摘要:
在过去几年中,视网膜眼底图像的使用已增加用于诊断视网膜疾病。 青光眼是一种导致眼睛视神经受损的疾病,导致视力下降。 一旦确诊,该病不能完全治疗,但及时检测可进一步控制青光眼的效果。 通常通过分析视神经盘然后在眼睛中的神经节细胞出口处存在视杯来进行检测。 使用视网膜眼底图像和图像处理方法,迄今为止已经发表了各种研究,但是视盘和视杯的准确分割问题仍然是一个主要问题。 本文旨在分析不同研究人员使用的各种分割方法,其中采用视盘视杯及其分类诊断青光眼。 此外,本文还讨论了为提高细分和分类准确性而需要处理的各种研究差距和挑战。
1.简介:
1.1青光眼
青光眼的早期诊断和治疗对于防止不可逆的视力丧失至关重要。传统的诊断方法包括手动提取,耗时且易于出现人为错误的特征。因此,需要改进的和自动化的机器学习方法,用于在更短的时间跨度内精确地诊断疾病。青光眼是一种眼病,其中眼睛视神经的损伤导致不可逆和渐进的视力丧失。视神经携带从视网膜到大脑的视觉信息,这使人类能够可视化外部世界。被称为眼内压的眼压升高是青光眼的主要原因。当眼睛中产生的流体量增加时,眼睛中的压力增加,结果导致眼睛的引流或流出通道发生阻塞。通过识别视神经损伤来检测青光眼,该损伤始于视力恶化并最终导致失明。在许多情况下,由于流体不能通过眼睛排出而导致眼睛的引流被堵塞,因此由于流体的压力积聚导致眼睛的视神经受到影响而导致视力下降。最初,青光眼会影响双眼,但是在一只眼睛受伤或使用类固醇的情况下,疾病对一只眼睛的进展比其他眼睛更快[1]。青光眼主要分为开角和闭角。开角型青光眼是青光眼的普遍类型之一,随着年龄的增长而增加。眼睛压力的上升是由于排水堵塞而打开了排水角度。大多数时候,压力的增加没有任何疼痛和症状。视力丧失从眼睛的一侧开始并朝向眼睛中心。然而,闭角型青光眼是一种青光眼,其中所有的引流角都被关闭,因为流体不能到达眼睛的其他部位。在角闭合性青光眼的情况下,眼睛的压力突然增加,导致关闭和阻塞引流角,从而扩大或加宽瞳孔。青光眼可能以眼痛,恶心,头痛,视力模糊和红眼为特征。手术用于通过在激光的帮助下在虹膜中形成孔来恢复青光眼,以维持正常的液体流动[1]。
一般来说,青光眼患者最初没有症状,但随着时间的推移,专家可以检测到症状。眼睛压力变化的人在早晨时通常在光的存在下可能具有视力模糊和晕圈的出现。青光眼通常被称为盗窃视力,因为它会增加眼睛的压力,没有任何症状,并可能导致失明。预防疾病取决于青光眼的类型,由专家检测,因此对患者给予适当的治疗[1]。因此,准确和及时地检测青光眼可以在一定程度上不完全限制其进展。
根据世界卫生组织(WHO)的统计数据,青光眼是继白内障后不可逆失明的第二大流行原因。青光眼已经影响了美国近300万人,其中150万人没有意识到这种疾病。虽然青光眼一旦发生就不能完全治愈,但可以通过药物或手术来阻止其进展,以保护眼睛免受视力丧失。由于每个年龄组都有青光眼的风险,保护眼睛免受青光眼的最佳方法是在观察到任何视力相关问题时立即咨询眼科医生[2]。使用视网膜成像诊断青光眼是通过计算杯子来实现的。通过提取视盘和视杯以计算其垂直高度的比率来实现杯盘比(CDR),Inferior Superior Nasal Temporal(ISNT) rule,视盘损伤可能性量表(DDLS)和青光眼风险指数(GRI)。视神经盘是视神经的起始点,视神经是视网膜细胞神经彼此靠近的位置。它是将血液传递到视网膜的血管的进入点。另一方面,视杯是视盘上存在的可变尺寸的中央凹陷。苍白的圆盘表示疾病的颜色从橙色到粉红色不等。有关视网膜图像及其特征的详细信息,请参见第1.2节:


