一、芯片介绍
BH1750FVI是一款数字型光强度传感器集成芯片。BH1750的内部由光敏二极管、运算放大器、ADC采集、晶振等组成。
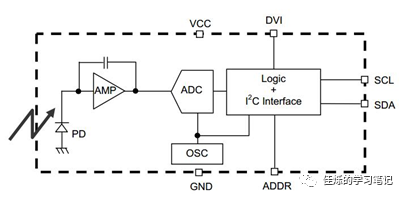
结构图
PD二极管通过光生伏特效应将输入光信号转换成电信号,经运算放大电路放大后,由ADC采集电压,然后通过逻辑电路转换成16位二进制数存储在内部的寄存器中(注:进入光窗的光越强,光电流越大,电压就越大,所以通过电压的大小就可以判断光照大小,但是要注意的是电压和光强虽然是一一对应的,但不是成正比的,所以这个芯片内部是做了线性处理的,这也是为什么不直接用光敏二极管而用集成IC的原因)。BH1750引出了时钟线和数据线,单片机通过I2C协议可以与BH1750模块通讯,可以选择BH1750的工作方式,也可以将BH1750寄存器的光照度数据提取出来。也就是说我们只需要配置一个iIC协议就可以直接读出光照强度了。

传感器实物
二、传感器特点:
-
支持I2CBUS接口
-
接近视觉灵敏度的光谱灵敏度特性
-
输出对应亮度的数字值
-
对应广泛的输入光范围。
(相当于1-65535lx)
-
通过降低功率功能,实现低电流化。
-
通过50Hz/60Hz除光噪音功能实现稳定的测定。
-
支持1.8v逻辑输入接口。
-
无需其他外部件。
-
光源依赖性弱。
-
有两种可选的I2Cslave地址。
-
可调的测量结果影响较大的因素为光入口大小。
-
使用这种功能计算1.1lx到100000lx马克斯/分钟的范围。
-
最小误差变动在±20%。
-
受红外线影响很小。
三、配置传感器
准确的来说是配置IIC协议。先说一下大概过程
-
发送上电命令
-
发送测量命令
-
等待测量结果
-
读出测量结果
-
计算结果
接下来我们详细的说一下每一步是咋进行的。首先我们需要先了解一下芯片的指令集。我们常用的指令就通电和连续H分频率模式这两个指令而已。
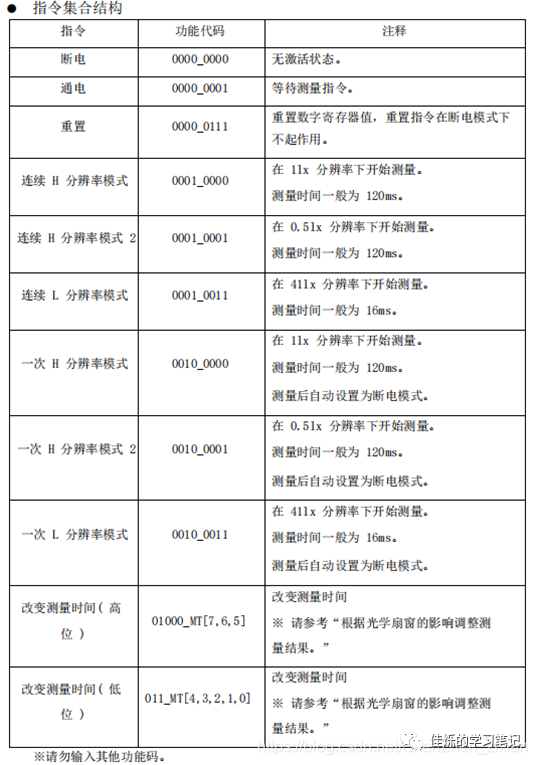
发送上电命令
通过指令集可以知道只是发送了0x01指令即可改为了上电状态。
发送测量命令
通常都是使用的连续H分频率模式,注意这里H/L代表着ADDR口接的电平,选择连续H分频率模式就需要接低电平如图。选择好合适的模式通过指令集就可以配置好工作方式了。
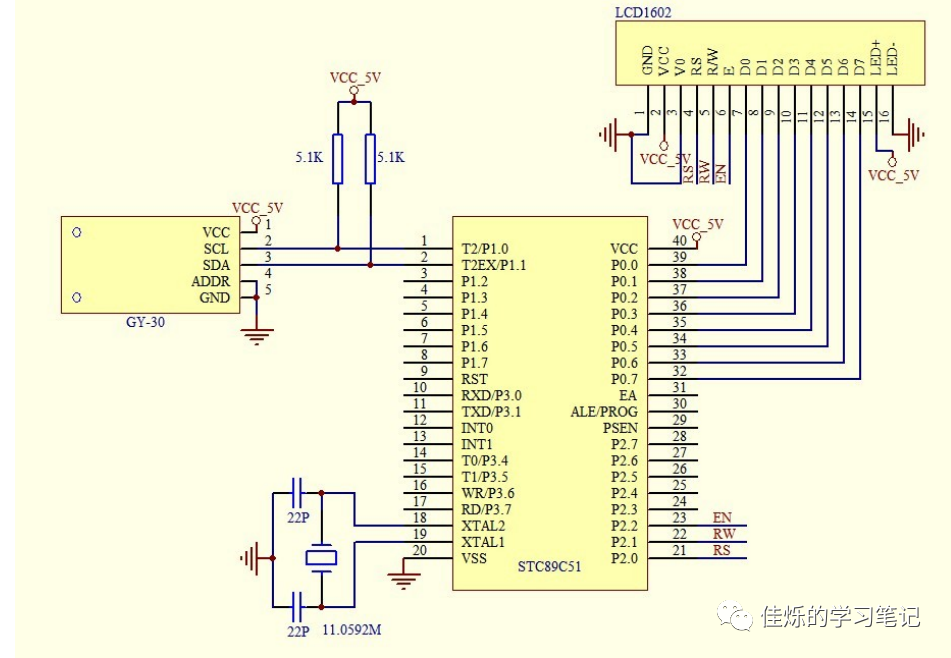
原理图
等待测量结束
就是延时等待数据测量完,不同模式下需要的时间不同,可看指令集图片确定,建议延时稍微比标准值大些。基本使用的180ms就好。
计算结果
测出的数据为2个字节,所以需要先合成一个数,在乘以分辨率在除以1.2就能得到测量的光照值。
光照强度 =(寄存器值[15:0] * 分辨率) / 1.2 (单位:勒克斯lx)
//***************************************
// BH1750FVI IIC测试程序
// 使用单片机STC89C51
// 晶振:11.0592M
// 显示:LCD1602
// 编译环境 Keil uVision2
// 参考宏晶网站24c04通信程序
//****************************************
#include <REG51.H>
#include <math.h> //Keil library
#include <stdio.h> //Keil library
#include <INTRINS.H>
#define uchar unsigned char
#define uint unsigned int
#define DataPort P0 //LCD1602数据端口
sbit SCL=P1^0; //IIC时钟引脚定义
sbit SDA=P1^1; //IIC数据引脚定义
sbit LCM_RS=P2^0; //LCD1602命令端口
sbit LCM_RW=P2^1; //LCD1602命令端口
sbit LCM_EN=P2^2; //LCD1602命令端口 #define SlaveAddress 0x46 //定义器件在IIC总线中的从地址,根据ALT ADDRESS地址引脚不同修改//ALT ADDRESS引脚接地时地址为0x46,接电源时地址为0xB8
typedef unsigned char BYTE;
typedef unsigned short WORD;BYTE BUF[8]; //接收数据缓存区
uchar ge,shi,bai,qian,wan; //显示变量
