00000000000000000000
相关文章

MPU6050卡尔曼滤波解算姿态角
前言
自己在课上吹的牛,课程作业再麻烦也得干。模了好几天鱼,终于在DDL前一天弄完了惯导模块的简单demo,卡尔曼滤波算是我弄的最久的了(大概2-3天),虽然没有彻底弄懂原理(概率论没学࿰…

00................
作者:龙腾义 拿到本科毕业证与学士学位证已逝一年绰绰有余了,回想这一年我几乎是过着生不如死的生活。毕业那会寻找工作,本以为我只是个应届大学生,初出校园属于低价位的劳动力,这些流言蜚语不该多计较,往上…
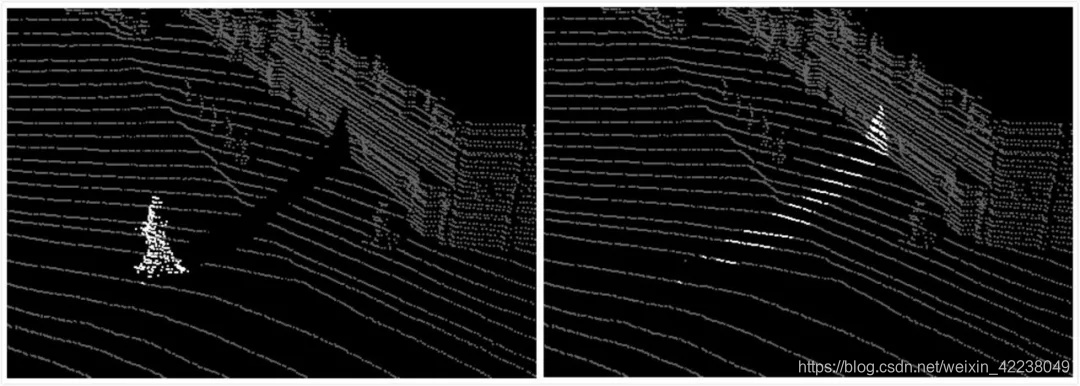
激光雷达目标检测 (上)
前面两篇文章我们了解了卡尔曼滤波以及扩展卡尔曼滤波在目标追踪的应用,我们在上一篇文章中还具体用Python实现了EKF,但是细心的同学会发现,EKF的效率确实很低,计算雅可比矩阵确实是一个很费时的操作,当问题࿰…
Matlab直线一级倒立摆控制方法研究
1 研究背景
倒立摆是一个开环不稳定的强非线性系统,其控制策略与杂技运动员顶杆平衡表演的技巧有异曲同工之处,目的在于使得摆杆处于临界稳定状态,是进行控制理论研究的典型实验平台。20世纪50年代,麻省理工学院的控制论专家根据…
形式语言与自动机 第五章 课后题答案
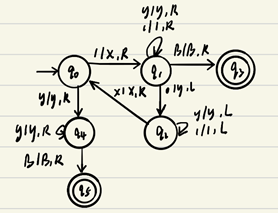
考点:图灵机⇒语言
解:工作过程:首先从 q 0 q_0 q0 将读入的0改为1,读头向右移动到状态 q 1 q_1 q1,然后;读入1则改为0读头向右移动回到状态 q 0 q_0 q0,若读入B则不变,读…
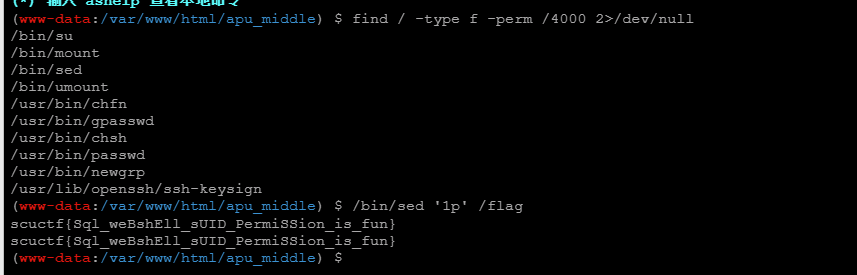
2022SCUCTF
前言
这次出了两个题,但是只放了一个easy_web这个题。镜像我都上传到我的dockerhub里了,自己需要的可以拉取。z3eyond的dockerhub
easy_web
F12,想到了robots.txt,下载源码 下载后开始审计代码,这儿我就不把源码复制过来了。
根据源码的U…
CVE-2021-3129分析
CVE-2021-3129分析 Tag: [[php phar]] | [[php deserialize]] Env搭建 VulEnv/laravel/cve_2021_3129 at master XuCcc/VulEnv Source 分析 根据描述,本质上是由于 facade/ignition 引入的问题,直接查看 ignition 的 commit 记录[^1] 看到 \Facade\Igni…