无人车,也被称为自动驾驶汽车、电脑驾驶汽车或轮式移动机器人,是一种通过电脑系统实现无人驾驶的智能汽车。这种汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,使得电脑可以在没有任何人类主动操作的情况下,自动安全地操作机动车辆。

无人机和无人车之间的自组网协同技术是一种重要的研究方向,它可以实现无人机和无人车之间的信息共享、协同控制和协同任务执行等功能。以下是无人机和无人车自组网协同技术的一些关键方面:
1. 通信机制:自组网协同技术的通信机制是实现无人机和无人车之间信息共享和协同控制的基础。通信机制需要支持高速、稳定、低延迟的数据传输,以及可靠的通信协议和路由算法。
2. 数据融合与处理:无人机和无人车各自配备了多种传感器,如摄像头、激光雷达、GPS等。通过将这些传感器的数据进行融合和处理,可以获得更准确、全面的环境信息,为协同控制和任务执行提供决策依据。
3. 协同控制:协同控制是实现无人机和无人车之间协同工作的关键。协同控制算法需要根据任务需求、环境信息和无人机/无人车的状态,动态调整无人机和无人车的运动轨迹和协同策略,以实现最佳的任务执行效果。
4. 任务分配与调度:在复杂的任务场景中,需要将任务分配给不同的无人机和无人车,并进行合理的调度。任务分配与调度算法需要考虑到任务的优先级、无人机/无人车的性能和状态等因素,以实现任务的高效执行。
5. 安全性保障:在无人机和无人车协同执行任务的过程中,需要保障整个系统的安全性。这包括防止通信中断、避免碰撞和冲突、保障数据安全等。
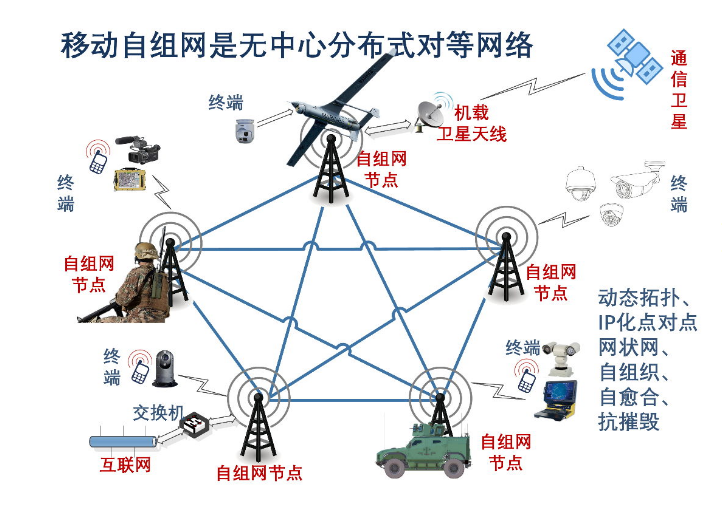
协同所需自组网产品技术:
自组网基站是一套采用SDR技术实现的自组网专网通信系统,可为视频、语音、数据等基于IP的多媒体业务提供透明的传输通道。无需依赖基础通信设施,无需人工配置,即可实现随时随地快速组建通信网络。产品具有稳定可靠、机动性、远距离、高带宽、抗多径能力强等特点,能用于复杂地形条件下快速部署现场网络,利用无中心、多跳连接、动态组网的特性,加强机动场景下的通信能力。该产品具有频谱认知能力,抗干扰能力强,并可支持1000跳/秒的跳频工作模式。最大通信速率大于50Mbps。
自组网产品特点:
-
接口丰富:支持网口、语音、WIFI、4G、北斗GPS、HDMI等多种接口
-
多种业务数据:支持视频、语音、位置、传感器等各类基于IP的数据传输
-
机动性强:支持移动环境下使用,满足高低温、振动等环境适应性要求
-
抗干扰能力强:支持自动频谱迁移、跳频工作模式
-
通信速率高:支持MIMO多天线技术,最大通信速率大于50Mbps
无人机和无人车自组网协同技术的应用前景非常广泛,涉及多个领域,以下是一些主要的应用前景:
1. 物流运输:无人机和无人车可以在物流领域实现协同运输,无人机负责空中运输,无人车负责地面运输,通过自组网协同技术实现信息的实时共享和协同决策,提高物流运输的效率和准确性。
2. 灾害救援:在灾害救援领域,无人机和无人车可以协同工作,无人机可以在空中进行灾情侦查、搜救定位等任务,无人车可以在地面进行物资运输、人员疏散等任务,通过自组网协同技术实现信息的实时共享和协同决策,提高灾害救援的效率和安全性。
3. 军事侦察:在军事侦察领域,无人机和无人车可以协同进行情报侦察、目标跟踪等任务,无人机可以在空中进行大范围侦察,无人车可以在地面进行细致搜索,通过自组网协同技术实现信息的实时共享和协同决策,提高军事侦察的效率和准确性。
4. 智能交通:在智能交通领域,无人机和无人车可以协同实现交通监控、路况分析、车辆调度等任务,通过自组网协同技术实现交通信息的实时共享和协同决策,提高交通系统的效率和安全性。
5. 农业监测:在农业领域,无人机和无人车可以协同进行农田监测、作物生长分析、精准施肥等任务,通过自组网协同技术实现农田信息的实时共享和协同决策,提高农业生产的效率和可持续性。

总之,无人机和无人车自组网协同技术的应用前景非常广泛,可以在多个领域实现协同工作,提高任务的效率和准确性,为未来的智能化、自动化社会提供重要的技术支持。