int dis_data; //变量void delay_nms(unsigned int k);
void InitLcd();
void Init_BH1750(void);void WriteDataLCM(uchar dataW);
void WriteCommandLCM(uchar CMD,uchar Attribc);
void DisplayOneChar(uchar X,uchar Y,uchar DData);
void conversion(uint temp_data);void Single_Write_BH1750(uchar REG_Address); //单个写入数据
uchar Single_Read_BH1750(uchar REG_Address); //单个读取内部寄存器数据
void Multiple_Read_BH1750(); //连续的读取内部寄存器数据
//------------------------------------
void Delay5us();
void Delay5ms();
void BH1750_Start(); //起始信号
void BH1750_Stop(); //停止信号
void BH1750_SendACK(bit ack); //应答ACK
bit BH1750_RecvACK(); //读ack
void BH1750_SendByte(BYTE dat); //IIC单个字节写
BYTE BH1750_RecvByte(); //IIC单个字节读//-----------------------------------//*********************************************************
void conversion(uint temp_data) // 数据转换出 个,十,百,千,万
{ wan=temp_data/10000+0x30 ;temp_data=temp_data%10000; //取余运算qian=temp_data/1000+0x30 ;temp_data=temp_data%1000; //取余运算bai=temp_data/100+0x30 ;temp_data=temp_data%100; //取余运算shi=temp_data/10+0x30 ;temp_data=temp_data%10; //取余运算ge=temp_data+0x30;
}//毫秒延时**************************
void delay_nms(unsigned int k)
{
unsigned int i,j;
for(i=0;i<k;i++)
{
for(j=0;j<121;j++)
{;}}
}/*******************************/
void WaitForEnable(void)
{
DataPort=0xff;
LCM_RS=0;LCM_RW=1;_nop_();
LCM_EN=1;_nop_();_nop_();
while(DataPort&0x80);
LCM_EN=0;
}
/*******************************/
void WriteCommandLCM(uchar CMD,uchar Attribc)
{
if(Attribc)WaitForEnable();
LCM_RS=0;LCM_RW=0;_nop_();
DataPort=CMD;_nop_();
LCM_EN=1;_nop_();_nop_();LCM_EN=0;
}
/*******************************/
void WriteDataLCM(uchar dataW)
{
WaitForEnable();
LCM_RS=1;LCM_RW=0;_nop_();
DataPort=dataW;_nop_();
LCM_EN=1;_nop_();_nop_();LCM_EN=0;
}
/***********************************/
void InitLcd()
{
WriteCommandLCM(0x38,1);
WriteCommandLCM(0x08,1);
WriteCommandLCM(0x01,1);
WriteCommandLCM(0x06,1);
WriteCommandLCM(0x0c,1);
}
/***********************************/
void DisplayOneChar(uchar X,uchar Y,uchar DData)
