传感模块:MATEKSYS Optical Flow & LIDAR 3901-L0X
- 1. 模块介绍
- 2. 规格参数
- 3. 使用方法
- Step1: 接线方式
- Step2: 安装方式
- Step3: 使用范围
- 4. 存在问题(思考)
- 4.1 MATEK 3901-L0X 输出协议格式?
- 4.1.1 支持光流计协议(CXOF)
- 4.1.2 支持光流计+激光测距协议(UPFLOW)
- 4.2 iNav & ArduPilot使用该模块存在什么问题?
- 4.3 如何合理的匹配飞控固件?
- 4.4 关于“Sonar connection (Trig & Echo) has not been implemented”的问题?
- 5. iNV - MSP Sensor Protocol (突破)
- 6. MATEK 3901-L0X定位效果
- 7. 测试效果
- 8. 参考资料
这里主要针对模块使用过程中遇到的问题做一些整理和总结。
1. 模块介绍
详见: MATEKSYS Optical Flow & LIDAR 3901-L0X
Beginners Guide To Optical Flow Sensor with LIDAR on Drone MATEKSYS 3901-L0X Opt
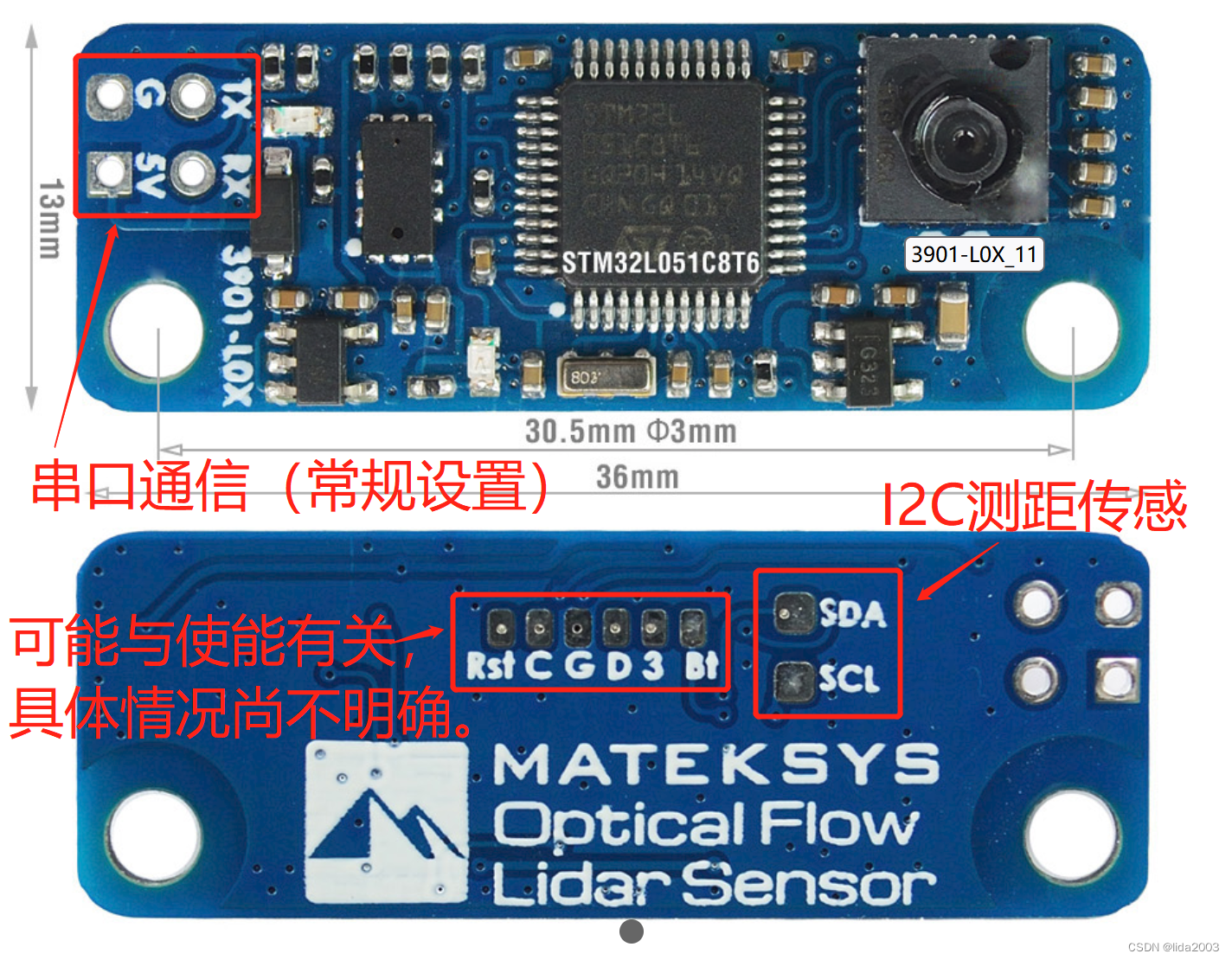
其主要硬件构成:
- PMW3901 Optical Flow Sensor --> SPI
- VL53L0X Lidar Sensor --> I2C
- STM32L051/STM32F051 --> TTL(UART)
2. 规格参数
PMW3901
Field of view: 42 degree
Working range: > 80 mm
Minimum Illumination: >60Lux
VL53L0X
Field of view: 27 degree
Working range: 20 mm ~ 2000 mm
模块参数
Input voltage: 4.5~5.5V
Power Consumption: 40mA
Size: 3612mm (F051 version) 2g
Size: 3613mm (L051 version) 2g
3. 使用方法
