watershed
- 参考
- 分水岭算法
- 代码
- opencv
- scikit-image
参考
scikit_image中的watershed说明
OpenCV—图像分割中的分水岭算法原理与应用
图像分割的经典算法:分水岭算法
分水岭算法

上图可以描述传统的分水岭算法,这样的算法可能会导致分割过细,遇事有了升级版的,就是在之前的基础上,给定一写标记,
基于标记的分水岭算法,水淹过程从预先定义好的标记图像(像素)开始,较好的克服了过度分割的不足。本质上讲,基于标记点的改进算法是利用先验知识来帮助分割的一种方法。因此,改进算法的关键在于如何获得准确的标记图像,即如何将前景物体与背景准确的标记出来。
分水岭算法的整个过程:
- 把梯度图像中的所有像素按照灰度值进行分类,并设定一个测地距离阈值。
- 找到灰度值最小的像素点(默认标记为灰度值最低点),让threshold从最小值开始增长,这些点为起始点。或者使用标记点作为起始点。
- 水平面在增长的过程中,会碰到周围的邻域像素,测量这些像素到起始点(灰度值最低点)的测地距离,如果小于设定阈值,则将这些像素淹没,否则在这些像素上设置大坝,这样就对这些邻域像素进行了分类。
代码
opencv
import cv2
import numpy as npimg_pth = "./pannuke_pic/sample.png"
img = cv2.imread(img_pth )gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)ret, thresh = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
# noise removal
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (3,3))
opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations=2)sure_bg = cv2.dilate(opening, kernel, iterations=2) # sure background area
sure_fg = cv2.erode(opening, kernel, iterations=2) # sure foreground area
unknown = cv2.subtract(sure_bg, sure_fg) # unknown area# Perform the distance transform algorithm
dist_transform = cv2.distanceTransform(opening, cv2.DIST_L2, 5)# Normalize the distance image for range = {0.0, 1.0}
cv2.normalize(dist_transform, dist_transform, 0, 1.0, cv2.NORM_MINMAX)# Finding sure foreground area
ret, sure_fg = cv2.threshold(dist_transform, 0.5*dist_transform.max(), 255, 0)# Finding unknown region
sure_fg = np.uint8(sure_fg)
unknown = cv2.subtract(sure_bg,sure_fg)
scikit-image
import numpy as np
import matplotlib.pyplot as plt
from scipy import ndimage as ndifrom skimage.segmentation import watershed
from skimage.feature import peak_local_max# Generate an initial image with two overlapping circles
x, y = np.indices((80, 80))
x1, y1, x2, y2 = 28, 28, 44, 52
r1, r2 = 16, 20
mask_circle1 = (x - x1)**2 + (y - y1)**2 < r1**2
mask_circle2 = (x - x2)**2 + (y - y2)**2 < r2**2
image = np.logical_or(mask_circle1, mask_circle2)# Now we want to separate the two objects in image
# Generate the markers as local maxima of the distance to the background
distance = ndi.distance_transform_edt(image)
coords = peak_local_max(distance, footprint=np.ones((3, 3)), labels=image)
mask = np.zeros(distance.shape, dtype=bool)
mask[tuple(coords.T)] = True
markers, _ = ndi.label(mask)
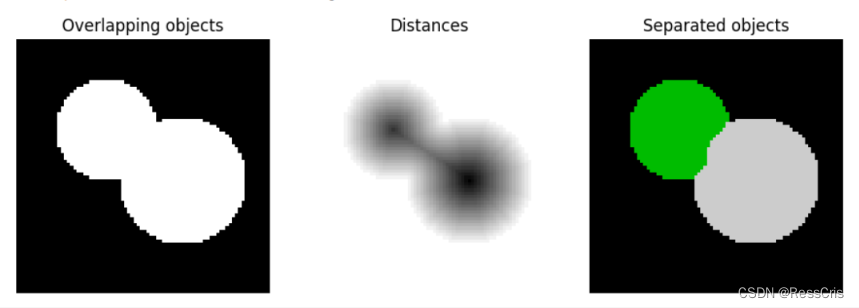
labels = watershed(-distance, markers, mask=image)fig, axes = plt.subplots(ncols=3, figsize=(9, 3), sharex=True, sharey=True)
ax = axes.ravel()ax[0].imshow(image, cmap=plt.cm.gray)
ax[0].set_title('Overlapping objects')
ax[1].imshow(-distance, cmap=plt.cm.gray)
ax[1].set_title('Distances')
ax[2].imshow(labels, cmap=plt.cm.nipy_spectral)
ax[2].set_title('Separated objects')for a in ax:a.set_axis_off()fig.tight_layout()
plt.show()