卡尔曼滤波
2024/9/25 5:29:09

mpu6050姿态解算与卡尔曼滤波(5)可应用于51单片机的卡尔曼滤波器
博客4中给出的滤波器状态维数为4维,测量量为3维,每次滤波需要做不少矩阵乘法和求逆运算。如果想在51单片机上实现,计算耗时会比较长。考虑应用场合可以对滤波器适当做一些简化,计算量会大大减小。 首先,陀螺和加速度计…

【嵌入式硬件开发基础】Arduino板常用外设及应用:MPU6050空间运动传感器(简介,类库函数,卡尔曼滤波),继电器(原理介绍,含应用实例/代码)
当一个人不能拥有的时候,他唯一能做的便是不要忘记。 🎯作者主页: 追光者♂🔥 🌸个人简介: 📝[1] CSDN 博客专家📝 🏆[2] 人工智能领域优质创作者🏆 🌟[3] 2022年度博客之星人工智能领域TOP4🌟 🌿[4] 2023年城市之星领跑者TOP1(哈尔滨…
高翔【自动驾驶与机器人中的SLAM技术】学习笔记(六)卡尔曼滤波器二:图解卡尔曼滤波器;卡尔曼滤波器公式理解;面试答法;
上一篇卡尔曼滤波器一中,从整体上认识了,卡尔曼滤波器整体是在做一件什么事。
知道了,协方差就可以理解为偏差,或者误差。
这一篇主要讲卡尔曼滤波器中的公式,理解公式,就能知道如何实现卡尔曼滤波器。
上一篇:卡尔曼滤波器在做一件什么事,这一篇,卡尔曼滤波器怎么…

DeepSORT(目标跟踪算法)中卡尔曼增益的理解
DeepSORT(目标跟踪算法)中卡尔曼增益的理解
flyfish
先用最简单的例子来理解卡尔曼增益
公式 (1)
首先,通过多次测量一个物理量,并使用取平均值的方式来计算其真实值: x ^ k 1 k ( z 1 z 2 ⋯ z k ) \hat{x}_…
mpu6050姿态解算与卡尔曼滤波(5)可应用于51单片机的卡尔曼滤波器
博客4中给出的滤波器状态维数为4维,测量量为3维,每次滤波需要做不少矩阵乘法和求逆运算。如果想在51单片机上实现,计算耗时会比较长。考虑应用场合可以对滤波器适当做一些简化,计算量会大大减小。 首先,陀螺和加速度计…
mpu6050姿态解算与卡尔曼滤波(5)可应用于51单片机的卡尔曼滤波器
博客4中给出的滤波器状态维数为4维,测量量为3维,每次滤波需要做不少矩阵乘法和求逆运算。如果想在51单片机上实现,计算耗时会比较长。考虑应用场合可以对滤波器适当做一些简化,计算量会大大减小。 首先,陀螺和加速度计…
mpu6050姿态解算与卡尔曼滤波(5)可应用于51单片机的卡尔曼滤波器
博客4中给出的滤波器状态维数为4维,测量量为3维,每次滤波需要做不少矩阵乘法和求逆运算。如果想在51单片机上实现,计算耗时会比较长。考虑应用场合可以对滤波器适当做一些简化,计算量会大大减小。 首先,陀螺和加速度计…
高翔【自动驾驶与机器人中的SLAM技术】学习笔记(六)卡尔曼滤波器二:图解卡尔曼滤波器;卡尔曼滤波器公式理解;面试答法;
上一篇卡尔曼滤波器一中,从整体上认识了,卡尔曼滤波器整体是在做一件什么事。
知道了,协方差就可以理解为偏差,或者误差。
这一篇主要讲卡尔曼滤波器中的公式,理解公式,就能知道如何实现卡尔曼滤波器。
上一篇:卡尔曼滤波器在做一件什么事,这一篇,卡尔曼滤波器怎么…

高翔【自动驾驶与机器人中的SLAM技术】学习笔记(五)卡尔曼滤波器一:认知卡尔曼滤波器;协方差矩阵与方差;
卡尔曼滤波器 为了研究卡尔曼,我阅读了大量博文。不敢说完全吃透,但是在做一件什么事,可以通过下面这文章来理解,我读了不下五遍。并整理标准重点,添加自己的一些见解。
自动驾驶传感器融合算法 - 自动驾驶汽车中的激…
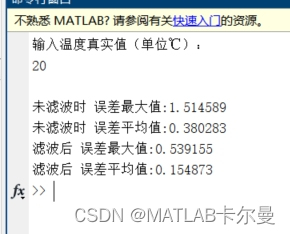
带交互的卡尔曼滤滤波|一维滤波|源代码
背景
一维卡尔曼滤波的MATLAB例程,背景为温度估计。
代码介绍
运行程序后,可以自己输入温度真实值:
以20℃为例,得到如下的估计值:
滤波前的值和滤波后的值分别于期望值(真实值)作差…

PSINS工具箱函数介绍——kfinit
kfinit是kf的参数初始化函数,用于初始化滤波参数
本文所述的代码需要基于PSINS工具箱,工具箱的讲解:
PSINS初学指导基于PSINS的相关程序设计(付费专题)
使用方法
kfinit这个函数的字面意思是:kf的初始化…
mpu6050姿态解算与卡尔曼滤波(5)可应用于51单片机的卡尔曼滤波器
博客4中给出的滤波器状态维数为4维,测量量为3维,每次滤波需要做不少矩阵乘法和求逆运算。如果想在51单片机上实现,计算耗时会比较长。考虑应用场合可以对滤波器适当做一些简化,计算量会大大减小。 首先,陀螺和加速度计…