根据官网描述和规格分析,我们大致可以知道该模块的使用步骤如下:
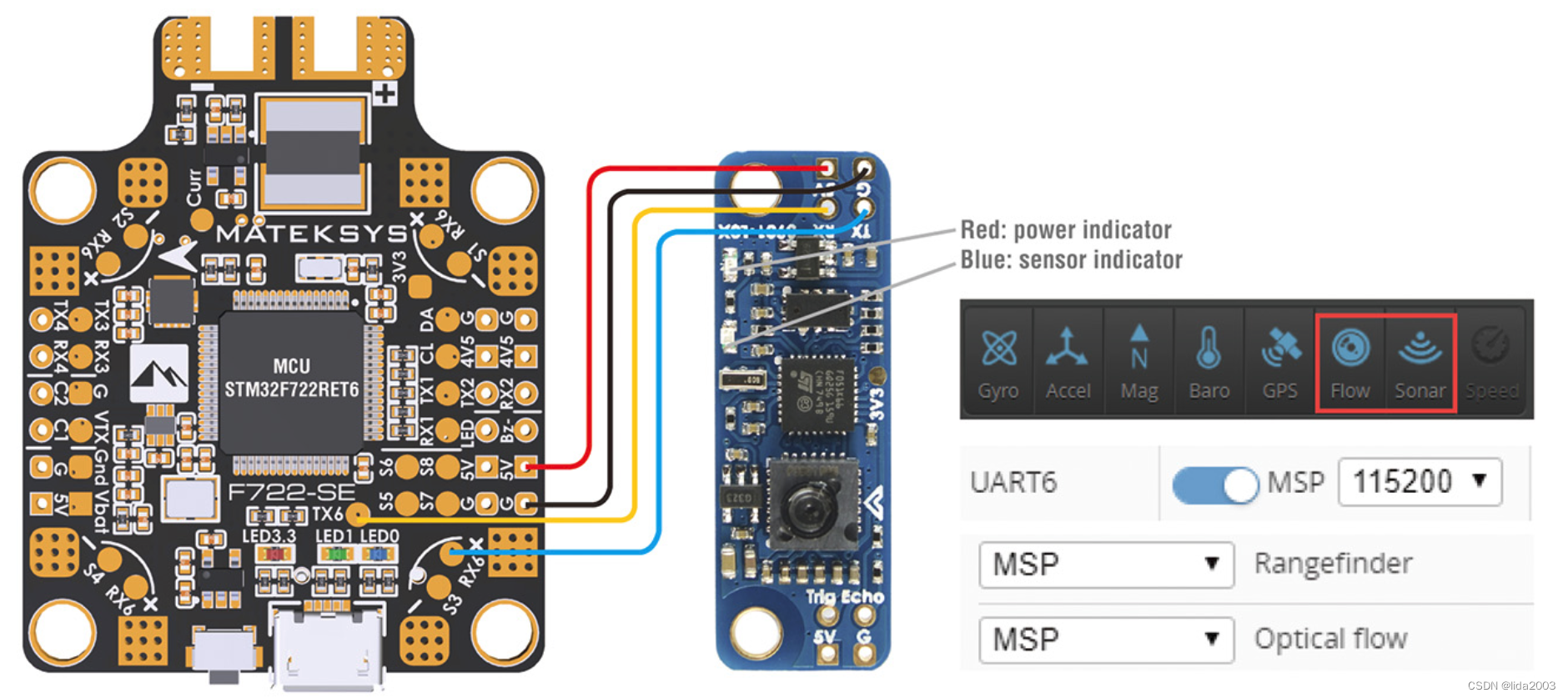
Step1: 接线方式
传感模块:Tx/Rx/GND/VCC与飞控对应引脚相接
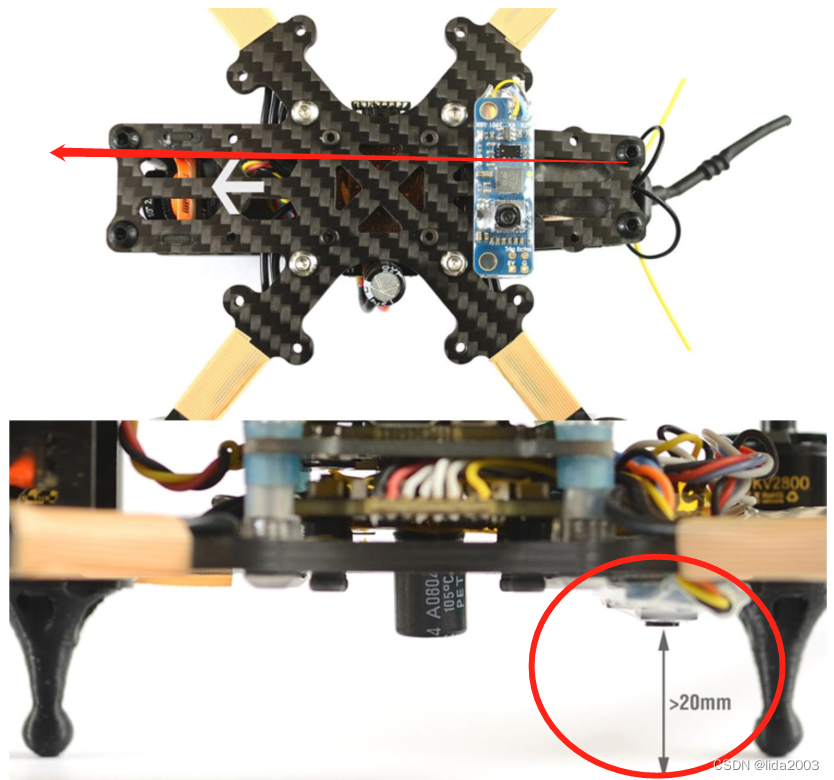
Step2: 安装方式
- 光流计安装方向与机头保持一直,且安装在航模底部。
- 激光测距距离地面高度保持20mm以上。
Step3: 使用范围
鉴于以下细节规格:
光流计 > 80 mm
激光测距 20 mm ~ 2000 mm
气压计 10cm以内存在气垫效应
整体上要做到定点定高的悬停功能存在以下局限:
- 激光测距使能:20mm ~ 80mm ==》VL53L0X定高稳定,定位漂移
- 激光测距使能:80mm ~ 2000mm ==》VL53L0X定高稳定,定位稳定
- 激光测距使能:> 2000mm ==》Baro定高,定位稳定
- 激光测距【不】使能:< 80mm ==》Baro定高,定位漂移
- 激光测距【不】使能:> 80mm ==》Baro定高,定位稳定
4. 存在问题(思考)
基于使用,以及传感应用逻辑,有以下问题:
4.1 MATEK 3901-L0X 输出协议格式?
4.1.1 支持光流计协议(CXOF)
+---------------------------+| header (0xFE) |+---------------------------+|number of data bytes (0x04)|+---------------------------+| x-motion high byte |+---------------------------+| x-motion low byte |+---------------------------+| y-motion high byte |+---------------------------+| y-motion low byte |+---------------------------+| checksum |+---------------------------+| surface quality |+---------------------------+| footer (0xAA) |+---------------------------+
4.1.2 支持光流计+激光测距协议(UPFLOW)
+------------------------------+| up header 1 (0xFE) |+------------------------------+| up header 2 (0x0A) |+------------------------------+| flow_x_integral low byte |+------------------------------+| flow_x_integral high byte |+------------------------------+| flow_y_integral low byte |+------------------------------+| flow_y_integral high byte |+------------------------------+|integration_timespan low byte |+------------------------------+|integration_timespan high byte|+------------------------------+| distance_z low byte |+------------------------------+| distance_z high byte |+------------------------------+| optical flow valid |+------------------------------+| distance credibility |+------------------------------+| XOR |+------------------------------+| footer (0x55) |+------------------------------+
4.2 iNav & ArduPilot使用该模块存在什么问题?
目前从协议格式及代码角度,CXOF & UPFLOW协议不兼容。
从兼容性角度看:
Ardupilot代码中,直接支持CXOF & CXOF协议。
iNav代码中,尚未支持UPFLOW协议
4.3 如何合理的匹配飞控固件?
从光流和测距传感类型支持广度角度看:
- Ardupilot生态支持的的更好,支持UPFLOW
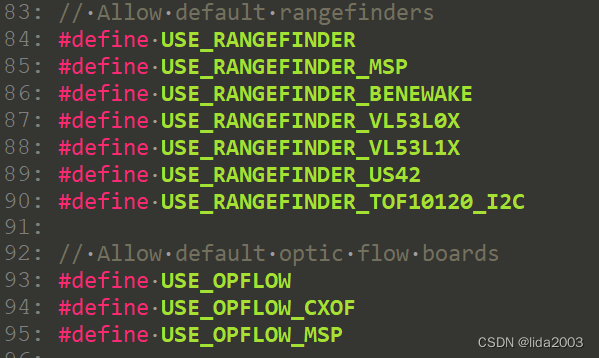
- 而iNav在测距传感主要停留在直接使用I2C的测距芯片:srf10 tof10120 us42 vl5310x vl5311x,虽然benewake串行协议,但是价格相对略贵。
- MATEK 3901-L0X在官网介绍中,也提示如果VL5310x 使能,则可以使用2米以下的定高功能,详见官网或者下面截图。
- 关于VL5310x使能的硬件配置分析(不确定,因为可能还会与嵌入式软件和硬件设计有关)
