激光雷达RPLIDAR A1使用教程
一.雷达硬件连接
1.A1雷达包含组件
RPLIDAR A1开发套装包含了如下组件:
o RPLIDAR A1模组(内置 PWM电机驱动器)
o USB适配器
o RPLIDAR A1模组通讯排线
注意:另需自备 USB线缆用于连接。
2.A1雷达接线方式
- 将开发套装中提供的信号连接排线分别与 RPLIDAR A1模组及 USB适配器进行连接。RPLIDAR A1模组的对应接口插座位于模组的底部。
 2) 将USB适配器通过Micro-USB线缆与PC连接。如果PC已经启动,在USB线缆连接后,可以观测到RPLIDAR A1底部的电源指示灯点亮,并且RPLIDAR A1开始转动。
2) 将USB适配器通过Micro-USB线缆与PC连接。如果PC已经启动,在USB线缆连接后,可以观测到RPLIDAR A1底部的电源指示灯点亮,并且RPLIDAR A1开始转动。

二.USB适配器驱动程序安装
USB驱动包下载链接:USB驱动包
USB 适配器采用 CP2102 芯片实现串口(UART)至 USB 信号的转换。因此需要在PC系统中安装对应的驱动程序。其驱动程序可以在配套的 SDK包中找到,或者从 Silicon Labs的官方网站中下载: http://www.silabs.com/products/interface/usb-bridges/Pages/usb-bridges.aspx 这里以 Windows系统下为例,演示安装过程。 通过前几步操作将 USB 适配器与 PC 相连后,执行 CP2102 的Windows 驱动程序安装文件(CP210x VCP Windows)。请按照操作系统的版本选择执行 32位版本(x86)或者 64位版本(x64)的安装程序。
 按照系统提示完成安装过程后,可以右击[此电脑]->[属性]->[设备管理器]窗口中看到识别到的USB适配器所对应的串口名。(下图为 COM13)
按照系统提示完成安装过程后,可以右击[此电脑]->[属性]->[设备管理器]窗口中看到识别到的USB适配器所对应的串口名。(下图为 COM13)

三.雷达可视化查看
1.安装RoboStudio
软件安装链接:RoboStudio安装包
SLAMTEC在机器人管理与开发软件 RoboStudio中提供了可视化插件 Lidars用于评估和调试。通过该插件,用户可以直观地观测RPLIDAR 实时的测距扫描结果,并且可以保存测距结果至外部文件供进一步分析。 目前该软件需要运行在 Windows平台下,对于 Linux和 MacOS用户,可以使用SDK中提供的其他示例程序。 请确保 RPLIDAR A1模组已经通过 USB转接器连接至 PC,且已经安装了前文所述的驱动程序。运行 RoboStudio,注册账号并登陆。

2.使用RoboStudio
安装成功以后,如果连接正常,则将看到如下界面,点击文件->雷达选项,左侧弹出雷达浮动
窗口如下图所示:  然后右击雷达面板空白处>手动连接雷达,选择对应的串口号即可。(通常A1&A2的波特率为115200,A2M7比较特殊,其波特率为256000,A3&S1为256000。)
然后右击雷达面板空白处>手动连接雷达,选择对应的串口号即可。(通常A1&A2的波特率为115200,A2M7比较特殊,其波特率为256000,A3&S1为256000。)
 其中串口下列出的雷达显示了当前连接雷达的序列号、版本信息。所有对RPLIDAR可进行的操作均已在工具栏列出:
其中串口下列出的雷达显示了当前连接雷达的序列号、版本信息。所有对RPLIDAR可进行的操作均已在工具栏列出:
 点击开始扫描按钮 ,则可以在主工作区中看到当前的扫描图,默认电机旋转参数设定在 8hz左右。在主工作区鼠标右键菜单中可以选择不同的测距范围从而实现对扫描画面的缩放。 测距核心的扫描速度(转速)可以通过画面最后的文字读出。如图:
点击开始扫描按钮 ,则可以在主工作区中看到当前的扫描图,默认电机旋转参数设定在 8hz左右。在主工作区鼠标右键菜单中可以选择不同的测距范围从而实现对扫描画面的缩放。 测距核心的扫描速度(转速)可以通过画面最后的文字读出。如图:

四. 故障排除
在内部测距系统工作异常或激光器发射功耗异常时,测距核心将自动进入保护状态。演示工具以及 SDK接口可以获得当前测距核心的工作状态。如果发生故障,则可发送重启命令 要求测距核心重启。
五.RPLIDAR A1模块引脚规格与定义
开发套装中 RPLIDAR A1 模块底部电机接口和核心接口分别采用 PH1.25-3P 和PH1.25-4P 的立贴座。用户可以使用带有 1.25 间距 3pin 和 1.25 间距 4pin 端子的线缆与其连接。其信号定义如下:

 外部系统必须给 VMOTO 以及 V5.0 同时提供符合要求的供电,方可使得RPLIDAR A1 的测距核心以及扫描电机工作。在要求不高的场合,VMOTO 以及V5.0可以共用同一组电源。 MOTOCTL 引脚可以用以控制电机的运行或者定转控制,也可以使用 PWM信号对电机的旋转速度进行调制,从而控制 RPLIDAR A1扫描频率。
外部系统必须给 VMOTO 以及 V5.0 同时提供符合要求的供电,方可使得RPLIDAR A1 的测距核心以及扫描电机工作。在要求不高的场合,VMOTO 以及V5.0可以共用同一组电源。 MOTOCTL 引脚可以用以控制电机的运行或者定转控制,也可以使用 PWM信号对电机的旋转速度进行调制,从而控制 RPLIDAR A1扫描频率。
参考系统设计:

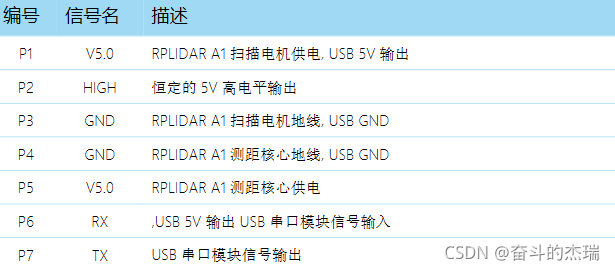
六.USB适配器引脚定义
USB 适配器采用 1.25mm 间距 7pin 插座,并通过通讯线缆与 RPLIDAR A1 模块对接。其引脚定义如下: