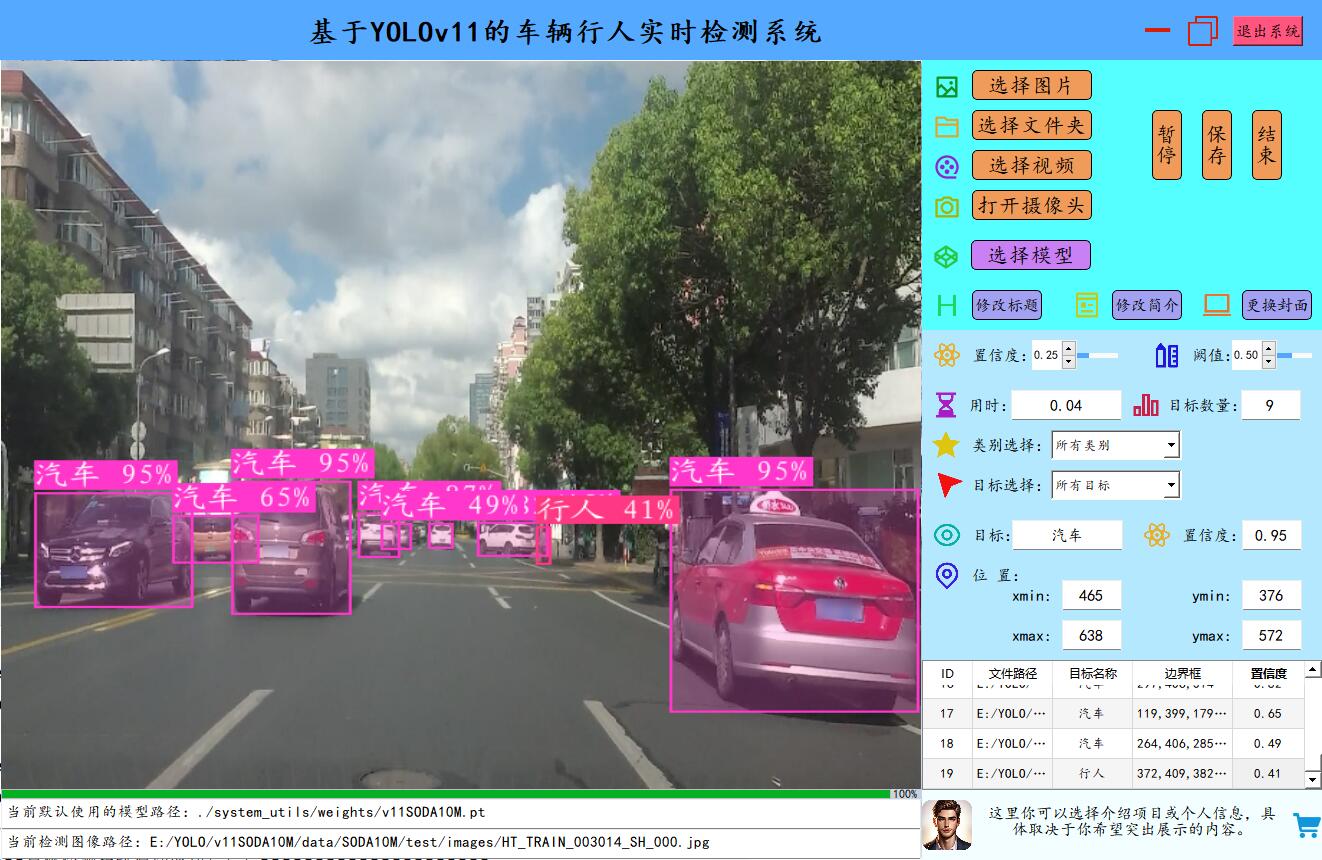
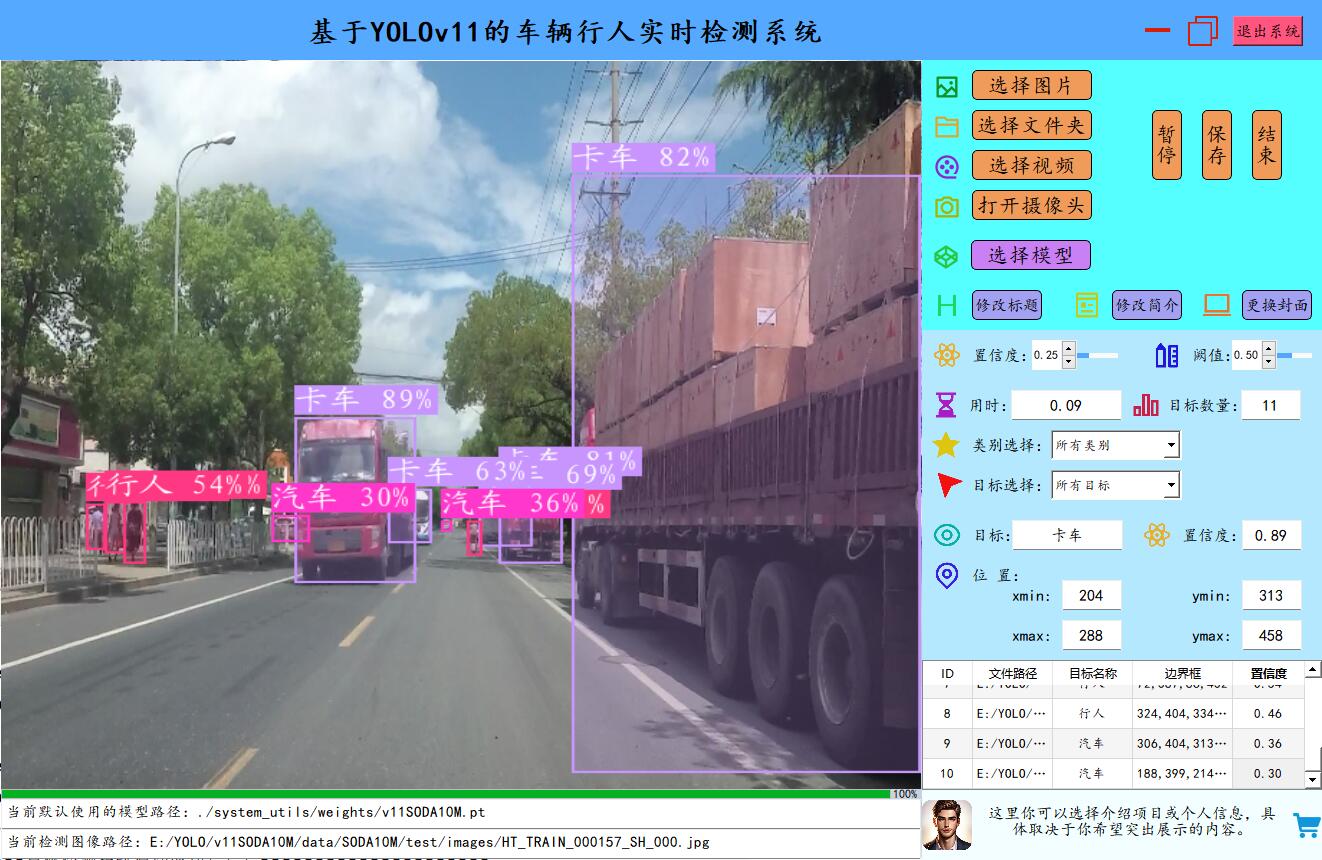
4.检测效果展示:
部分检测结果如下所示,展示了系统在不同场景下的检测表现。

5.YOLOv11模型概述:
YOLOv11是YOLO系列模型中最新的版本,其主要特点如下:
增强的特征提取:YOLO11 采用了改进的主干和颈部架构,显著增强了特征提取能力。这一创新设计使得模型在复杂场景下的对象检测精度更高,能够更有效地处理多样化的检测任务。此外,增强的特征提取能力帮助 YOLO11 在各种视觉挑战中表现得更加可靠,确保了在高难度任务中也能取得理想的效果。
