首页
编程日记
开发工具
嵌入式
服务器
运维
LR导出预设
news
/
2024/11/29 7:52:22
/
设置两个选择原片和1000像素的类别
http://www.ppmy.cn/news/726155.html
相关文章
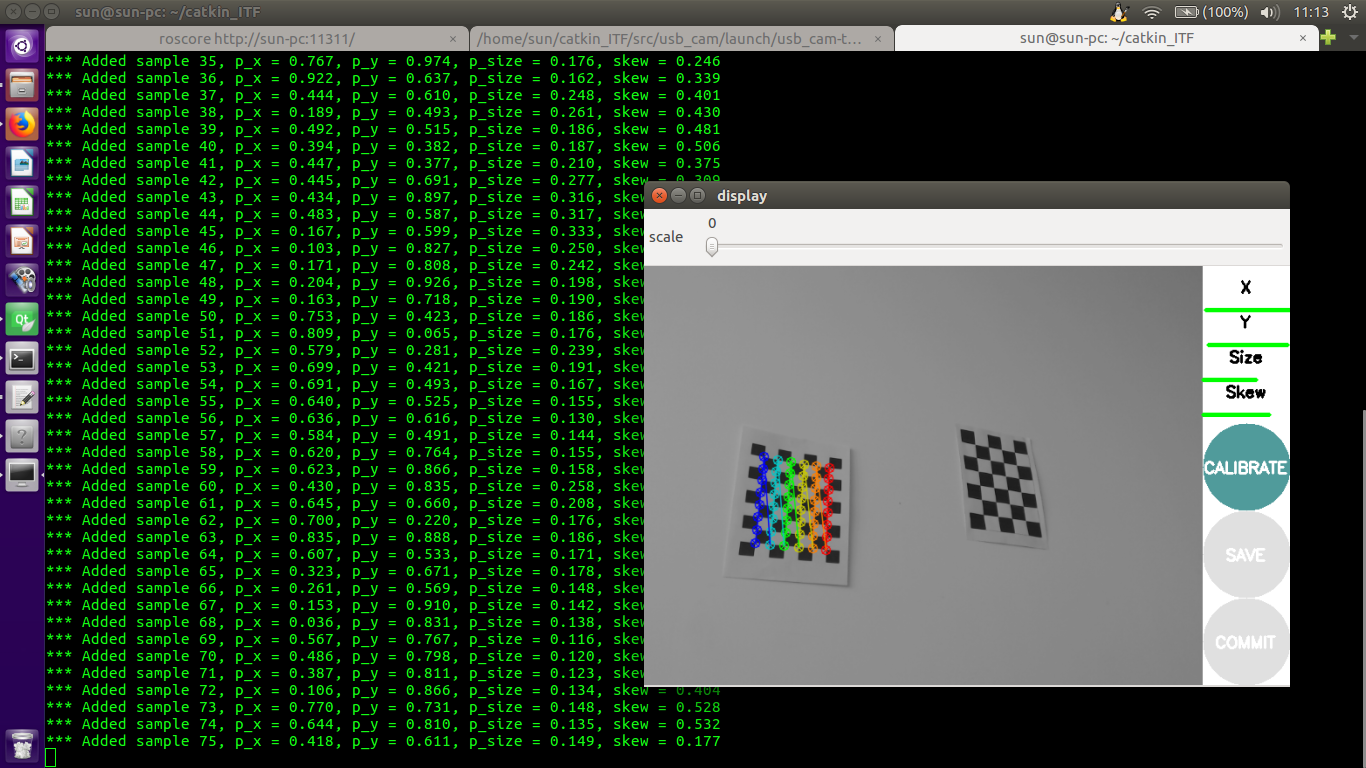
ROS单目相机标定
camera_calibration/Tutorials/MonocularCalibration - ROS Wiki 说明:本文介绍使用camera_calibration的cameracalibrator.py节点在 ROS 上使用原始图像校准单目相机。 1. 在开始之前 确保您具备以下条件: 具有已知尺寸的棋盘。本文使用 16.2 毫米正…
阅读更多...
ROS单目相机标定 ------ 亲测
link 主要参考1 主要参考2 主要参考3 camera_calibration/Tutorials/MonocularCalibration - ROS Wiki 说明:本教程介绍使用camera_calibration的cameracalibrator.py节点在 ROS 上使用原始图像校准单目相机。 1. 在开始之前 确…
阅读更多...
