如果不需要修改源代码,建议通过apt命令直接安装
sudo apt install ros-melodic-microstrain-inertial-driverroslaunch microstrain_inertial_driver microstrain.launch
二进制安装的lord驱动默认启动launch的接口是/dev/ttyACM0/ ,如果接入设备查看接口是ttyUSB0,需要到config下修改params.yml
gedit /opt/ros/melodic/share/microstrain_inertial_driver/microstrain_inertial_driver_common/config/params.yml

有时安装ros-melodic软件包定位不到资源
E: Invalid operation ros-melodic-microstrain-inertial-driver
无法定位软件包,一般是如果是源问题,可以通过修改源解决:
sudo gedit /etc/apt/sources.list.d/ros-latest.list
添加
deb https://mirrors.ustc.edu.cn/ros/ubuntu/ bionic main
然后执行:
sudo apt-get update
这样就可以正常安装软件包了
sudo apt install ros-melodic-microstrain-inertial-driver
源码安装lord驱动
安装3DM-GX5-AHRS的相关驱动,点击进入选择Debian分类下的x64分类下的c++类别,点击该按钮后自动下载。下载结束后安装.deb文件。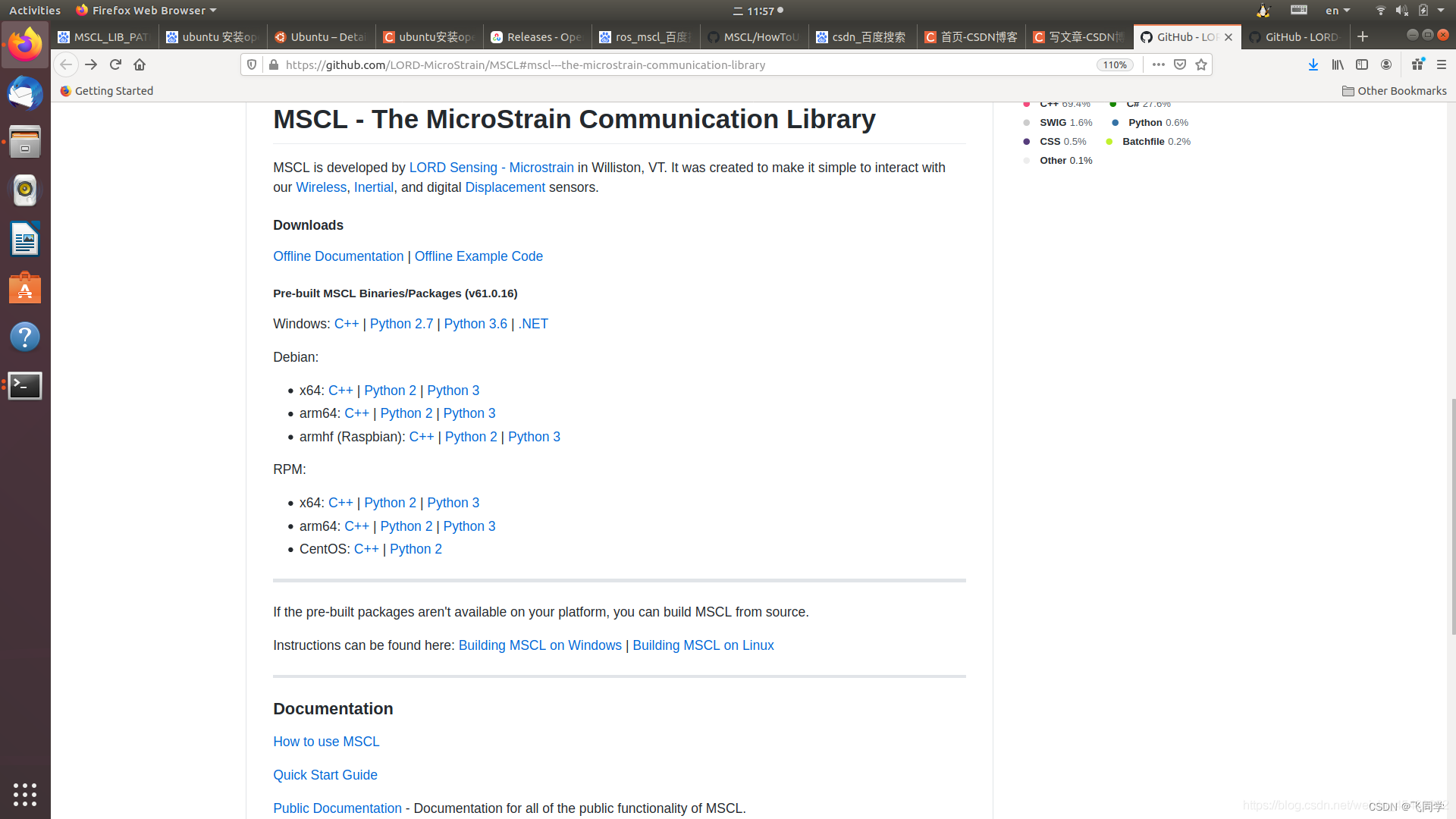
sudo dpkg -i c++-mscl_64.4iUYGdXc.3.0_amd64.deb
sudo apt install -f
安装ros_mscl
上一步装好之后就可以下载 ros_mscl
git clone https://github.com/LORD-MicroStrain/ROS-MSCL.git
catkin_make
出现如下提示,则证明第一步没有装好,需要重新执行驱动安装
CMake Error: The following variables are used in this project, but they are set to NOTFOUND.
Please set them or make sure they are set and tested correctly in the CMake files:
MSCL_LIB_PATHlinked by target "microstrain_inertial_driver" in directory /home/bitcq/catkin_ws/src/ROS-MSCL/microstrain_inertial_driver出现如下提示,则需要安装驱动
Could not find a package configuration file provided by "nmea_msgs" withany of the following names:nmea_msgsConfig.cmakenmea_msgs-config.cmake
sudo apt install ros-melodic-nmea-msgs
ROS-MSCL 已经完全安装完毕运行测试
roslaunch ros_mscl microstrain.launch
可能会出现如下错误
[ INFO] [1612844805.986990924]: Attempting to open serial port </dev/ttyACM0> at <115200>
[ERROR] [1612844805.987572968]: Device Disconnected
[gx5/ros_mscl_node-2] process has finished cleanly
出现该错误的原因是没有给端口授予权限