{
Y&=1;
X&=15;
if(Y)X|=0x40;
X|=0x80;
WriteCommandLCM(X,0);
WriteDataLCM(DData);
} /**************************************
延时5微秒(STC90C52RC@12M)
不同的工作环境,需要调整此函数,注意时钟过快时需要修改
当改用1T的MCU时,请调整此延时函数
**************************************/
void Delay5us()
{_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();
}/**************************************
延时5毫秒(STC90C52RC@12M)
不同的工作环境,需要调整此函数
当改用1T的MCU时,请调整此延时函数
**************************************/
void Delay5ms()
{WORD n = 560;while (n--);
}/**************************************
起始信号
**************************************/
void BH1750_Start()
{SDA = 1; //拉高数据线SCL = 1; //拉高时钟线Delay5us(); //延时SDA = 0; //产生下降沿Delay5us(); //延时SCL = 0; //拉低时钟线
}/**************************************
停止信号
**************************************/
void BH1750_Stop()
{SDA = 0; //拉低数据线SCL = 1; //拉高时钟线Delay5us(); //延时SDA = 1; //产生上升沿Delay5us(); //延时
}/**************************************
发送应答信号
入口参数:ack (0:ACK 1:NAK)
**************************************/
void BH1750_SendACK(bit ack)
{SDA = ack; //写应答信号SCL = 1; //拉高时钟线Delay5us(); //延时SCL = 0; //拉低时钟线Delay5us(); //延时
}/**************************************
接收应答信号
**************************************/
bit BH1750_RecvACK()
{SCL = 1; //拉高时钟线Delay5us(); //延时CY = SDA; //读应答信号SCL = 0; //拉低时钟线Delay5us(); //延时return CY;
}/**************************************
向IIC总线发送一个字节数据
**************************************/
void BH1750_SendByte(BYTE dat)
{BYTE i;for (i=0; i<8; i++) //8位计数器{dat <<= 1; //移出数据的最高位SDA = CY; //送数据口SCL = 1; //拉高时钟线Delay5us(); //延时SCL = 0; //拉低时钟线Delay5us(); //延时}BH1750_RecvACK();
}/**************************************
从IIC总线接收一个字节数据
**************************************/
BYTE BH1750_RecvByte()
{BYTE i;BYTE dat = 0;SDA = 1; //使能内部上拉,准备读取数据,for (i=0; i<8; i++) //8位计数器{dat <<= 1;SCL = 1; //拉高时钟线Delay5us(); //延时dat |= SDA; //读数据 SCL = 0; //拉低时钟线Delay5us(); //延时}return dat;
}//*********************************void Single_Write_BH1750(uchar REG_Address)
