提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
目录
前言
1.实验现象
2.实验接线及原理图
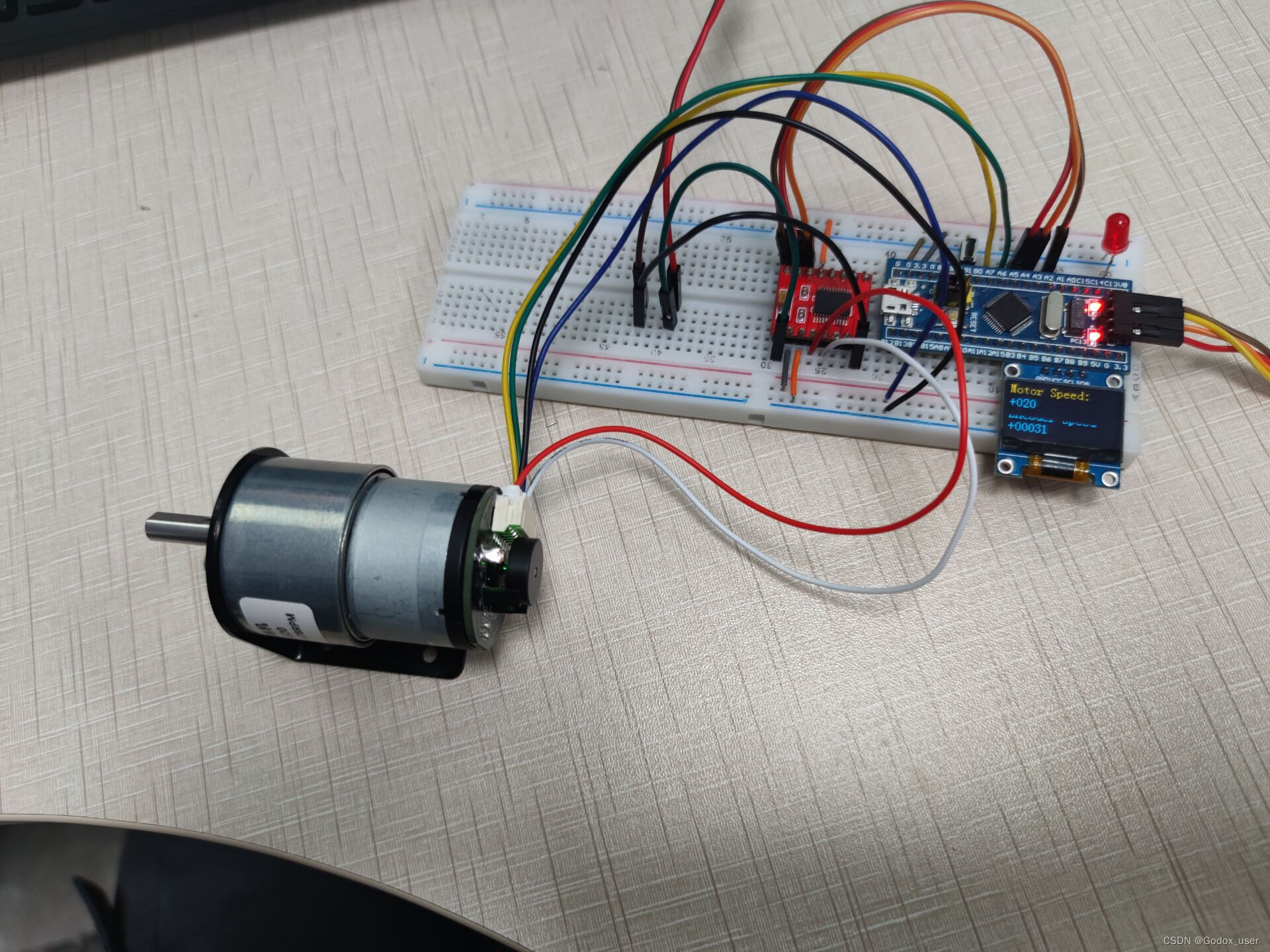
接线图
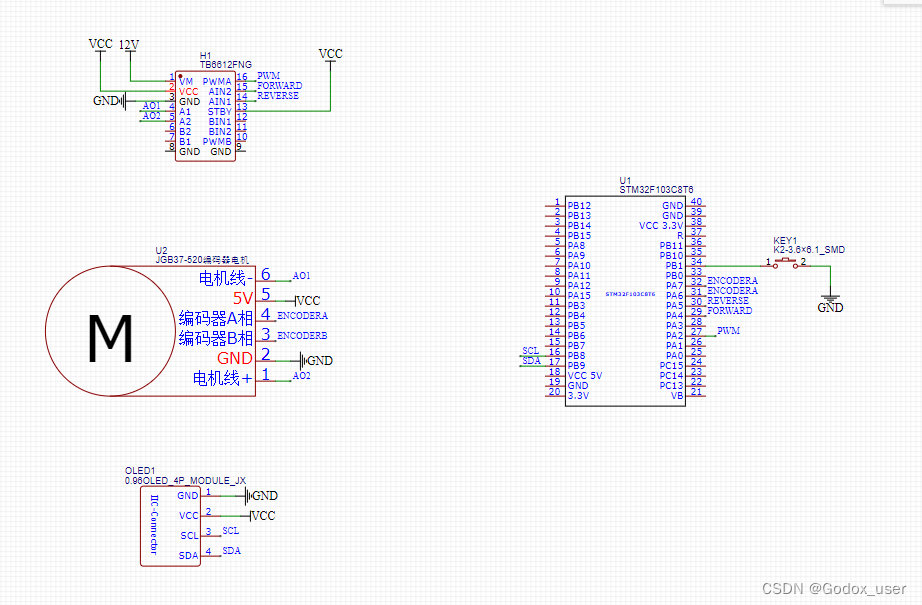
原理图
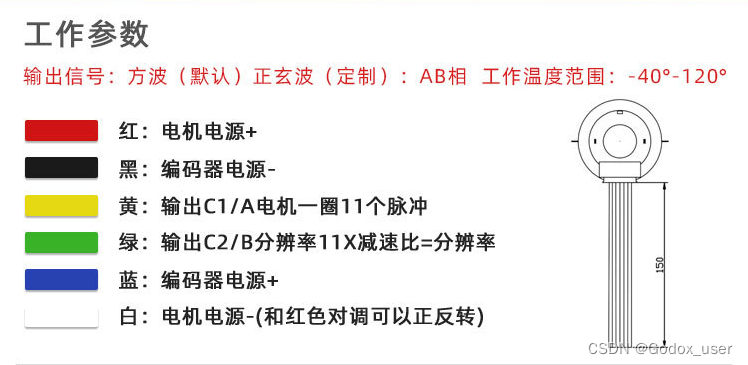
电机接线图
3.代码部分
1.主函数
main.c
2.按键部分
key.c
key.h
pwm代码
pwm.c
pwm.h
电机驱动
motor.c
motor.h
OLED显示
oled.c
oled.h
编码器捕获部分
encoder.c
encoder.h
Tim2初始化
总结
前言
笔者使用的是JGB37-520减速直流电机,使用stm32定时器输出比较生成PWM控制电机输出,使用编码器接口对电机进行测速,并通过OLED显示PWM输出占空比和电机转速。如有错误敬请大佬们斧正。
1.实验现象
直流减速电机输出控制及测速
2.实验接线及原理图
接线图
原理图
电机接线图
3.代码部分
1.主函数
main.c
#include "sys.h"
#include "key.h"
#include "motor.h"
#include "encoder.h"
#include "oled.h"
#include "tim2.h" int16_t Speed,Speed1,KeyNum,KeyCntint main(void){ Motor_Init();OLED_Init();Encoder_Init();TIM2_Init();KEY_Init();OLED_ShowString(1,1,"Motor Speed:");//显示占空比OLED_ShowString(3,1,"Encoder Speed");//显示电机每分钟转速while(1){KeyNum=Key();if(KeyNum==1){switch(KeyCnt)//按键按下电机速度切换{case 0:KeyCnt++;Speed = 10;break;case 1:KeyCnt++;Speed = 20;break;case 2:KeyCnt++;Speed = 30;break;case 3:KeyCnt++;Speed = 40;break;case 4:KeyCnt++;Speed = 50;break;case 5:KeyCnt++;Speed = 60;break;case 6:KeyCnt++;Speed = 70;break;case 7:KeyCnt++;Speed = 80;break;case 8:KeyCnt++;Speed = 90;break;case 9:KeyCnt++;Speed = 100;break;case 10:KeyCnt++;Speed = 90;break;case 11:KeyCnt++;Speed = 80;break;case 12:KeyCnt++;Speed = 70;break;case 13:KeyCnt++;Speed = 60;break;case 14:KeyCnt++;Speed = 50;break;case 15:KeyCnt++;Speed = 40;break;case 16:KeyCnt++;Speed = 30;break;case 17:KeyCnt++;Speed = 20;break;case 18:KeyCnt++;Speed = 10;break;case 19:KeyCnt=0;Speed = 0;break;} } Motor_SetSpeed(Speed);OLED_ShowSignedNum(2,1,Speed,3);OLED_ShowSignedNum(4,1,Speed1/44,5);//电机一圈11个脉冲,每个脉冲有四次边沿触发}}void TIM2_IRQHandler(void)
{static uint16_t Tim2Count0,Tim2Count1;if(TIM_GetITStatus(TIM2,TIM_IT_Update)==SET){Tim2Count0++;if(Tim2Count0>=1000)//定时器2每隔1s刷新一次脉冲个数{Speed1=Encoder_Get();Tim2Count0=0;}Tim2Count1++;if(Tim2Count1>=20)//定时器2每隔20ms扫描一次按键消抖{Key_Loop();Tim2Count1=0;}TIM_ClearITPendingBit(TIM2,TIM_IT_Update);}
}
2.按键部分
key.c
按键部分使用定时器进行消抖,不会影响到主函数代码的执行。
#include "key.h" // Device headeruint8_t Key_KeyNumber;void KEY_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;//定义一个GPIO初始化结构体GPIO_InitStructRCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin=GPIO_Pin_1;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_InitStructure);
