目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
5.算法完整程序工程
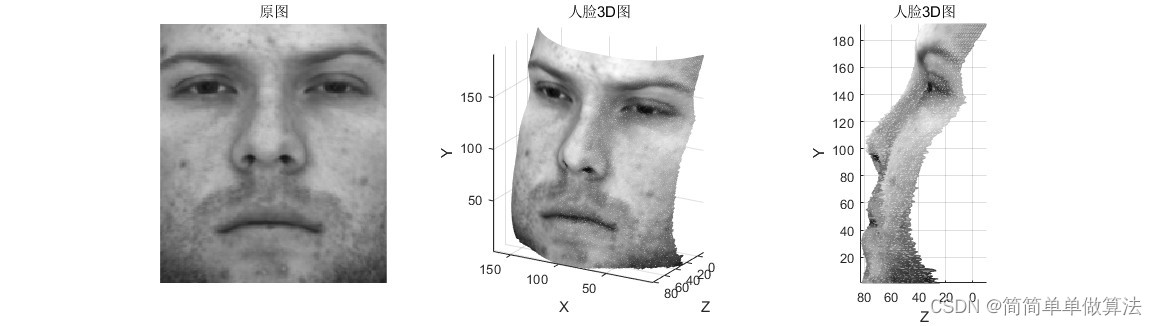
1.算法运行效果图预览


2.算法运行软件版本
matlab2022a
3.部分核心程序
............................................................................for j = 1 : Nimagesm = findstr(filenames{j},'A')+1;tmps(1,j) = str2num(filenames{j}(m:(m+3)));% 提取第一列角度值m = findstr(filenames{j},'E')+1;tmps(2,j) = str2num(filenames{j}(m:(m+2)));% 提取第二列角度值Image_set(:,:,j) = func_read([Pathname filenames{j}]);% 加载光照图像end% 将极坐标转换为笛卡尔坐标系表示光源方向[X,Y,Z]= sph2cart(pi*tmps(1,:)/180,pi*tmps(2,:)/180,1);% 注意这里的XYZ顺序,具体应根据实际情况调整light_dirs = [Y;Z;X];% 转置为列向量light_dirs = light_dirs';% 获取图像尺寸image_size = size(II0);%数据预处理:Image_set = bsxfun(@minus, Image_set, II0);Image_set = bsxfun(@max, Image_set, zeros(image_size(1),image_size(2)));Image_set = bsxfun(@rdivide, Image_set, 255);% 计算反射率和表面法线[II0, II3d] = func_stereo(Image_set, light_dirs);% 重构高度图depths = func_3Dsurface(II3d, image_size);% 显示反射率图像和表面func_shows3D(II0, depths);
1294.算法理论概述
二维人脸图像获取表面法线
首先,我们需要从二维灰度或者彩色人脸图像中估计表面法线。通常这一过程包括以下几个步骤:
-
人脸检测与对齐:确保人脸图像被准确检测并进行标准化对齐,以便后续处理。
-
深度信息估计:可以通过一些深度估计算法(如Shape from Shading,Photometric Stereo等)从单幅或多幅图像中估计像素点的深度值。深度图D(x, y)提供了每个像素点在三维空间中的深度信息。
-
表面法线计算:给定深度图,表面法线N(x, y)可通过梯度计算得出,对于像素坐标(x, y),其表面法线可表示为:

三维人脸模型构建
-
初步三维形状生成:根据预先训练好的三维人脸模型库以及二维人脸关键点信息,可以初始化一个粗略的三维人脸模型V(x, y, z)。
-
迭代优化:结合表面法线信息,通过优化算法(如迭代最近点算法ICP或非线性优化方法)逐步调整三维模型的形状和姿态,使其投影到二维图像上的表面法线尽可能接近实际估计出的表面法线。
-
全局优化:在约束条件下(如刚体变换、人脸拓扑结构等)优化三维模型参数,使得模型与图像数据的最佳拟合程度最大化。
总结来说,基于表面法线的二维人脸图像构建三维人脸模型的核心在于通过图像分析获取表面法线信息,并利用这些信息作为约束条件进行三维模型的优化求解。但需要注意的是,这种方法通常需要多视角或多幅图像的数据支持,单幅图像重建存在很大困难且易受光照、表情等因素影响。在实际应用中,往往结合其他线索(如人脸关键点、形状先验等)共同构建高质量的三维人脸模型。
5.算法完整程序工程
OOOOO
OOO
O