鉴于上述情况,如果iNav希望使用MATEK 3901-L0X模块,就需要硬件上确认如何使能VL53L0X 芯片,并通过I2C将数据传输到飞控上。
注:VL53L0X 可能与STM32L051/STM32F051连接,至于STM32是否固件上操做I2C控制该芯片,完全取决于软硬件的使能方法。该信息从官网资料上看,并未给出。
该模块使用的参考视频详见:Beginners Guide To Optical Flow Sensor with LIDAR on Drone | MATEKSYS 3901-L0X Optical Flow & LIDAR
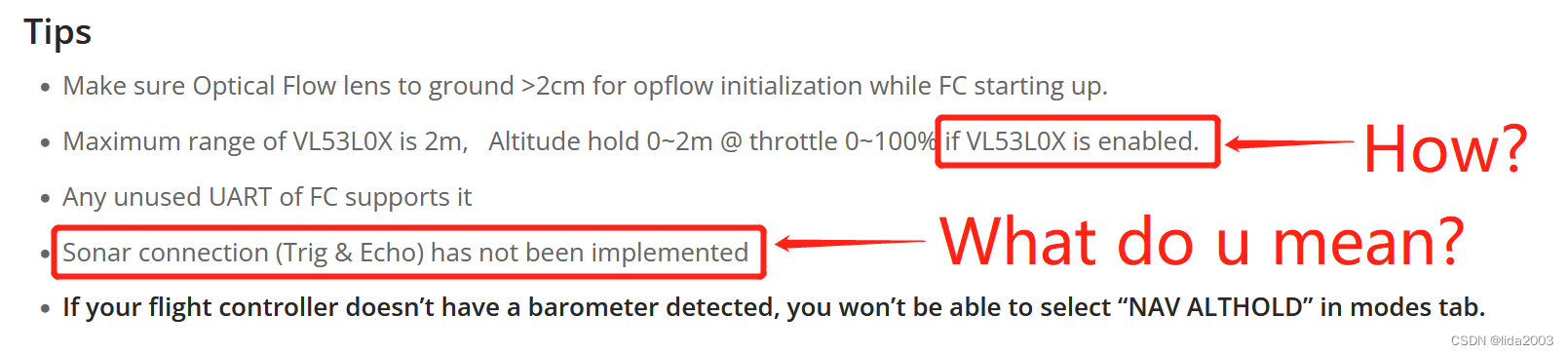
4.4 关于“Sonar connection (Trig & Echo) has not been implemented”的问题?
估计是指MATEKSYS 3901-L0X模块,尚没有支持外接声呐测距功能。
现实情况:
- MATEKSYS 3901-L0X本身是具有激光测距(20mm ~ 2000mm)的VL53L0X Lidar传感器;
- 通常飞控板子都是集成了一个气压计芯片;
- 声呐精度相对于激光测距来说不够精准(通常来说:激光mm级别,声呐cm级别);
初步分析:
- 【猜测】该模块期望解决定高(低空)+ 定位
- 【使用】根据规格总结的使用范围与猜测期望解决问题一致
- 【需求】户外飞行定高定位:通常在GPS+Baro传感融合,效果良好(开阔场地)
- 【需求】户外飞行RTH功能:除了GPS返航,主要是一个自动精准降落,VL53L0X Lidar能够比较好的处理在2米以下高度精准性
- 【猜测】该模块补充声呐硬件接口,怀疑希望做数据融合应对低空的各种场景,比如:水面/复杂地形
不知道是什么原因导致MATEK最后没有将该模块以完整功能投入市场。市场需求(购买力),数据融合效果,技术问题,还是其他问题。虽然硬件接口上都遗留了产品规划的一些构思,但是在实际开发和产品化阶段,停留在现在的情况。
5. iNV - MSP Sensor Protocol (突破)