}uint8_t Key(void)
{uint8_t Temp=0;Temp=Key_KeyNumber;Key_KeyNumber=0;return Temp;
}uint8_t Key_GetState(void)
{uint8_t KeyNumber=0;if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1)==0){KeyNumber=1;}else KeyNumber=0;return KeyNumber;
}void Key_Loop(void)
{static uint8_t NowState,LastState;LastState=NowState; //按键状态更新NowState=Key_GetState(); //获取当前按键状态//如果上个时间点按键按下,这个时间点未按下,则是松手瞬间,以此避免消抖和松手检测if(LastState==1 && NowState==0){Key_KeyNumber=1;}
}void TIM3_IRQHandler(void)
{static uint16_t Tim3Count0;if(TIM_GetITStatus(TIM3,TIM_IT_Update)==SET){Tim3Count0++;if(Tim3Count0>=10){Key_Loop();Tim3Count0=0;}TIM_ClearITPendingBit(TIM3,TIM_IT_Update);}
}
key.h
#ifndef __KEY_H
#define __KEY_H#include "sys.h"
#define KEY1 PAin(4) // PA4void KEY_Init(void);
void Key_Loop(void);
uint8_t Key_GetState(void);
uint8_t Key(void);#endif3.pwm代码
pwm.c
#include "pwm.h" void PWM_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_OCInitTypeDef TIM_OCInitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);TIM_OCStructInit(&TIM_OCInitStructure);GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin=GPIO_Pin_2;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);TIM_InternalClockConfig(TIM2);TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period=100-1;//20khz周期TIM_TimeBaseInitStructure.TIM_Prescaler=36-1;TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse=0;TIM_OC3Init(TIM2,&TIM_OCInitStructure);TIM_Cmd(TIM2,ENABLE);}void PWM_SetCompare3(uint16_t Compare)
{TIM_SetCompare3(TIM2, Compare);
}
pwm.h
#ifndef __PWM_H
#define __PWM_H
#include "sys.h"void PWM_Init(void);
void PWM_SetCompare3(uint16_t Compare);#endif4.电机驱动
motor.c
#include "motor.h"
#include "pwm.h"void Motor_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能PB,PE端口时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5; //Motor 方向控制脚GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure); PWM_Init();
}void Motor_SetSpeed(int8_t Speed)
{if (Speed >= 0){GPIO_SetBits(GPIOA, GPIO_Pin_4);GPIO_ResetBits(GPIOA, GPIO_Pin_5);PWM_SetCompare3(Speed/10);}else{GPIO_ResetBits(GPIOA, GPIO_Pin_4);GPIO_SetBits(GPIOA, GPIO_Pin_5);PWM_SetCompare3(-Speed/10);}
}
motor.h
#ifndef __Motor_H
#define __Motor_H
#include "sys.h"#define Motor_Foreward PAout(4)
#define Motor_Reverse PAout(5)
void Motor_Init(void);
