思岚A1激光雷达
前言
先来了解激光雷达
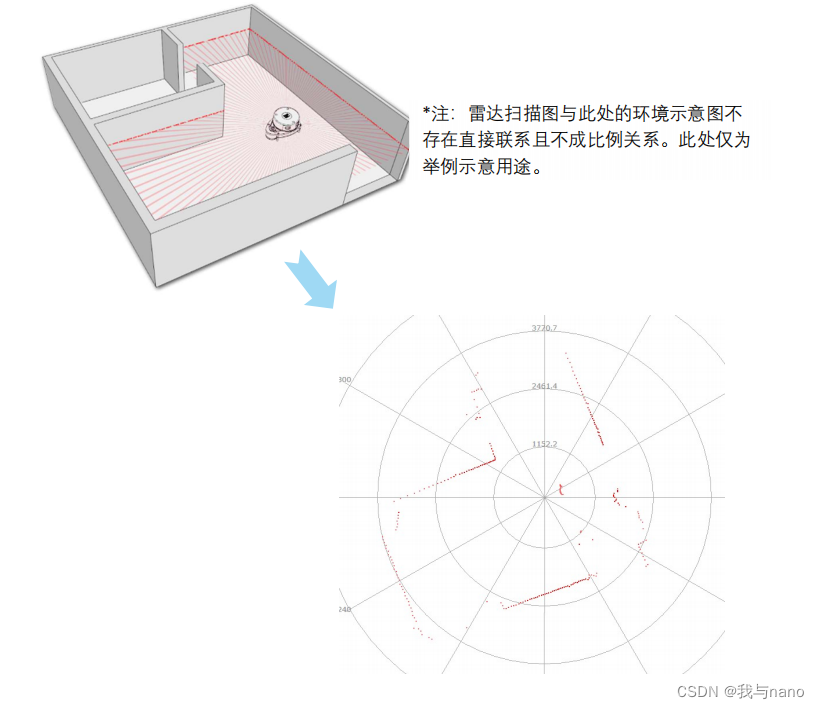
RPLIDAR A1M8 360 度激光扫描测距雷达是由 SLAMTEC 公司开发的低成本二维激光雷达(LIDAR)解决方案。它可以实现在二维平面的 12 米半径范围内进行 360度全方位的激光测距扫描,并产生所在空间的平面点云地图信息。这些云地图信息可用于地图测绘、机器人定位导航、物体/环境建模等实际应用中。
在将采样周期设为 1450 点采样/周的条件下,RPLIDAR 扫描频率达 5.5hz,并且最高可达 10hz 的扫描频率。 RPLIDAR 采用由 SLAMTEC 研发的低成本的激光三角测距系统,在各种室内环境
以及无日光直接照射的室外环境下均表现出色。
一、系统构成及连接
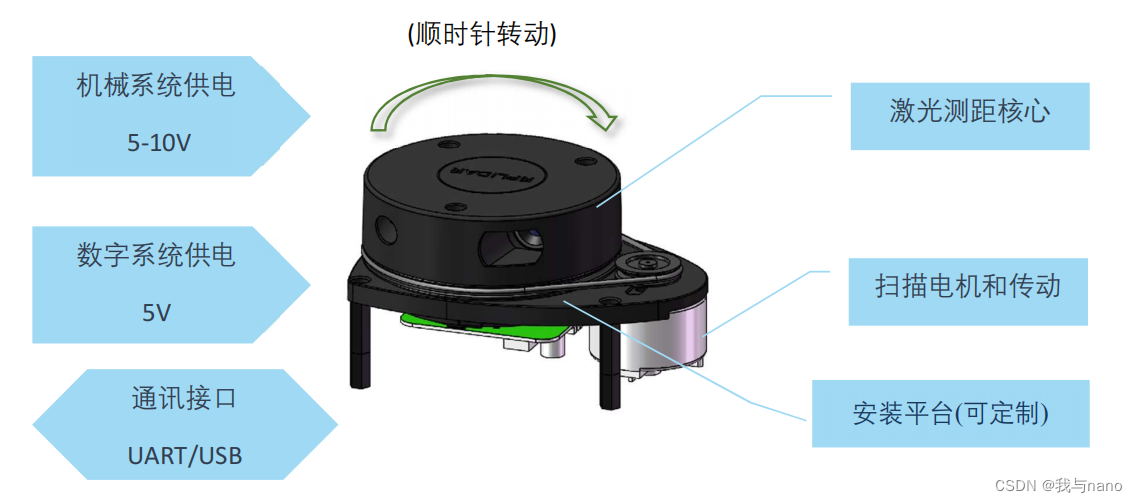
RPLIDAR A1 主要分为激光测距核心以及使得激光测距核心高速旋转的机械部分。在分别给各子系统供电后,测距核心将开始顺时针旋转扫描。用户可以通过RPLIDAR A1 的通讯接口(串口/USB 等)获取 RPLIDAR 的扫描测距数据。
