ROS 版本:18.04
1 从github下载源码
git clone https://github.com/LORD-MicroStrain/microstrain_inertial --recursivegit submodule init && git submodule update --recursive2 创建ros 环境
mkdir -p/imu/src
3 将源码放到你创建的src文件下,直接catkin_make
这时候会报错没有下载c++-mscl_62.1.2_amd64.deb文件
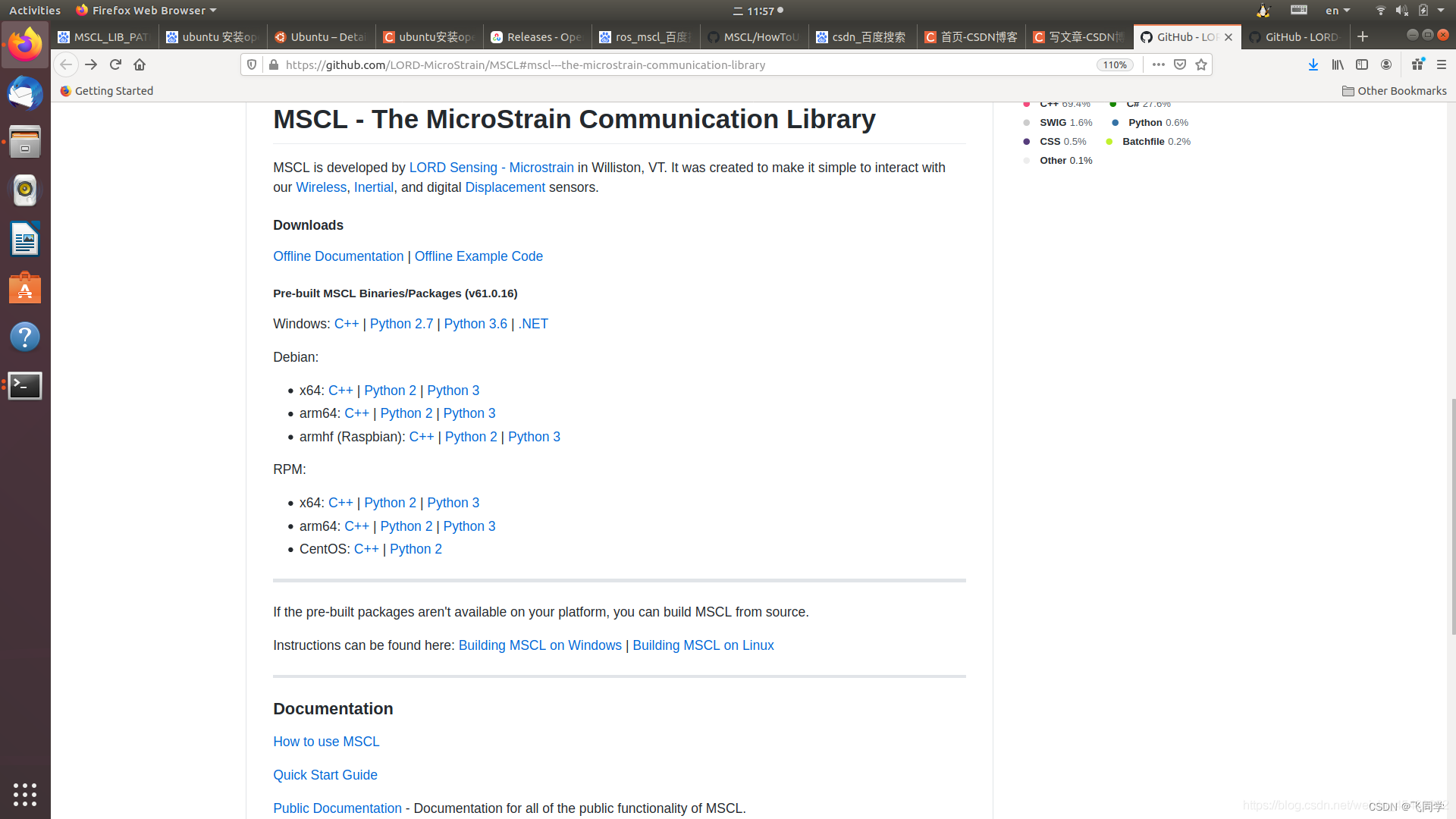
这时候可以从https://github.com/LORD-MicroStrain/MSCL下载.deb文件直接到imu/build/microstrain_inertial/microstrain_inertial_driver下,然后再次catkin_make,顺利通过。
soure devel/setup.bash