1.原理
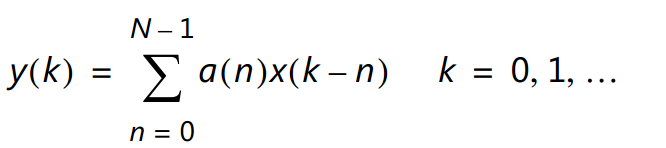
FIR滤波器是非递归型滤波器的简称,又叫有限长单位冲激响应滤波器。带有常系数的FIR滤波器是一种LTI(线性时不变)数字滤波器。冲激响应是有限的意味着在滤波器中没有发反馈。长度为N的FIR输出对应于输入时间序列x(n)的关系由一种有限卷积和的形式给出,具体形式如下:
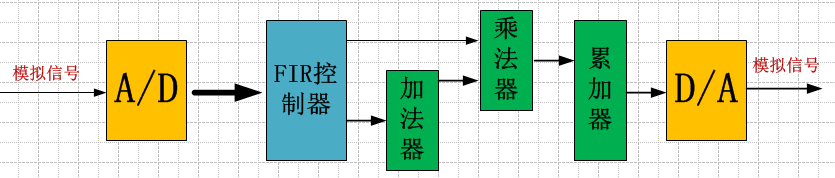
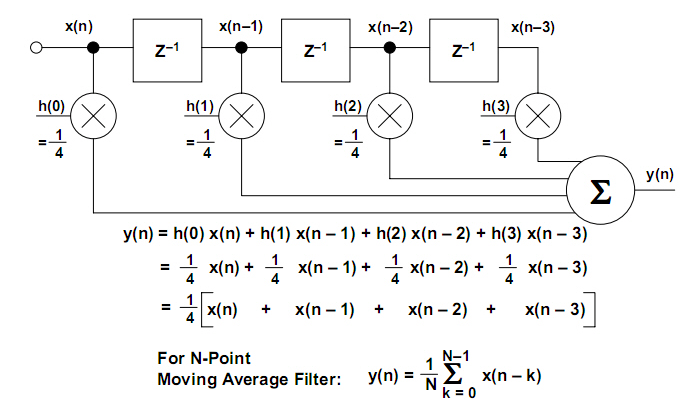
直接形式FIR滤波器图解:

上式表达的是一个N-1阶的FIR滤波器,它有N个抽头(系数)。因此有N个乘法器,N-1个累加器组成。每一个抽头需要消耗逻辑资源的乘法器累加器( Mac )单元。
输入信号是有时间性的,随着时间的改变而改变,FIR滤波器最终的输出是各个时刻的输入乘以相应的权重(系数),然后进行叠加输出:
FIR数字滤波器“移动平均数”为例子:
“移动平均数”就是按我们事先设定的信号个数将输入信号加以平均。譬如,如果我们按每4个信号就做一次平均,那么这个4点的“移动平均数”滤波器就如下图所示:
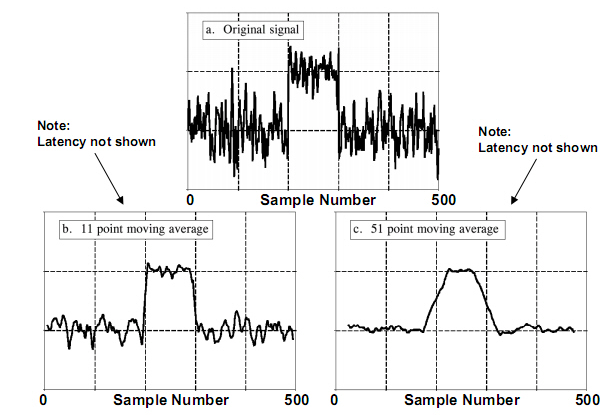
下图是经过11点和51点“移动平均数”滤波器过滤的信号图:
“移动平均数”滤波器的频率响应如下图所示:
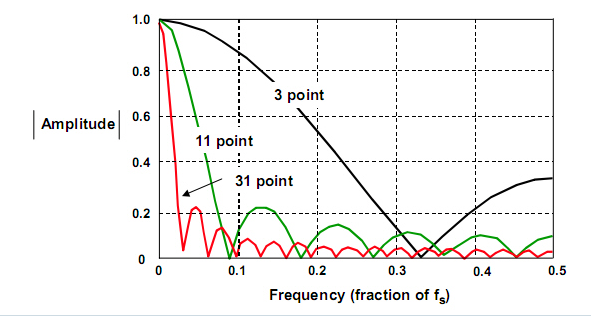
如上图所示,随着点数的增加,滚降(ROLLOFF)变陡了,但对旁瓣(sidelobe,衰减部分)的高低影响不大。但是如果我们考虑对滤波器的每个系数采用不同的权重(加权),而不是像“移动平均数”滤波器那样,用相同的权重(1/4,对4点“移动平均数”滤波器来说),那么可以期待旁瓣的大小会大大的降低。
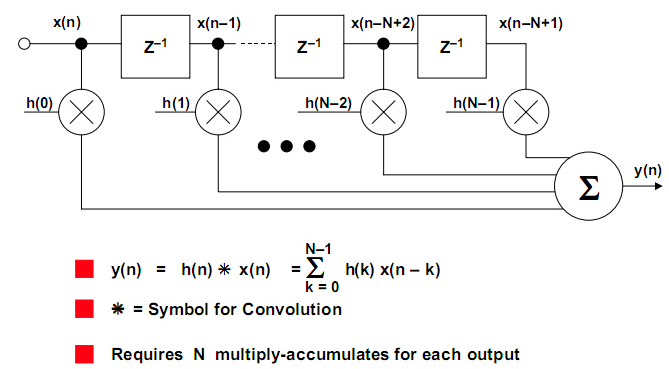
对系数采用不同权重的滤波器,我们可以用下面的数学公式来表达:
2.FPGA实现fir滤波器
2.1在MATLAB中输入fdatool即可打开滤波器设计工具,如图7所示。里面可以设置滤波器的类型,采样频率,截止频率等。本设计设置的参数如图所示。

然后将此滤波器系数导出,然后用以下命令将系数放大、取整:
>> Num=round(Num*256)//将系数放大并取整
num=[ 5 17 43 63 63 43 17 5];
本设计用于仿真的输入波形是2个正弦波叠加而成,分别是5HZ、45HZ。
Fs = 1000; %采样频率决定了两个正弦波点之间的间隔
N = 256; %采样点数
N1 = 0 : 1/Fs : N/Fs-1/Fs;
s = cos(5*2*pi*N1) + cos(45*2*pi*N1) ;%
fidc = fopen('mem.txt','wb'); %将结果写入mem.txt文件,便于modesim使用for x = 1 : NA = round(s(x)*20);%放大if (A >= 0)bin_x = dec2bin(A, 8); % 正数的反码和补码都和原码一样,转换位8位fprintf(fidc,'%s\n',bin_x);elsebin_x = dec2bin(2^8 + A, 8);fprintf(fidc,'%s\n',bin_x);end
end fclose(fidc);
2.verilog
module fir(clk,rst,din,dout,ordy);input clk;input rst;input [7:0] din;output [15:0] dout;output ordy;//matlab fir生成系数 * 256 该滤波器采样率为100Hz,截止频率为10Hzparameter coeff1=8'd5,coeff2=8'd17,coeff3=8'd43,coeff4=8'd63,coeff5=8'd63,coeff6=8'd43,coeff7=8'd17,coeff8=8'd5;//8个寄存器reg signed [7:0] sample_1;reg signed [7:0] sample_2;reg signed [7:0] sample_3;reg signed [7:0] sample_4;reg signed [7:0] sample_5;reg signed [7:0] sample_6;reg signed [7:0] sample_7;reg signed [7:0] sample_8;reg [18:0] dout;reg ordy;//输入数据,移位寄存always @(posedge clk )beginif(rst)beginsample_1 <= 8'd0;sample_2 <= 8'd0;sample_3 <= 8'd0;sample_4 <= 8'd0;sample_5 <= 8'd0;sample_6 <= 8'd0;sample_7 <= 8'd0;sample_8 <= 8'd0;endelsebeginsample_1 <= din;sample_2 <= sample_1;sample_3 <= sample_2;sample_4 <= sample_3;sample_5 <= sample_4;sample_6 <= sample_5;sample_7 <= sample_6;sample_8 <= sample_7;//8个周期完成移位endend//调用ip,执行乘法wire [15:0] p[8:1];mult_8 u1 (.CLK(clk), // input wire CLK.A(sample_1), // input wire [7 : 0] A.B(coeff1), // input wire [7 : 0] B.P(p[1]) // output wire [15 : 0] P 设置pipline stage 为3,表示3级延时
);mult_8 u2 (.CLK(clk), // input wire CLK.A(sample_2), // input wire [7 : 0] A.B(coeff2), // input wire [7 : 0] B.P(p[2]) // output wire [15 : 0] P
);mult_8 u3 (.CLK(clk), // input wire CLK.A(sample_3), // input wire [7 : 0] A.B(coeff3), // input wire [7 : 0] B.P(p[3]) // output wire [15 : 0] P
);mult_8 u4 (.CLK(clk), // input wire CLK.A(sample_4), // input wire [7 : 0] A.B(coeff1), // input wire [7 : 0] B.P(p[4]) // output wire [15 : 0] P
);mult_8 u5 (.CLK(clk), // input wire CLK.A(sample_5), // input wire [7 : 0] A.B(coeff5), // input wire [7 : 0] B.P(p[5]) // output wire [15 : 0] P
);mult_8 u6 (.CLK(clk), // input wire CLK.A(sample_6), // input wire [7 : 0] A.B(coeff6), // input wire [7 : 0] B.P(p[6]) // output wire [15 : 0] P