既然串口传输数据,那么我们就能使用在单片机上,只是数据传输格式以及数据解析的问题了。
二、工作原理和使用
1.工作原理
RPLIDAR A1 采用了激光三角测距技术,配合 SLAMTEC 研发的高速的视觉采集处理机构,可进行每秒高达 8000 次以上的测距动作。每次测距过程中,RPLIDAR A1 将发射经过调制的红外激光信号,该激光信号在照射到目标物体后产生的反光将被 RPLIDAR A1 的视觉采集系统接受。经过嵌入在 RPLIDAR A1 内部的 DSP 处理器实时解算,被照射到的目标物体与 RPLIDAR A1 的距离值以及当前的夹角信息将从通讯接口中输出。
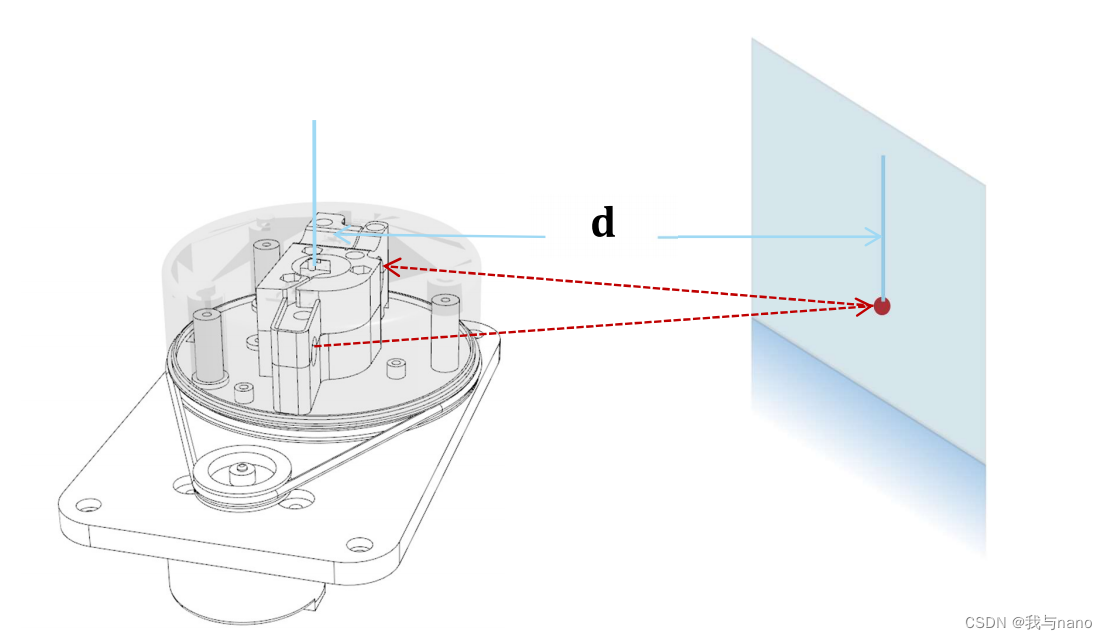
在电机机构的驱动下 RPLIDAR A1 的测距核心将进行顺时针旋转,从而实现对360 度全方位环境的扫描测距检测。
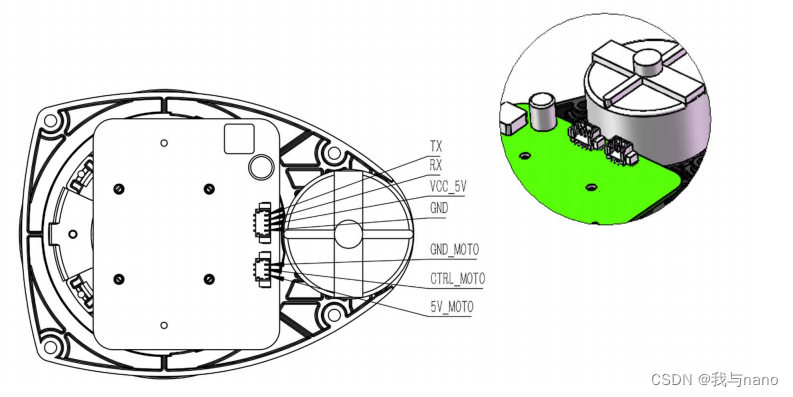
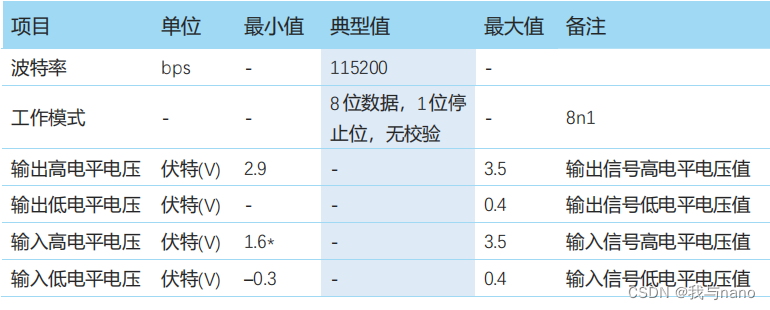
2.通讯与接口
RPLIDAR A1 标准配置采用 3.3V 电平的串口(UART)作为通讯接口
总结
有了这些我们就能在32上使用了,下面我们来进行32实战。