void Motor_SetSpeed(int8_t Speed);#endif
5. OLED显示
oled.c
#include "stm32f10x.h"
#include "oled.h"
#include "OLED_Font.h"/*引脚配置*/
#define OLED_W_SCL(x) GPIO_WriteBit(GPIOB, GPIO_Pin_8, (BitAction)(x))
#define OLED_W_SDA(x) GPIO_WriteBit(GPIOB, GPIO_Pin_9, (BitAction)(x))/*引脚初始化*/
void OLED_I2C_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_Init(GPIOB, &GPIO_InitStructure);OLED_W_SCL(1);OLED_W_SDA(1);
}/*** @brief I2C开始* @param 无* @retval 无*/
void OLED_I2C_Start(void)
{OLED_W_SDA(1);OLED_W_SCL(1);OLED_W_SDA(0);OLED_W_SCL(0);
}/*** @brief I2C停止* @param 无* @retval 无*/
void OLED_I2C_Stop(void)
{OLED_W_SDA(0);OLED_W_SCL(1);OLED_W_SDA(1);
}/*** @brief I2C发送一个字节* @param Byte 要发送的一个字节* @retval 无*/
void OLED_I2C_SendByte(uint8_t Byte)
{uint8_t i;for (i = 0; i < 8; i++){OLED_W_SDA(Byte & (0x80 >> i));OLED_W_SCL(1);OLED_W_SCL(0);}OLED_W_SCL(1); //额外的一个时钟,不处理应答信号OLED_W_SCL(0);
}/*** @brief OLED写命令* @param Command 要写入的命令* @retval 无*/
void OLED_WriteCommand(uint8_t Command)
{OLED_I2C_Start();OLED_I2C_SendByte(0x78); //从机地址OLED_I2C_SendByte(0x00); //写命令OLED_I2C_SendByte(Command); OLED_I2C_Stop();
}/*** @brief OLED写数据* @param Data 要写入的数据* @retval 无*/
void OLED_WriteData(uint8_t Data)
{OLED_I2C_Start();OLED_I2C_SendByte(0x78); //从机地址OLED_I2C_SendByte(0x40); //写数据OLED_I2C_SendByte(Data);OLED_I2C_Stop();
}/*** @brief OLED设置光标位置* @param Y 以左上角为原点,向下方向的坐标,范围:0~7* @param X 以左上角为原点,向右方向的坐标,范围:0~127* @retval 无*/
void OLED_SetCursor(uint8_t Y, uint8_t X)
{OLED_WriteCommand(0xB0 | Y); //设置Y位置OLED_WriteCommand(0x10 | ((X & 0xF0) >> 4)); //设置X位置低4位OLED_WriteCommand(0x00 | (X & 0x0F)); //设置X位置高4位
}/*** @brief OLED清屏* @param 无* @retval 无*/
void OLED_Clear(void)
{ uint8_t i, j;for (j = 0; j < 8; j++){OLED_SetCursor(j, 0);for(i = 0; i < 128; i++){OLED_WriteData(0x00);}}
}/*** @brief OLED显示一个字符* @param Line 行位置,范围:1~4* @param Column 列位置,范围:1~16* @param Char 要显示的一个字符,范围:ASCII可见字符* @retval 无*/
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char)
{ uint8_t i;OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); //设置光标位置在上半部分for (i = 0; i < 8; i++){OLED_WriteData(OLED_F8x16[Char - ' '][i]); //显示上半部分内容}OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); //设置光标位置在下半部分for (i = 0; i < 8; i++){OLED_WriteData(OLED_F8x16[Char - ' '][i + 8]); //显示下半部分内容}