1.2 眼底图
视网膜眼底图像是使用特殊视网膜眼底照相机拍摄的用于诊断各种眼病的特殊类型的眼睛图像。 临床专家拍摄视网膜图像以检查视网膜中存在的各种异常。 视网膜眼底图像具有用于诊断视网膜病,青光眼等不同疾病的各种特征。视网膜图像的特征因人而异,但具有特定的功能。 视网膜眼底图像的一些特征显示在图4和图5中。 第1节和第2节,第1.2节讨论:
1.2.1 视盘
视盘是视网膜的中央黄色部分,是进入视网膜的输出血管的入口点。 它的形状或多或少是圆形的,因人而异。 视盘也称为盲点,因为它不包含颜色获取光感受器的视杆和视锥。 它由大量神经元组成。 典型的视盘外观呈橙色至粉红色,但苍白的视盘是一种有疾病的视盘[3]。
1.2.2 视杯
视杯是视盘上存在的可变尺寸的明亮中央凹陷。 它是用于诊断青光眼的重要参数。 视杯的前进通过阻挡视盘导致青光眼的发生。 与视盘相比,视杯的尺寸更小,并且是正常患者视盘尺寸的三分之一[3]。
1.2.3 视网膜血管
视网膜血管通常被称为彼此靠近的动脉和静脉。 关于血管的信息有助于诊断各种疾病,例如糖尿病性视网膜病变,并且还被认为是操作眼睛的标志。 血管携带血液进出眼睛的各个部位[3]。
1.2.4 中央凹
中央凹(中央凹,是视网膜中视觉最敏锐的区域。以人为例,在视神经盘颞侧约3.5mm处,有一黄色小区,称黄斑,其中央的凹陷,就是中央凹。)是一个略微凹陷的小区域,视网膜中央没有任何血管,直径约为1.5毫米。 中央凹是视网膜最暗的区域,细胞为人眼提供中心视力。 黄色中央凹的颜色由视网膜中的深红色或红褐色表示[3]。
1.2.5 黄斑
黄斑是一种黑色色素区域,存在于视网膜中央。 它外观为黄色,直径约为5.5毫米,据信可吸收紫外线和过量的蓝色。 此外,黄斑作为防晒霜,细分为中央凹和下腹部,专门用于不同类型的视觉,如侧面,中央等。
1.2.6 渗出物
渗出物是通常用于检测视网膜病变的视网膜图像的另一个特征。 它是一个明亮的散在的斑块,像静脉和动脉渗漏后形成的视网膜部分。 图2显示了带有渗出物的眼睛的视网膜图像[4]。
本文的其余部分进一步组织成第2节,简要描述了青光眼的诊断参数。 第3节列出了用于分析的公开数据集的详细信息。 第4节介绍了用于分割视盘和视杯的现有技术方法。 第5节讨论了分类,第6节讨论了文献中确定的研究差距和发现,这些研究支持了青光眼领域的进一步研究,第7节总结了论文。
2. 青光眼的诊断参数
图3显示了需要识别以诊断青光眼的各种参数,详细信息见第2.1至2.4节。
2.1 杯盘比
CDR是杯与盘水平长度,垂直长度和面积的比率。 如果该比率为0.3或更小,则将眼睛视为正常眼睛。 但如果比例超过0.3,眼睛就是异常的威胁。式(1) - (3)定义用于诊断青光眼的各种杯盘比率的计算。
这里,HCDR是水平杯盘比,VCDR是垂直杯盘比,ACDR是区域杯盘比。 H c u p H_{cup} Hcup是视杯的水平长度, H d i s c H_{disc} Hdisc是视盘的水平长度, V c u p V_{cup} Vcup是视杯的垂直长度, V d i s c V_{disc} Vdisc是视盘的垂直长度, A c u p A_{cup} Acup是视杯区域。 A d i s c A_{disc} Adisc是视盘区域。
2.2 ISNT法则
ISNT规则是下,上,鼻和颞区域的边缘区域的排序,如式(4)中给出的。 遵循此行为的眼睛被认为是正常的,而其他人则认为是异常的。

2.3 DDLS(视盘损坏可能性范围)
DDLS是计算视盘损伤可能性的量表,即疾病的严重程度,并且如式(5)中给出的那样计算。
这里,DDLS是视盘损坏可能性,MinRIM宽度是边缘的最小宽度,DD是视盘直径。
表1显示了用于检查疾病严重程度的计算比率的比例值。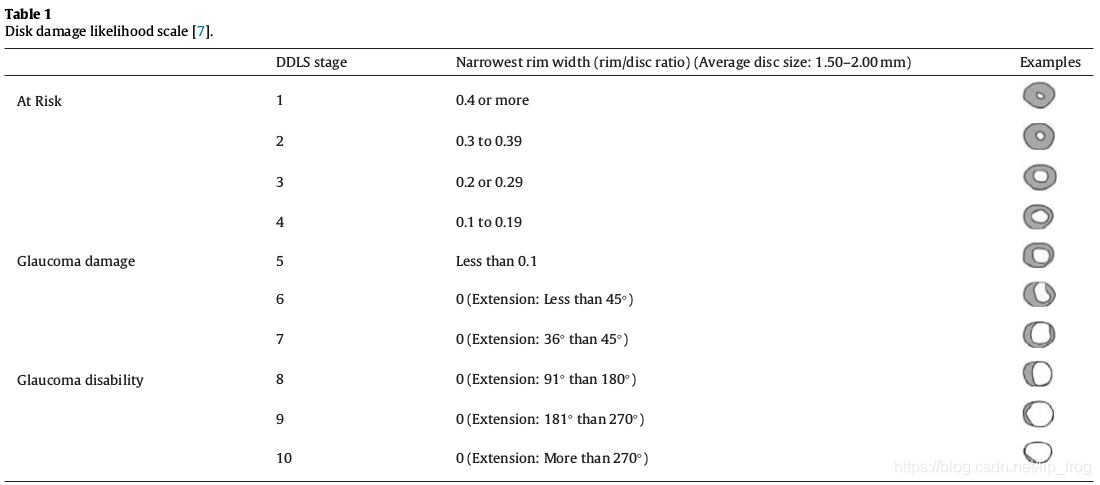
2.4 GRI
GRI是各种主要组成部分的组合,其计算方法如公式(6)所示:

在这里,GRI是青光眼风险指数,PC1到PC5是使用主成分分析(PCA)计算的主要成分。 如果GRI的范围是(8.68±1.67),则认为眼睛是正常的,如果范围是(4.84±2.08),则认为眼睛是异常的。
4. 文献调查
视杯和视盘最初从视网膜图像分割,通过计算诊断参数分类为正常或异常。然后使用不同的分割和分类方法从输入的视网膜眼底图像中提取所需的感兴趣区域.Allam等人。提出了对不同数据集上的视盘分割的现有技术方法的比较。这些方法分为船舶收敛,基于财产和基于模板。根据分析,与其他数据集相比,DRIVE数据集显示出更好的性能,可用于评估结果。此外,对比度限制自适应直方图均衡(CHALE)和自适应直方图均衡(AHE)等预处理提高了输入图像的对比度,以便进一步分析。进一步分析表明,基于属性的方法不如其他两种方法准确, [11]。虽然这种方法不考虑视杯的分割,但这是诊断青光眼的一个重要特征。因此,Almazroa等人。比较了视杯与视盘的分割方法,以检测青光眼。本文还讨论了由于图像对比度低,血管存在,周围毛细血管萎缩,玻璃疣等,研究人员面临的准确分割视盘和视杯的挑战。其他一些异常[12]。同样,Thakur等人。还比较了一些现有的视盘和视杯分割方法[13]。但到目前为止这些论文并不是最新的,因此不讨论现有的技术方法。随着青光眼的进展日益快速增长,预计到2020年它将成为失明的最常见原因。目前正在进行大量研究,最近该领域的工作备受关注。但是可以分析现有技术水平以在相关领域中进行越来越多的即兴创作。因此,Thakur等人提出了一些现有的视杯分割方法的比较。从调查中可以看出,由于视盘和视杯的不可见边界,视杯分割面临了大尺寸或小尺寸视杯的分割和过度分割的挑战。但该论文仅考虑了视杯的分割方法,仅仅不足以诊断疾病的青光眼。此外,在视杯的分割方面做的工作较少。因此,对于青光眼的诊断需要改进的视杯分割方法[14]。由于所提出的研究比较了现有的现有技术方法,本文提出的新颖性是它讨论了迄今为止用于分割视盘和视杯以及其分类用于诊断青光眼的所有近期方法。 此外,将分割方法分类为水平集方法,阈值处理,主动轮廓建模,主动形状建模,基于聚类的方法,基于组件的方法和混合方法与讨论的论文不同。
用于将分割分类为所提及的方法的标准是它们的工作原理。 使用曲线和曲面概念的方法被分类为水平集方法。 而具有低于和高于阈值的强度像素的其他方法被分类为基于阈值的方法。 强调要提取的区域的边界和形状的信息被分类为活动轮廓和活动形状。 而在定义范围内具有相似像素分组的其他人被分类为基于聚类的方法。然而,基于诸如颜色和强度分量之类的特征从图像中提取期望区域的人被分类为基于组件的方法。 结合多种方法的方法被归类为基于混合的方法。一些研究比较了视盘和视杯的分割方法,见4.1节:
4.1 视盘与视杯分割
4.1.1 水平集方法
Osher和Sethian在1988年提出了水平集分割方法,用于跟踪移动物体的界面。通过演化轮廓隐含地处理曲线和曲面的问题。使用零对应于原始曲线的函数的概念[15]。
在二维中,水平集表示具有辅助函数 Ψ \Psi Ψ的闭合曲线 Γ \Gamma Γ,其被称为水平集。 Γ \Gamma Γ被认为是给定的 Ψ \Psi Ψ的零水平
使用水平集方法隐式地操纵 Γ \Gamma Γ,使用函数 Ψ \Psi Ψ,假设内部为正值,使用 Γ \Gamma Γ定界的曲线区域外的负值。 类似地,对于以速度 ν \nu ν移动的曲线,水平集函数M满足等式

