实物展示
IWR1843雷达板如下图所示, 支架四个,三对螺丝螺帽(实际上只需两对,留一对冗余);USB数据线;缺少5V电源线(手动焊接😒)。

文章目录
- 实物展示
- 需要下载的软件
- 一、例程下载
- 在这里插入图片描述
- 二、模式介绍
- 在用Uniflash烧写BIN文件之前,简单介绍一下毫米波雷达板的两种模式
- 三、Uniflash烧写
- 1.保证雷达板已通电并且连接正常
- 2.SOP处于闪烁状态
- 3.打开Uniflash软件
- 三、显示界面
- 总结
需要下载的软件
(1)Code Composer Studio 11.2.0(TI编译平台);
(2)mmWave SDK链接
(3)mmWave DemoVisualizer
(4)UniFlash 6.4.0
一、例程下载
1.在TI的官网会有相关的演示例程,链接在这
2.当然也可以在Code Composer Studio 11.2.0上进行下载(这里简称ccs),例程和链接一致。
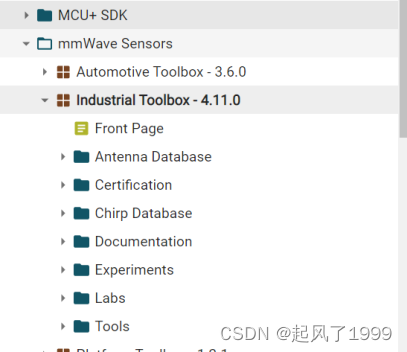
进入ccs,点击View->Resource Explorer->mmWave Sensors->industrial Toolbox->labs,选择相应的例程。这里选择开箱演示例程
Out of Box Demo。

二、模式介绍
在用Uniflash烧写BIN文件之前,简单介绍一下毫米波雷达板的两种模式
(1)闪烁模式
该模式要让SOP处于101状态,在烧写之前保证SOP引脚保持SOP0和SOP2为ON,SOP1为OFF,即101;
该状态用于Uniflash 软件对 BIN文件的烧写。
(2)功能状态
SOP设置为001,即在闪烁模式的基础上使得SOP2置于关闭状态
该状态用于上位机的命令配置以及图像数据显示。

三、Uniflash烧写
1.保证雷达板已通电并且连接正常
2.SOP处于闪烁状态
3.打开Uniflash软件
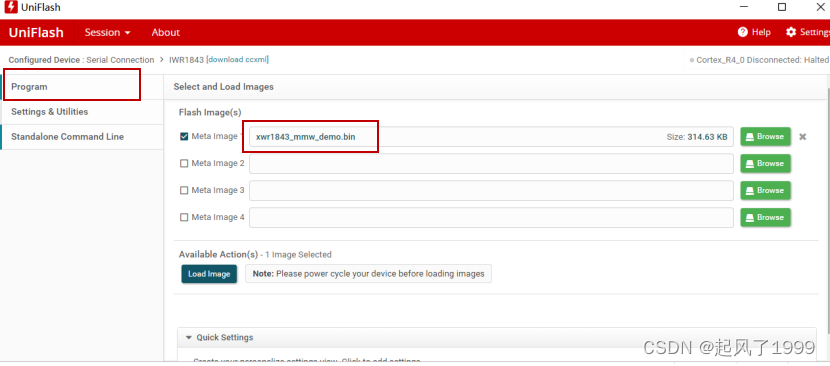
(1)选择合适的开发板型号IWR1843,点击开始;
(2)在Program处的Image加载bin文件;
文件路径:
mmwave_industrial_toolbox_4_11_0/labs/Out_Of_Box_Demo/prebuilt_binaries/xwr1843_mmw_demo.bin
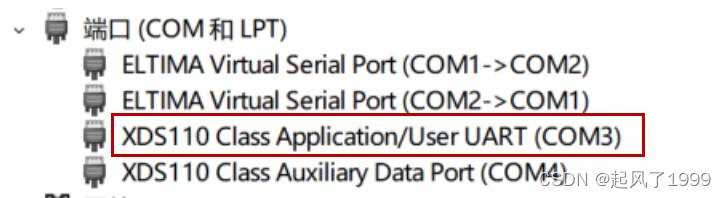
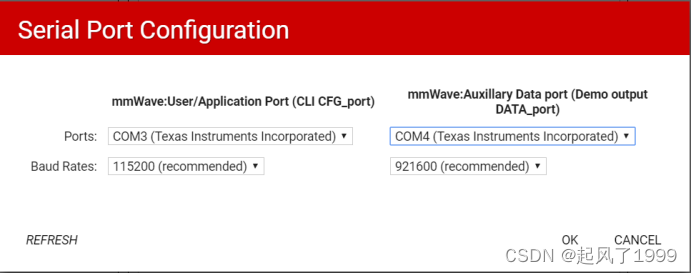
(3)在settings &Utilities选择合适的端口,端口号可以再设备管理器查看
其中COM3用于配置命令端口,COM4用于数据传送端口

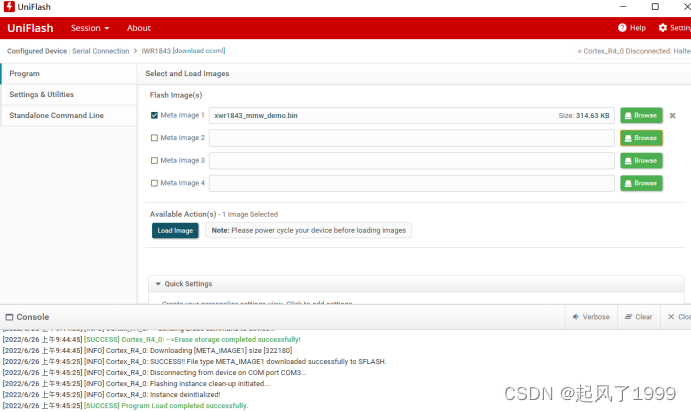
(4)点击Load Image开始烧写,显示烧写成功.
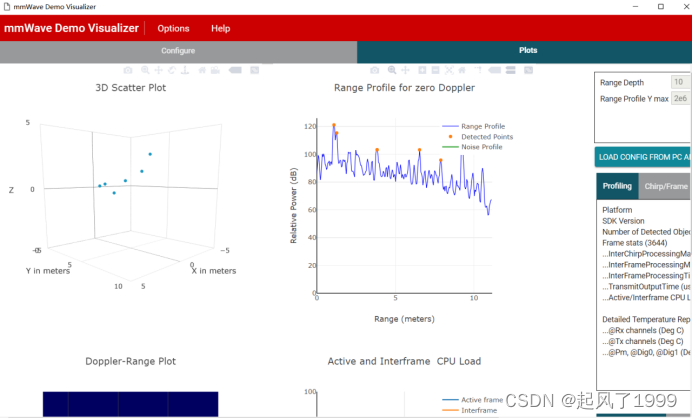
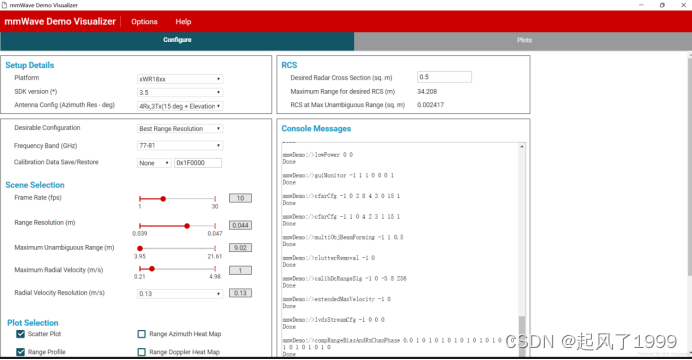
三、显示界面
1.在显示图像之前,将SOP2置为OFF,即001。
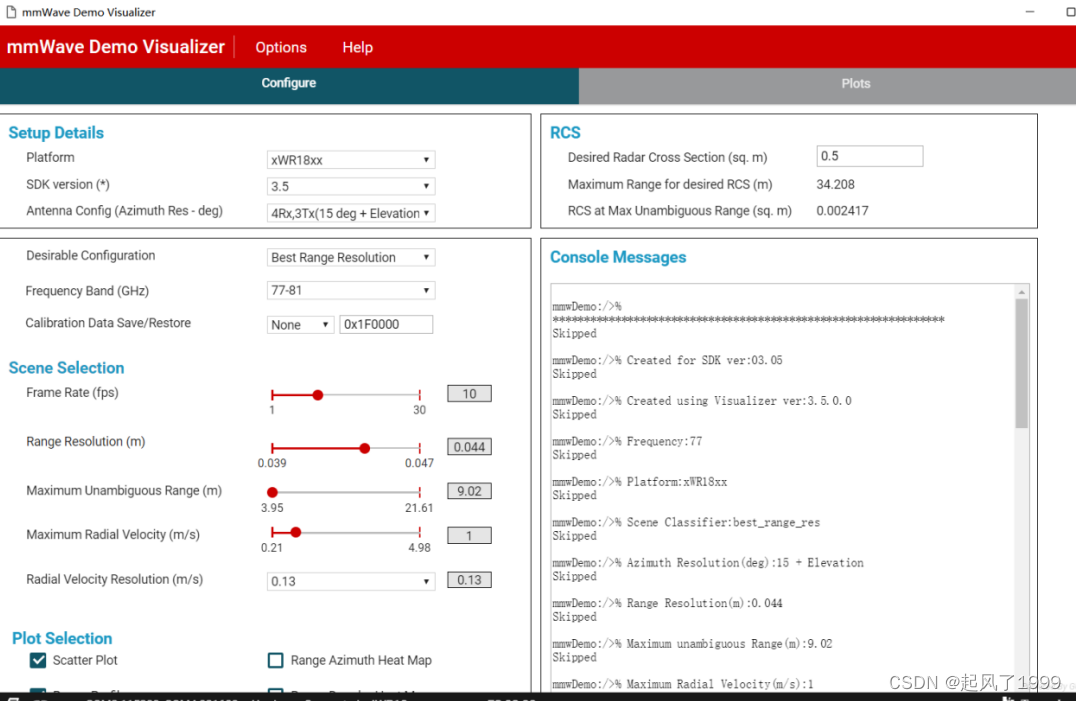