针对效率和速度进行了优化:在效率和速度方面,YOLO11 进行了优化,采用了更完善的架构设计和优化的训练流程。这使得模型在处理速度上有了显著提升,同时在准确性和性能之间保持了最佳的平衡。通过这样的设计,YOLO11 能够实现快速的实时推理,满足实时应用的需求,如监控和自动驾驶等。
使用更少的参数实现更高的准确性:YOLO11 在参数使用上也进行了改进。得益于模型设计的进步,YOLO11m 在 COCO 数据集上达到了更高的平均精度(mAP),而其使用的参数比 YOLOv8m 少了 22%。这一特性使得 YOLO11 在保证检测准确性的同时,大幅提高了计算效率,更加适合资源有限的设备使用。
跨环境的适应性:YOLO11 的跨环境适应性使其可以无缝部署在多种平台,包括边缘设备、云平台和支持 NVIDIA GPU 的系统。这种灵活性确保了用户能够在不同的环境中高效运行 YOLO11,满足广泛的应用需求。
支持的任务范围广泛:YOLO11 支持多种计算机视觉任务,包括对象检测、实例分割、图像分类、姿势估计以及定向对象检测(OBB)。其多功能的设计使得 YOLO11 能够应对各种计算机视觉挑战,为不同行业的应用提供强有力的支持。
6.模型的训练结果:
模型是已经训练好了的。训练结果保存在"runs\detect\train"目录下的。其中"runs\detect\train\best.pt"是训练过程中获得的最佳模型。
如果你需要重新训练模型,请参考链接:目标检测系统中需要【重新训练模型】说明
7.系统界面展示:
用户界面:
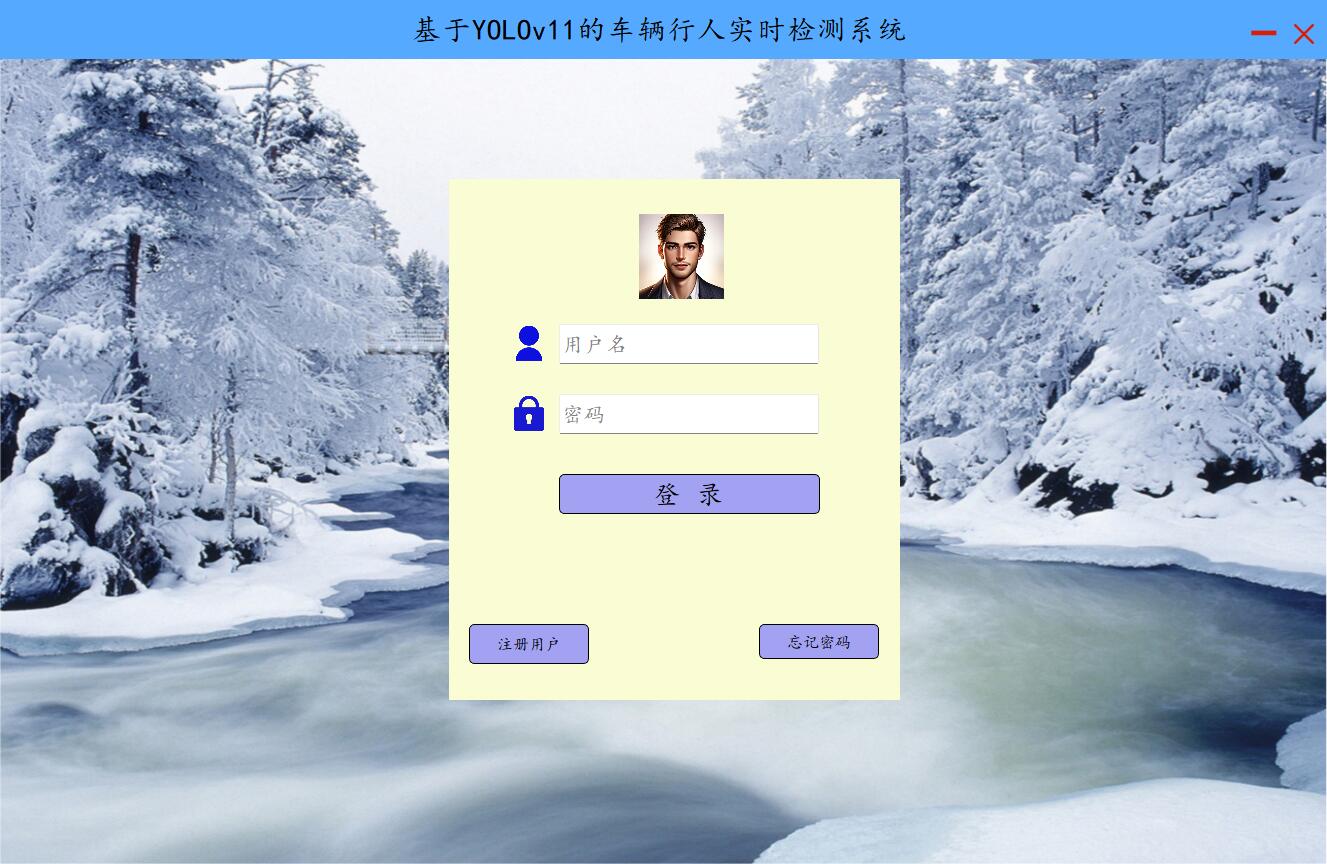
初始化界面:

检测界面:
完整的项目文件代码获取链接:https://mbd.pub/o/bread/mbd-Zp2UmZdv