{BH1750_Start(); //起始信号BH1750_SendByte(SlaveAddress); //发送设备地址+写信号BH1750_SendByte(REG_Address); //内部寄存器地址,// BH1750_SendByte(REG_data); //内部寄存器数据,BH1750_Stop(); //发送停止信号
}//********单字节读取*****************************************
/*
uchar Single_Read_BH1750(uchar REG_Address)
{ uchar REG_data;BH1750_Start(); //起始信号BH1750_SendByte(SlaveAddress); //发送设备地址+写信号BH1750_SendByte(REG_Address); //发送存储单元地址,从0开始 BH1750_Start(); //起始信号BH1750_SendByte(SlaveAddress+1); //发送设备地址+读信号REG_data=BH1750_RecvByte(); //读出寄存器数据BH1750_SendACK(1); BH1750_Stop(); //停止信号return REG_data;
}
*/
//*********************************************************
//
//连续读出BH1750内部数据
//
//*********************************************************
void Multiple_read_BH1750(void)
{ uchar i; BH1750_Start(); //起始信号BH1750_SendByte(SlaveAddress+1); //发送设备地址+读信号for (i=0; i<3; i++) //连续读取2个地址数据,存储中BUF{BUF[i] = BH1750_RecvByte(); //BUF[0]存储0x32地址中的数据if (i == 3){BH1750_SendACK(1); //最后一个数据需要回NOACK}else{ BH1750_SendACK(0); //回应ACK}}BH1750_Stop(); //停止信号Delay5ms();
}//初始化BH1750,根据需要请参考pdf进行修改****
void Init_BH1750()
{Single_Write_BH1750(0x01); }
//*********************************************************
//主程序********
//*********************************************************
void main()
{ float temp;delay_nms(100); //延时100ms InitLcd(); //初始化LCDInit_BH1750(); //初始化BH1750while(1) //循环{ Single_Write_BH1750(0x01); // power onSingle_Write_BH1750(0x10); // H- resolution modedelay_nms(180); //延时180msMultiple_Read_BH1750(); //连续读出数据,存储在BUF中dis_data=BUF[0];dis_data=(dis_data<<8)+BUF[1];//合成数据,即光照数据temp=(float)dis_data/1.2;conversion(temp); //计算数据和显示DisplayOneChar(0,0,'L'); DisplayOneChar(1,0,'i'); DisplayOneChar(2,0,'g'); DisplayOneChar(3,0,'h'); DisplayOneChar(4,0,'t'); DisplayOneChar(5,0,':'); DisplayOneChar(7,0,wan); //显示数据DisplayOneChar(8,0,qian); DisplayOneChar(9,0,bai); DisplayOneChar(10,0,shi); DisplayOneChar(11,0,ge); DisplayOneChar(13,0,'l'); 显示数单位DisplayOneChar(14,0,'x'); }
}