【LCC系列】不用标定目标,实现高分辨率激光雷达和相机的像素级自标定(2020)
文章目录 1 动机2 方法2.1 边缘约束2.2 边缘提取2.3 边缘匹配2.4 外参标定2.4.1 测量噪声2.4.2 外参优化2.4.3 估计的不确定性2.4.4 边缘分布的影响 3 实验 本文介绍一个 高分辨率激光雷达(Livox)和相机的外参标定方法(targetless方法),该方…
阅读更多...
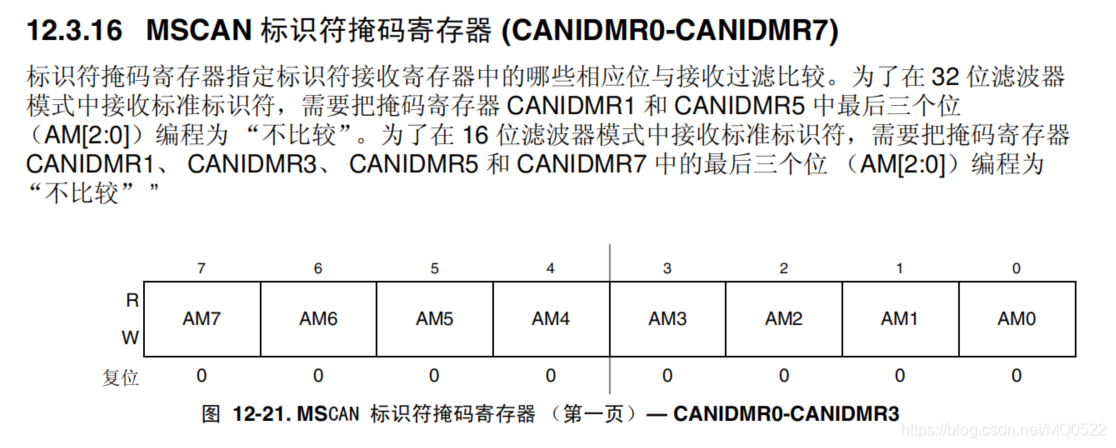
飞思卡尔MC9S12X:CAN初始化配置
飞思卡尔MC9S12X:CAN初始化配置 飞思卡尔MC9S12X:CAN发送配置 飞思卡尔MC9S12X:CAN接收配置 飞思卡尔MC9S12X:CAN驱动函数在主函数中的应用 一、MSCAN初始化流程 查询是否进入初始化状态,如不是,进入初始化…
阅读更多...
ROS下单目相机标定过程
下面简单记录一下我利用ros标定相机参数的过程,Ubuntu 16.04 ,摄像头用的罗技C920 ROSwiki有相机矫正的官方文档,有单目的也有立体相机的教程,建议直接看原文,原汁原味:链接 1、相机标定第一步࿰…
阅读更多...
470款日系文艺LR预设电影质感Lightroom预设PR/PS/AE/FCPX/LUT预设
下载:470款日系文艺LR预设电影质感Lightroom预设PR/PS/AE/FCPX/LUT预设
阅读更多...
相机参数标定(camera calibration)及标定结果如何使用
重要更新:本文的第二次更新已发布。为了不破坏现有内容的结构,故重新开始新的一篇文章。同时本文的一些内容也会涵盖进去。 欢迎关注。 《第二更,相机参数标定基础:从小孔成像开始到单双目标定》 关于实践部分,可参…
阅读更多...
realsense系列相机ros内外参标定2022.11.20
这里写目录标题 环境 环境 ros kinetic ubuntu 16.04 相机 realsense D455i 想着realsense是否和kinect一样进行内参标定,输出yaml文件,但是搜了一堆内容,并没有什么完整或是可靠的说法。 https://github.com/IntelRealSense/realsense-ros/…
阅读更多...
最新文章
(0基础保姆教程)-JavaEE开课啦!--11课程(初识Spring MVC + Vue2.0 + Mybatis)-实验9
【机器学习】—逻辑回归
C语言——海龟作图(对之前所有内容复习)
uniapp介入极光推送教程 超级详细
【Linux系列】Chrony时间同步服务器搭建完整指南
No.2 杀戮尖塔Godot复刻2卡牌拖动和状态机1|CardUI|BattleUI