刘等人提出基于水平集的视盘和视杯分割方法诊断青光眼。最初使用裁剪以最高对比度提取感兴趣区域,并且应用变分水平集方法来分割视盘而无需重新初始化。为了使轮廓平滑,引入了将水平集保持在符号距离函数附近,然后进行椭圆拟合的能量函数。类似地,由于参与视网膜图像的血管,基于颜色强度的阈值方法被用于视杯分割,然后进行椭圆拟合以使边界平滑。然而,基于水平集的方法的阈值化被用于输入RGB图像的绿色通道中的视杯的分割,随后是用于边界平滑的椭圆拟合。相比之下,分析表明,与基于颜色强度的阈值方法的变分水平集方法相比,基于阈值的视杯分割的变分水平集方法改善了性能。但是,在CDR值越来越大的情况下,所提出的方法降低了性能[16]。
同样,Wong等人 通过以中心和半径为基准的最高强度直方图像素提取感兴趣区域来定位视盘。 通过将感兴趣区域视为初始轮廓,使用变分水平集方法进行分割。 由于检测到血管的存在,视盘边界不准确,因此使用椭圆拟合来校正边界。 通过直方图分析,利用基于阈值的水平集方法,从归一化的交换强度,然后椭圆拟合进行平滑,将RGB图像的绿色通道用于视杯的分割。 在比较结果时,分析了所提出的方法优于现有方法的正常和异常情况[17]。
此后,张等人使用基于多模态的融合方法检测用于青光眼诊断的视杯。通过应用掩模来去除不均匀照明来检测感兴趣区域,并且使用任何现有方法进行分割。对于视杯的分割,基于强度的方法用于分析组合通道中的颜色直方图和视杯的阈值。然后应用变分水平集方法来检测杯边界,使用基于最佳颜色通道的直方图分析和使用直接最小二乘拟合算法的椭圆拟合来平滑杯边界。最后,使用基于凸包的椭圆优化来进一步平滑杯边界。在绩效分析中,基于水平集的方法优于基于强度的方法。提出的方法改进了CDR评估,从而更好地诊断了青光眼,但缺乏对大规模临床数据库的检测[19]。此外,Zhang等人。提出了一种改进的光杯检测方法,采用基于凸壳的椭圆优化方法。使用更稳健的基于阈值的水平集方法对光学杯进行分割,然后基于直接最小二乘拟合算法进行椭圆拟合。然后使用凸壳来优化视杯的椭圆拟合边界,以杯形盘比(CDR)进行青光眼诊断。比较所提出的方法与ARGALI现有技术的性能优于ARGALI,改进的RMS误差为0.1008,偏差为0.0614。但该方法缺乏对临床应用的大规模评估[20]。
4.1.2 基于阈值的方法
阈值处理是用于从灰度或彩色图像创建二进制图像的最简单的分割方法。 该方法的工作原理是选择用于分配低于和高于阈值的颜色的阈值,以获得分割的图像。 像素根据像素的强度值进行分区[21]。 具有适当阈值T的全局阈值给出为
在可变阈值处理的情况下,T可以根据(x,y)的邻域在图像上改变。 但是具有适当阈值T1和T2的多阈值给出为

托马斯等人 通过应用形态学技术进行阈值处理,提出了一种视盘分割方法。 输入图像基于面积进行阈值处理以获得包含视盘最亮区域的二进制图像。 最初通过应用六边形结构元素,通过闭合和打开操作对输入的视网膜图像进行过滤和重建。 最后,使用基于梯度的经典流域变换来获得视盘的轮廓。 但由于图像对比度低,该方法无法处理问题[22]。
因此,Pallawala等人应用基于小波的处理以及椭圆拟合来提取视盘。最初进行Daubechies小波变换以获得小波特征,然后进行HH分量的逆变换和阈值处理。然后从原始图像中减去所得图像以得到减影图像及其子图像。然后通过拍摄具有最大平均强度的子图像来确定视盘中心以计算窗口“W”。光盘以模板的形式表示,具有两个同心圆,并使用它们的强度比来近似。最后,利用基于椭圆拟合的Sobel边缘图获得了视盘轮廓。但是为了进一步提高基于逆Daubechies小波的增强精度,通过对HH分量进行滤波以进一步分析来提高变换精度。但是,仍然需要通过使这些方法在大规模临床试验中更少时间复杂和稳健来进行改进[23]。
4.1.5 聚类方法
聚类是以这样的方式对聚类进行分组的迭代方法:具有相似行为的对象位于一个组上,而其他组的其余组基于相似性。 它基于距离函数,密度函数,要形成的多个聚类和阈值的值。
用于聚类的目标函数的最小化给出为

4.2 异常分类
5 性能指标
本节描述了由不同的研究人员评估的参数,用于估计所提出方法的性能。 用于分析所讨论方法的性能的一些度量在方程式(22)-(34)中给出。
5.1 CDR可接受性
CDR可接受性是计算的CDR和临床CDR之间差异的量度。 如果两个CDR之间的偏差小于0.2个单位,则认为是可接受的。 CDR可接受性计算为

5.2 平均误差Mean error
Mean error is the measure of closeness between actual and observed outcomes. It is given as
在这里,me是平均误差,n是观测数, f i f_i fi是实际的结果和 o i o_i oi是观察到的结果。me越大表现越差。
5.3 标准偏差Standard deviation
标准偏差是表示一组对象与给出的平均值之间的差异的度量
这里,sd是标准偏差,x是观测值,x’是算术平均值,n是观测值的总数。sd越大表现越差。
5.4 Rms error
Rms误差是计算两个变量之间差异的度量,给出为
这里, r m s e r r rms_{err} rmserr是均方根(Rms)误差, y i y_i yi是观测值, y i y_i yi'是预测值,n是观测总数。 r m s e r r rms_{err} rmserr值越小表现越好。
5.5 相对绝对面积差异Relative absolute area difference
相对面积差异是两个场之间相对变化的量度,即分割区域和标准答案的差异,如下所示

这里rad是相对面积差, V D s e g VD_{seg} VDseg是分段盘的垂直直径, V D r e f VD_{ref} VDref是参考标准答案的垂直直径。rad值越低性能越好。
5.6 骰子指标Dice metric
[骰子指标是两个场之间相对变化的量度,即分割区域和标准答案的差异,如下所示

这里dm是骰子指标,A是分割区域,B是标准答案。dm越大性能越好。
5.7 F-score
F分数是精度的度量,其值在0-1范围内,并给出为
这里 F s c o r e F_{score} Fscore是F分数, A r e a s e g Area_{seg} Areaseg是分割区域, A r e a g t Area_{gt} Areagt是标准答案。F-score越靠近1性能越好。
5.8 Sensitivity
敏感性是正确识别疾病状况的能力,并给出为
Here, Se is sensitivity, TP is true positive and FN is False negative.
True positive is the region of image segmented as disc/cup and is
proved to be of disc/cup. Whereas, FN is the region of an image
segmented not as disc/cup but is proved to be of disc/cup. More is
the value of Se better is the performance.
5.9 Specificity
特异性是正确识别非患病状况的能力,并给出为

