文章目录
- 前言
- 一、频率调制原理
- 二、Frequency Mod 模块
- 三、底层 C++ 代码实现
前言
频率调制(Frequency Modulation, FM)是一种重要的调制技术,广泛应用于无线广播和通信,本文对 GNU Radio 中的 Frequency Mod 模块进行深入剖析。
一、频率调制原理
频率调制的基本概念是:载波的频率会随着输入信号的幅度变化而变化。具体来说,输入信号的幅度直接影响了载波的瞬时频率。在 FM 中,信息(如音频信号)被用来调整载波信号的频率。
在数学上,如果有一个基带信号 x ( t ) x(t) x(t),它通过频率调制后的信号 y ( t ) y(t) y(t) 可以表示为:
y ( t ) = A c o s ( 2 π f c t + 2 π k f ∫ x ( τ ) d τ ) y(t)=Acos(2\pi f_ct+2\pi k_f \int x(\tau)d\tau) y(t)=Acos(2πfct+2πkf∫x(τ)dτ) 这里, A A A 是载波的振幅, f c f_c fc 是载波的初始频率, k f k_f kf 是频率偏差常数,它表示输入信号能够引起的最大频率偏差。
二、Frequency Mod 模块
这个模块是一个输入幅度控制的复数正弦波。它输出一个信号,该信号的瞬时相位增加与灵敏度和输入幅度成正比。更具体地说,它接收一个实数基带信号( x m [ n ] x_m[n] xm[n]),并根据下列公式输出一个频率调制的信号( y [ n ] y[n] y[n]):
y [ n ] = e x p ( j 2 π f Δ f s ) ∑ x [ n ] y[n]=exp(j2\pi\frac{f_{\Delta}}{f_s})\sum x[n] y[n]=exp(j2πfsfΔ)∑x[n]其中 x [ n ] x[n] x[n] 是时间 n n n 的输入样本, f Δ f_{\Delta} fΔ 是频率偏差, f Δ f_{\Delta} fΔ 的常见值包括对于语音系统的窄带 FM 频道为 5 KHz,以及像音频广播 FM 电台的宽带 FM 为 75KHz。
在这个模块中,输入参数是灵敏度而不是频率偏差,灵敏度指定了基于新输入样本的相位变化量,给定一个最大偏差 f Δ f_{\Delta} fΔ 和采样率 f s f_s fs,灵敏度被定义为:
k = 2 π f Δ f s k=2\pi \frac{f_{\Delta}}{f_s} k=2πfsfΔ
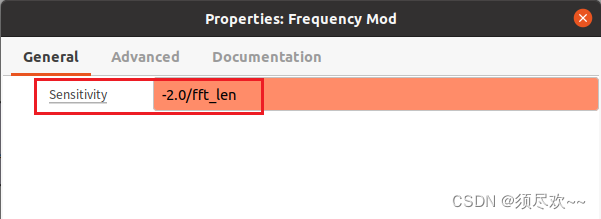
输入参数:灵敏度 = (2 * π \pi π * 偏差) / 采样率。其中,“偏差”是当输入值为 -1 或 +1 时频率的变化量。如果输入值超出 [-1, +1] 范围,偏差可能会更大。
设置灵敏度为 -2.0 / fft_len 是因为:
频率偏移与FFT长度的关系:在 OFDM 系统中,FFT 长度决定了子载波的间隔。灵敏度设置与 FFT 长度的倒数意味着对于 FFT 中的每个点,频率偏移应该相应地调整以校正整个频谱。所以这里的设置是一个针对特定 FFT 长度校正频率偏移的实际数值。负号的意义:这里使用负值通常是为了调整相位增加的方向,即使得相位随着输入信号的增加而逆时针旋转。-2.0/fft_len:-2.0 的因子表明在 FFT 长度的一半上会进行一个完整的旋转;它反映了与奈奎斯特频率(数字信号处理中的采样频率的一半)相关的半周期校正。一个完整周期将是 2π 弧度的旋转,因此半周期将涉及 π 弧度的旋转,这就是规范化 fft_len 时出现 -2.0 因子的原因。- 幅度 2.0 与全周期校正有关(因为 2π 弧度对应一个完整周期),通过FFT长度缩放,正确地分布在每个子载波的相位调整上。-2.0 因子确保旋转不会超过每个子载波的半周期,这对于避免过度旋转和过度校正是必要的。
三、底层 C++ 代码实现
frequency_modulator_fc::sptr frequency_modulator_fc::make(float sensitivity)
{return gnuradio::get_initial_sptr(new frequency_modulator_fc_impl(sensitivity));
}frequency_modulator_fc_impl::frequency_modulator_fc_impl(float sensitivity): sync_block("frequency_modulator_fc",io_signature::make(1, 1, sizeof(float)),io_signature::make(1, 1, sizeof(gr_complex))),d_sensitivity(sensitivity),d_phase(0)
{
}frequency_modulator_fc_impl::~frequency_modulator_fc_impl() {}int frequency_modulator_fc_impl::work(int noutput_items,gr_vector_const_void_star& input_items,gr_vector_void_star& output_items)
{const float* in = (const float*)input_items[0];gr_complex* out = (gr_complex*)output_items[0];for (int i = 0; i < noutput_items; i++) {d_phase = d_phase + d_sensitivity * in[i]; // 计算新的相位// place phase in [-pi, +pi[
#define F_PI ((float)(GR_M_PI))d_phase = std::fmod(d_phase + F_PI, 2.0f * F_PI) - F_PI; // 相位归一化float oi, oq;// 生成复数输出信号int32_t angle = gr::fxpt::float_to_fixed(d_phase);gr::fxpt::sincos(angle, &oq, &oi);out[i] = gr_complex(oi, oq);}return noutput_items;
}
源码中的循环处理每个输入样本,并产生一个输出样本。整个处理流程分为如下几个关键步骤:
- 1、相位更新:
d_phase = d_phase + d_sensitivity * in[i];- 这一行代码是计算新的相位。d_phase 为当前相位,d_sensitivity 是频率灵敏度(即频率偏移与输入信号振幅的比例因子),in[i] 是当前的输入样本。这样,输入样本值(即调制信号)直接影响了振荡器的相位,实现了频率的调整。
- 2、相位归一化:
d_phase = std::fmod(d_phase + F_PI, 2.0f * F_PI) - F_PI;- 为了保持相位在 [-π, π) 的范围内,使用了模运算(std::fmod)。首先通过加 π 将相位调整到 [0, 2π) 范围,然后通过模 2π 得到归一化后的相位,最后减 π 回到 [-π, π) 范围。
- 3、生成复数输出信号:
int32_t angle = gr::fxpt::float_to_fixed(d_phase);
gr::fxpt::sincos(angle, &oq, &oi);
out[i] = gr_complex(oi, oq);- 这段代码首先将浮点数相位转换为固定点数表示(适合于快速的正弦余弦计算),然后使用固定点数相位计算正弦和余弦值(分别代表复数的实部和虚部),最后生成复数输出。
我的qq:2442391036,欢迎交流!

![[移动端] “viewport“ content=“width=device-width, initial-scale=1.0“ 什么意思](https://img-blog.csdnimg.cn/direct/0a3e56de0b4e4865b8398603fcf5c02c.png)