);mult_8 u7 (.CLK(clk), // input wire CLK.A(sample_7), // input wire [7 : 0] A.B(coeff7), // input wire [7 : 0] B.P(p[7]) // output wire [15 : 0] P
);mult_8 u8 (.CLK(clk), // input wire CLK.A(sample_8), // input wire [7 : 0] A.B(coeff8), // input wire [7 : 0] B.P(p[8]) // output wire [15 : 0] P
);//加法第一级wire [16:0] s1 [4:1];//加法器的延时为2add_16 a1 (.A(p[1]), // input wire [15 : 0] A.B(p[2]), // input wire [15 : 0] B.CLK(clk), // input wire CLK.S(s1[1]) // output wire [16 : 0] S
);add_16 a2 (.A(p[3]), // input wire [15 : 0] A.B(p[4]), // input wire [15 : 0] B.CLK(clk), // input wire CLK.S(s1[2]) // output wire [16 : 0] S
);add_16 a3 (.A(p[5]), // input wire [15 : 0] A.B(p[6]), // input wire [15 : 0] B.CLK(clk), // input wire CLK.S(s1[3]) // output wire [16 : 0] S
);add_16 a4 (.A(p[7]), // input wire [15 : 0] A.B(p[8]), // input wire [15 : 0] B.CLK(clk), // input wire CLK.S(s1[4]) // output wire [16 : 0] S
);//加法第二级wire [17:0] s2 [2:1];add_17 a21 (.A(s1[1]), // input wire [16 : 0] A.B(s1[2]), // input wire [16 : 0] B.CLK(clk), // input wire CLK.S(s2[1]) // output wire [17 : 0] S
);add_17 a22 (.A(s1[3]), // input wire [16 : 0] A.B(s1[4]), // input wire [16 : 0] B.CLK(clk), // input wire CLK.S(s2[2]) // output wire [17 : 0] S
);//加法第三级wire [18:0] s3;add_18 a31 (.A(s2[1]), // input wire [17 : 0] A.B(s2[2]), // input wire [17 : 0] B.CLK(clk), // input wire CLK.S(s3) // output wire [18 : 0] S
);//计数reg [4:0] counter;always @(posedge clk)beginif(rst)begincounter <= 5'd0;dout <= 19'd0;ordy <= 1'b0;endelse if(counter == 17)begindout <= s3;ordy <= 1'b1;endelsebegindout <= 19'd0;counter <= counter + 1'b1;endend
endmodule
由于抽头系数N=8,滤波的效果不是太好,可以采用更高阶数的fir滤波器,这里只是做个演示,有何错误之处还请指教!!