首页
编程日记
开发工具
嵌入式
服务器
运维
470款日系文艺LR预设电影质感Lightroom预设PR/PS/AE/FCPX/LUT预设
news
/
2024/11/29 9:43:37
/
下载:470款日系文艺LR预设电影质感Lightroom预设PR/PS/AE/FCPX/LUT预设
http://www.ppmy.cn/news/726149.html
相关文章
相机参数标定(camera calibration)及标定结果如何使用
重要更新:本文的第二次更新已发布。为了不破坏现有内容的结构,故重新开始新的一篇文章。同时本文的一些内容也会涵盖进去。 欢迎关注。 《第二更,相机参数标定基础:从小孔成像开始到单双目标定》 关于实践部分,可参…
阅读更多...
realsense系列相机ros内外参标定2022.11.20
这里写目录标题 环境 环境 ros kinetic ubuntu 16.04 相机 realsense D455i 想着realsense是否和kinect一样进行内参标定,输出yaml文件,但是搜了一堆内容,并没有什么完整或是可靠的说法。 https://github.com/IntelRealSense/realsense-ros/…
阅读更多...
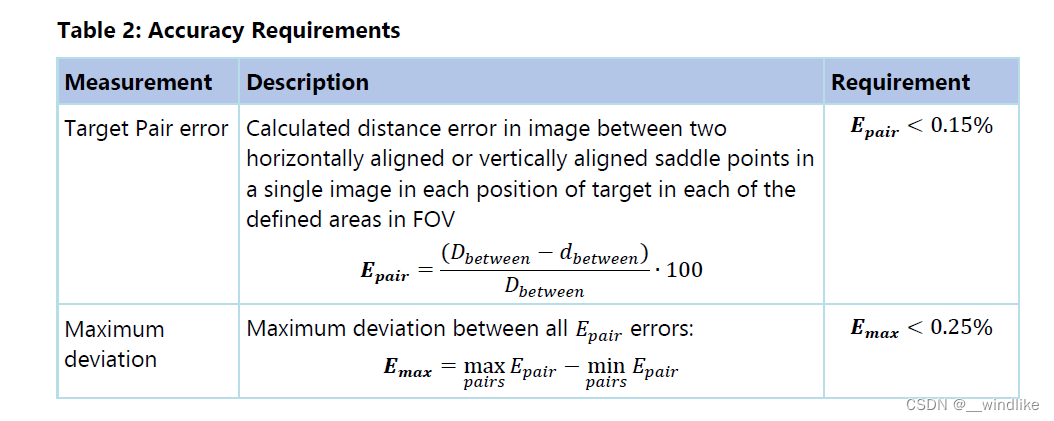
六、相机标定效果评价
1. 重投影误差 检测到的二维图像的角点和真实世界三维点的投影点之间的距离。使用标定得到的相机的内外参和畸变参数将三维世界的点投影得到像素像素坐标系中的二维角点,然后和算法检测到的二维图像的角点计算均方误差(RMS), 一般平均重投影…
阅读更多...
相机与IMU联合标定
相机与IMU联合标定 1 imu_utils 标定IMU的内参1.1 安装环境1.2 录制IMU数据集 2 kalibr 标定工具2.1 安装2.2 校准相机的内外参2.3 校准相机与IMU外参 总结参考资料 1、 imu_utils标定IMU的内参,可以校准IMU的噪声密度和随机游走噪声 2、kalibr包标定相机的内外参数…
阅读更多...
温暖人像LR预设(含lr预设导入教程)
这是一套专业的温暖人像LR预设,专为艺术肖像编辑器而设计。此套温暖人像LR预设包含ACR预设,PS动作以及多种不同效果类型的Lightroom预设,经过精心校准以保留自然肤色的美丽温暖色彩来增强它们,让您可以轻松调整您喜欢的色彩&#…
阅读更多...
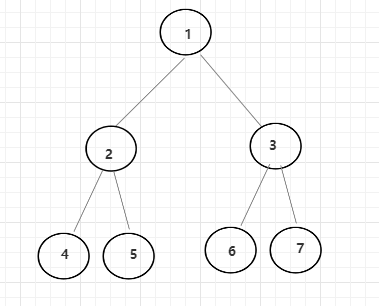
二叉树 — 给定二叉树中某个节点,返回该节点的后继节点
后继节点定义: 二叉树以中序的方式进行遍历打印,节点X的下一个节点,就是X的后继节点。 假设二叉树如下图所示:则中序遍历的后打印出来的就是 4 -> 2 -> 5 -> 1 -> 6 -> 3 -> 7。如果X 3,则X的后继节…
阅读更多...
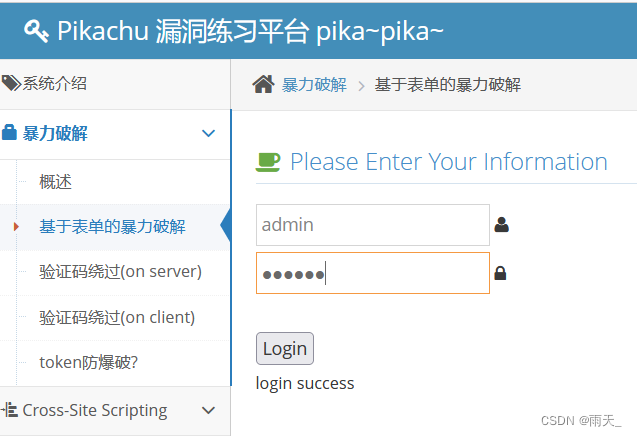
安全 --- http报文包详解及burp简单使用
HTTP HTTP(超文本传输协议)是今天所有web应用程序使用的通信协议。最初HTTP只是一个为了获取基本文本的静态资源而开发的简单协议,后来对其进行扩展和利用,使其发展为能够支持如今常见的复杂分布式应用程序。 (1&…
阅读更多...
镁客网每周硬科技领域投融资汇总(1.27-1.31),英特尔拟大手笔收购以色列芯片制造商...
1月份,国内航空航天已知融资事件达到了3起。 本周硬科技领域投融资事件一共29起,人工智能领域发生12起融资事件,占比42%;生物医药领域发生9起融资事件,占比32%;区块链领域发生3起融资事件,分别…
阅读更多...
最新文章
数据库(MySQL黑马)
霍夫变换:原理剖析与 OpenCV 应用实例
11.25c++继承、多态
QT6学习第四天 感受QT的文件编译
在 Ubuntu 上部署 MediaWiki 开源维基平台
【vue-router】vue-router如何实现动态路由