}/*** @brief OLED显示字符串* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param String 要显示的字符串,范围:ASCII可见字符* @retval 无*/
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String)
{uint8_t i;for (i = 0; String[i] != '\0'; i++){OLED_ShowChar(Line, Column + i, String[i]);}
}/*** @brief OLED次方函数* @retval 返回值等于X的Y次方*/
uint32_t OLED_Pow(uint32_t X, uint32_t Y)
{uint32_t Result = 1;while (Y--){Result *= X;}return Result;
}/*** @brief OLED显示数字(十进制,正数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~4294967295* @param Length 要显示数字的长度,范围:1~10* @retval 无*/
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i, Number / OLED_Pow(10, Length - i - 1) % 10 + '0');}
}/*** @brief OLED显示数字(十进制,带符号数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:-2147483648~2147483647* @param Length 要显示数字的长度,范围:1~10* @retval 无*/
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length)
{uint8_t i;uint32_t Number1;if (Number >= 0){OLED_ShowChar(Line, Column, '+');Number1 = Number;}else{OLED_ShowChar(Line, Column, '-');Number1 = -Number;}for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i + 1, Number1 / OLED_Pow(10, Length - i - 1) % 10 + '0');}
}/*** @brief OLED显示数字(十六进制,正数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~0xFFFFFFFF* @param Length 要显示数字的长度,范围:1~8* @retval 无*/
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i, SingleNumber;for (i = 0; i < Length; i++) {SingleNumber = Number / OLED_Pow(16, Length - i - 1) % 16;if (SingleNumber < 10){OLED_ShowChar(Line, Column + i, SingleNumber + '0');}else{OLED_ShowChar(Line, Column + i, SingleNumber - 10 + 'A');}}
}/*** @brief OLED显示数字(二进制,正数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~1111 1111 1111 1111* @param Length 要显示数字的长度,范围:1~16* @retval 无*/
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i, Number / OLED_Pow(2, Length - i - 1) % 2 + '0');}
}/*** @brief OLED初始化* @param 无* @retval 无*/
void OLED_Init(void)
{uint32_t i, j;for (i = 0; i < 1000; i++) //上电延时{for (j = 0; j < 1000; j++);}OLED_I2C_Init(); //端口初始化OLED_WriteCommand(0xAE); //关闭显示OLED_WriteCommand(0xD5); //设置显示时钟分频比/振荡器频率OLED_WriteCommand(0x80);OLED_WriteCommand(0xA8); //设置多路复用率OLED_WriteCommand(0x3F);OLED_WriteCommand(0xD3); //设置显示偏移OLED_WriteCommand(0x00);OLED_WriteCommand(0x40); //设置显示开始行OLED_WriteCommand(0xA1); //设置左右方向,0xA1正常 0xA0左右反置OLED_WriteCommand(0xC8); //设置上下方向,0xC8正常 