2.打开下载好的mmWave DemoVisualizer,主要完成以下配置,Platfrom:xWR18xx,
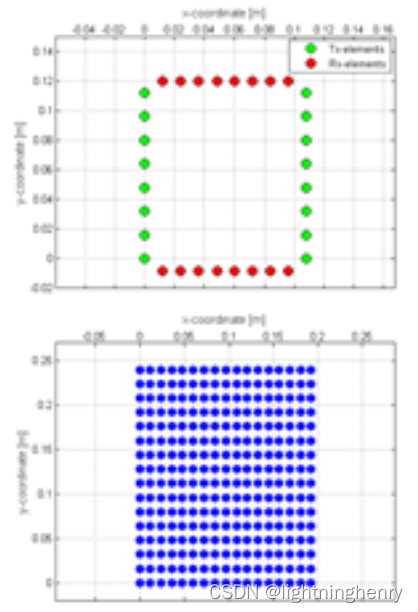
Antenna Config:4Rx,3Tx
由于雷达板IWR1843是三发送四接收,所以这里选用Antenna Config:4Rx,3Tx,其他的平台根据实际情况另行分析,比如IWR1642是双发送四接收。
3.点击option 选择相应端口
4.点击SEND CONFIG TO MMWAVE DEVICE,等待运行结果

5.在右边的Plot界面显示有关图像