垂起固定翼、多旋翼无人机与自组网的结合,为高低空域协同组网通信技术提供了创新的解决方案。这种结合充分利用了各种技术的优势,使得无人机在高低空域中的协同作业和通信更加高效和灵活。
首先,垂起固定翼无人机以其垂直起降能力和长航时的特点,适合在高空域进行侦察、监视和通信中继等任务。多旋翼无人机则以其灵活的飞行能力和稳定的悬停性能,在低空域进行精细作业和拍摄任务。这两种无人机在高低空域中协同作业,可以充分发挥各自的优势,完成更复杂的任务。

垂起固定翼无人机介绍:
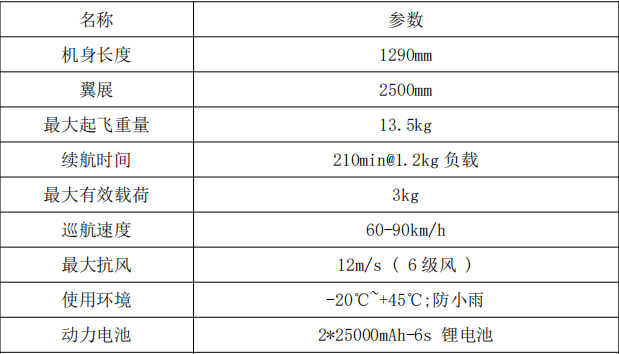
复合翼无人机是电动长航时垂直起降固定翼无人机,采用固定翼结合四旋翼的复合翼布局形式,具备垂直起降,续航时间长、航程远、噪声小、安全性能高、可靠性高、环境适应能力强的特点。垂直起降固定翼无人机兼具多旋翼垂直起降和固定翼平飞模式,该无人机能在山区、丘陵、丛林等复杂地形和建筑物密集的区域顺利作业,极大扩展了无人机应用范围,是工业级无人机的理想选择。
参数推荐:
而自组网技术则为这些无人机提供了高效、可靠的通信手段。自组网是一种移动通信和计算机网络相结合的网络,它可以在没有基础设施支持的情况下,通过节点之间的相互协作,形成一个临时的通信网络。这种网络具有动态性、自适应性和鲁棒性等特点,非常适合无人机这种需要快速部署、灵活调整的应用场景。
自组网介绍:
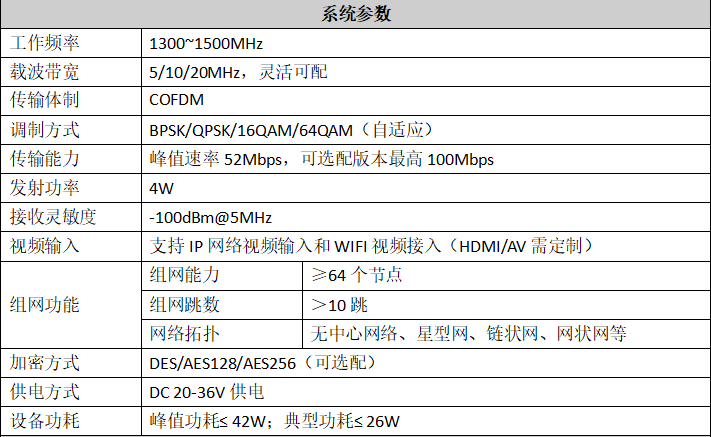
自组网电台,体积小、重量轻,方便安装,特别适合无人机、无人车、无人艇、机器人、等具备轻量化组网需求的应用场景。快速入网、自动多跳中继,可与手持单兵系统、车载系统以及周边基站组网设备快速组建互联互通的立体网络, 实现高效协同。兼具:北斗定位功能,同时也支持wifi覆盖,可配合 wifi功能的智能终端进行各种通信。系统采用同频组网、多跳中继,支持任意网络拓扑结构,如点对点、点对多点、链状中继、网状网络及混合网络拓扑等。可为应急处突、反恐防暴、隐蔽侦察、特种作战、抢险救灾、日常巡逻等“平急战”任务,第一时间提供无线宽带通信。传输距离:地面开阔环境可达10km以上,阻挡环境下300~1000m(视阻挡环境而定),空中到地面大于30km。

参数推荐:
在高低空域协同组网通信技术中,垂起固定翼无人机和多旋翼无人机通过自组网技术实现信息的实时传输和指令的传递。垂起固定翼无人机可以将收集到的情报和数据通过自组网传输给多旋翼无人机,多旋翼无人机则可以根据这些信息进行精确的飞行控制和作业执行。同时,自组网技术还可以实现无人机之间的协同控制和决策,使得整个无人机系统更加智能化和高效化。
多旋翼无人机介绍:
无人机采用碳纤维材料,重量轻、强度高、防腐蚀能力强。采用电动六旋翼布局,折叠机臂,可实现10kg-30kg载重飞行能力,具有飞行时间长,覆盖距离远特点,同时满足雨中飞行技术要求。

总的来说,垂起固定翼、多旋翼无人机与自组网的结合,为高低空域协同组网通信技术提供了强大的支持。这种技术不仅可以提高无人机的作业效率和通信能力,还可以为无人机在军事、民用等领域的应用提供更加广阔的前景。同时,随着技术的不断发展和完善,这种高低空域协同组网通信技术将在未来发挥更加重要的作用。
这种结合垂起固定翼、多旋翼无人机与自组网的技术从多个方面提高了无人机在高低空域中的协同作业效率:
1. 信息实时共享:自组网技术允许无人机之间实时传输和接收数据,这包括图像、位置信息、传感器数据等。这种实时信息共享使得无人机之间能够协同工作,减少重复或无效的工作,并提高整体作业效率。
2. 任务分配与优化:结合自组网的智能决策算法,可以根据无人机的性能和任务需求进行任务的动态分配。例如,垂起固定翼无人机可以在高空进行大范围侦察,将收集到的数据传输给多旋翼无人机进行低空精细作业。这样的任务分配可以使无人机充分利用各自的优势,提高作业效率。
3. 协同导航与控制:通过自组网的协同导航与控制技术,无人机之间可以实现协同飞行,避免相互干扰和碰撞。无人机可以根据其他无人机的位置和状态信息进行动态调整,确保整个系统的流畅运行。
4. 灵活适应不同环境:自组网的动态性和自适应性使得无人机系统能够灵活适应不同的飞行环境和任务需求。即使在复杂多变的环境中,无人机也能快速调整策略和任务分配,确保协同作业的高效进行。
5. 可扩展性和模块化:自组网技术允许无人机系统进行模块化的扩展和升级。随着新类型无人机或新技术的加入,整个系统可以轻易地进行集成和调整,以保持或提高协同作业的效率。
6. 降低人为干预:通过自动化和智能化的协同作业控制,可以降低对人为干预的依赖。这不仅可以减少人为错误,还可以使无人机系统更加适合在无人值守或危险环境下工作。
如果觉得不错,关注,点赞,转发安排起来吧!
其他联系微信: dh2541