0xC0上下反置OLED_WriteCommand(0xDA); //设置COM引脚硬件配置OLED_WriteCommand(0x12);OLED_WriteCommand(0x81); //设置对比度控制OLED_WriteCommand(0xCF);OLED_WriteCommand(0xD9); //设置预充电周期OLED_WriteCommand(0xF1);OLED_WriteCommand(0xDB); //设置VCOMH取消选择级别OLED_WriteCommand(0x30);OLED_WriteCommand(0xA4); //设置整个显示打开/关闭OLED_WriteCommand(0xA6); //设置正常/倒转显示OLED_WriteCommand(0x8D); //设置充电泵OLED_WriteCommand(0x14);OLED_WriteCommand(0xAF); //开启显示OLED_Clear(); //OLED清屏
}
oled.h
#ifndef __OLED_H
#define __OLED_Hvoid OLED_Init(void);
void OLED_Clear(void);
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char);
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String);
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length);
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);#endif
6.编码器捕获部分
encoder.c
#include "encoder.h" void Encoder_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_Period=65536-1;TIM_TimeBaseInitStructure.TIM_Prescaler=1-1;TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);TIM_ICInitTypeDef TIM_ICInitStructure;TIM_ICStructInit(&TIM_ICInitStructure);TIM_ICInitStructure.TIM_Channel=TIM_Channel_1;TIM_ICInitStructure.TIM_ICFilter=0xf;TIM_ICInit(TIM3,&TIM_ICInitStructure);TIM_ICInitStructure.TIM_Channel=TIM_Channel_2;TIM_ICInitStructure.TIM_ICFilter=0xf;TIM_ICInit(TIM3,&TIM_ICInitStructure);TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising);TIM_Cmd(TIM3,ENABLE);
}int16_t Encoder_Get(void)
{int16_t Temp;Temp=TIM_GetCounter(TIM3);TIM_SetCounter(TIM3,0);return Temp;
}
encoder.h
#ifndef __ENCODER_H
#define __ENCODER_H
#include "sys.h"void Encoder_Init(void);
int16_t Encoder_Get(void);#endif
7.Tim2初始化
tim2.c
#include "tim2.h" void TIM2_Init(void)
{TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);TIM_InternalClockConfig(TIM2);TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period=10-1;TIM_TimeBaseInitStructure.TIM_Prescaler=7200-1;TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);TIM_ClearFlag(TIM2,TIM_IT_Update);TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitStructure.NVIC_IRQChannel=TIM2_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;NVIC_InitStructure.NVIC_IRQChannelSubPriority=3;NVIC_Init(&NVIC_InitStructure);TIM_Cmd(TIM2,ENABLE);
}总结
本文仅仅简单介绍了使用STM32定时器输出比较功能产生PWM波,控制电机运动,其次是使用定时器的输入捕获功能对直流电机进行测速。
通过本次学习对于直流减速电机、霍尔编码器、定时器输入捕获和输出比较功能有了一定的了解。
本文有不足之处还请大佬指正。