之前主要是BF代码看的多点,而且拿到了一份upixels的光流激光二合一协议手册,总是纠结在CXOF和UPFLOW上。
src/main/target/common.h
上面的这个角度去看问题,确实会就在iNav在使用MATEK 模块会遇到一些实际问题。
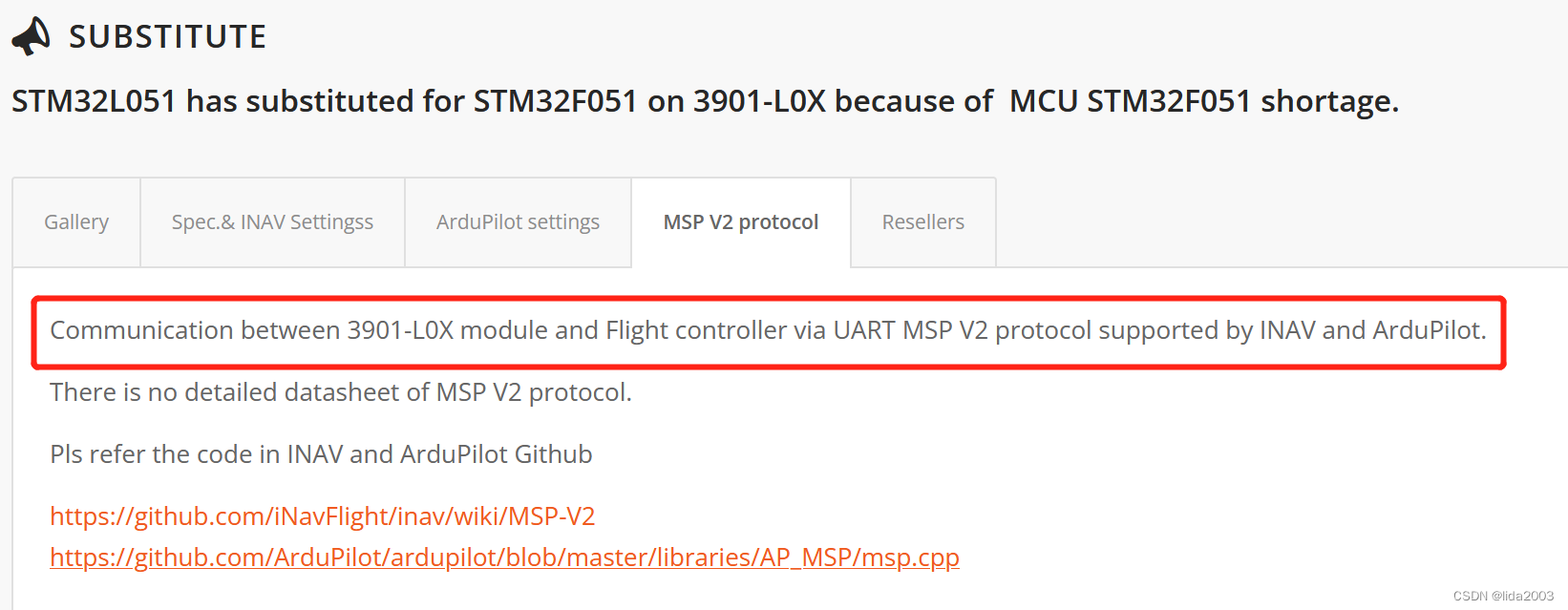
最终,还是仔细看了MATEK官网给出的一个信息,支持MSPV2格式通信协议。
 src/main/fc/fc_msp.c
src/main/fc/fc_msp.c
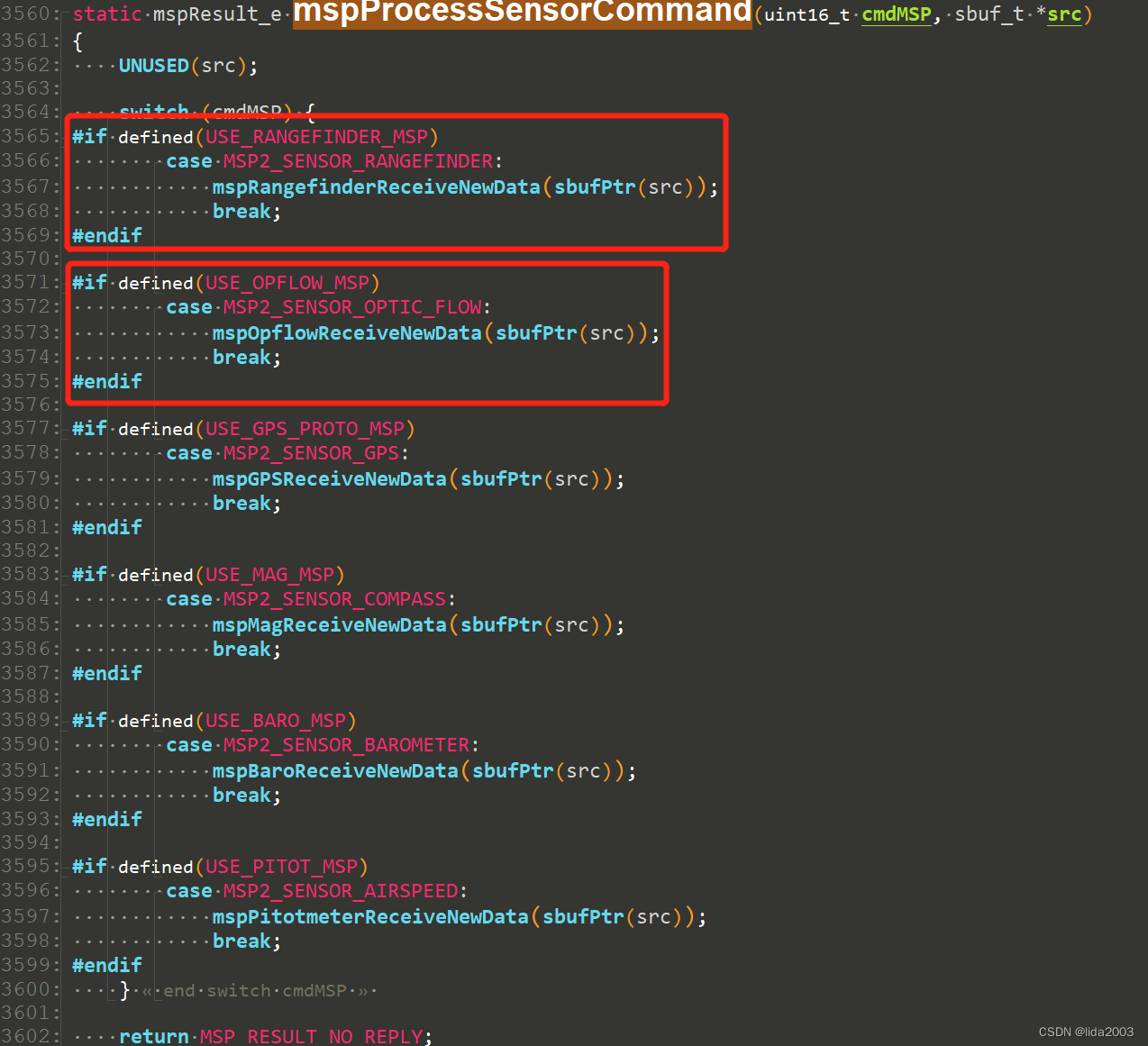
按照上述角度,可以非常清晰的看清传感数据逻辑流程:
PMW3901 Optical Flow Sensor --- SPI ---+|+---> STM32L051/STM32F051 --- TTL(UART/MSP Sensor Protocol) ---> Flight Control|
VL53L0X Lidar Sensor --- I2C ---+
6. MATEK 3901-L0X定位效果
Matek Optical Flow and Lidar Sensor Journey. Part 1
Matek Optical Flow and Lidar Sensor Journey. Part 2
Matek Optical Flow and Lidar Sensor Journey. Part 3
7. 测试效果
目前的效果尚不理想主要存在以下几个问题:
1)【未解决】桨叶有缺损
2)【未解决】螺丝有缺失
3)【待改善】水平校准(iNav多次水平校准 + 遥控器微调,能暂时1~2秒内保持稳定悬停)
4)【待改善】地面花纹(漫反射)
5)【待改善】光照照度需要量化
6)【未解决】定制的posHold算法
iNav
8. 参考资料
【1】Multiwii Serial Protocol Version 2
【2】BetaFlight模块设计之三十二:MSP协议模块分析
【3】iNavFlight之MSP Sensor报文格式