Here Sp is specificity, TN is true negative, and FP is false positive.
True negative is the region of the image not segmented as disc/cup
and proved to be not of disc/cup. Whereas, FP is the region of an
image segmented as disc/cup but is proved to be not of disc/cup.
More is the value of Sp better is the performance.
5.10 Accuracy
准确度是计算结果与基本事实(标准)匹配的程度,并给出为
Ac值越大效果越好。
5.11 Overlap area ratio
重叠面积比是衡量分割区域与实际标准答案区域匹配程度的指标如
m1越大性能越好。
5.12 Non-overlap area ratio
非重叠面积比是衡量分割区域和实际标准答案区域之间的不相似度量的度量
m2越大性能越不好。
5.13 Correlation coefficient
相关系数是两个变量之间线性关系的强度和方向的度量,其值在0-1的范围内,并计算为
n是观察总数,x,y都是变量。r越靠近1性能越好。
6 结果与讨论
从文献调查中,已经确定了以下研究差距和研究结果,这有助于进一步研究视盘和视杯分割领域,然后对青光眼进行分类。
6.1 研究不足
1.研究人员不时地考虑了特征的数量以进行分类,但仍然有一些特征可以被考虑用于改进分类器的性能。
2.由于低对比度和圆盘与杯子之间的不可见边界,在大的和小尺寸的视盘和视杯的分割或过度分割被认为是挑战。
3.分类的准确性随着图像数量的增加而降低。 因此,需要改进分类方法来精确地分类正常和异常情况。
4.视网膜血管和周围萎缩的存在降低了分割的性能。 因此,需要改进预处理方法来移除血管并避免作为视盘区域的周围区域。
5.对视杯的分割工作较少。 因此,需要改进的视杯分割方法来诊断青光眼。
6.由于复杂性增加和精度降低,所有诊断参数未同时考虑在内。
7.由于复杂性增加,有限的方法已用于融合视盘和视杯的分割。
8.现有的分割和分类方法缺乏对大规模数据集进行临床评估的测试。
6.2 发现
1.红色通道更适合于视盘分割,因为与其他通道相比,该通道中的视盘具有清晰的外观。
2.与其他通道相比,由于该通道的高对比度,绿色通道更适合于视杯的分割。
3.形态学方法和各种滤波器用于预处理视网膜图像以去除图像中存在的血管,这可能进一步造成分割困难。而且,从讨论中可以分析每种方法都有自己的方法。 表4中给出的优点和缺点取决于某些因素。此外,可以分析这种分类器对分类没有最佳分类。 每种技术都有其自身的优点和缺点,如表5所示,这取决于某些因素,如输入数量,输入质量和分类时间的可用性。 但是已经发现,在这种情况下,由于最大精度,SVM分类器是常用的。
除了第6.2节中给出的结果外,我们还评估了我们数据集中某些现有技术方法的性能,如图5和表6所示。基于主观分析,我们得出结论:Clustering聚类得到最大准确度,因此可以进一步扩展分割。与主观/定性分析相似,客观/定量分析表明基于Clustering聚类的方法优于其他现有技术方法,如表6所示。


7 结论
本文讨论了迄今为止用于青光眼诊断的各种分割和分类方法。它总结了分割和分类领域中的各种挑战,可以考虑使用改进的图像处理方法来解决问题。研究表明,仍然存在一些可以提高分类性能的特征。由于视网膜血管的承受和周围毛细血管萎缩导致分割的性能恶化,因此避免在具有大或小尺寸的视盘和视杯的分割或过度分割下存在挑战。为了克服所讨论的问题,通常在红色通道中实现视盘的分割,因为该通道在非视盘和视盘区域之间具有最高的差异。通常在处理之前识别感兴趣的区域,因为它减小了输入图像的尺寸,并使计算更快更准确。视盘分割中的挑战是由于利用诸如打开,关闭或直方图均衡之类的形态学操作的预处理图像克服的血管的存在。而且,由于视杯与血管和周围组织的交织,因此与视盘相比,视杯的分割被认为更加繁琐。由于该通道中视网膜血管的可见度较低,其分割通常在RGB颜色空间的绿色通道中进行。但是从现有的分割方法来看,基于聚类的分割的性能优于其他分割。此外,SVM分类器是常用的分类器,具有最高的准确性。因此,需要提出改进的分割和分类方法来诊断疾病性青光眼。




![android 格式工厂,格式工厂app下载-格式工厂app安卓版下载[辅助工具]-华军软件园...](https://img-blog.csdnimg.cn/img_convert/569ba2c572d55845fcf61e3d08e56099.png)