早就想玩一玩无人机,奈何各种原因一直没有机会,工作之后资金富足,加上本身工作和这个相关性比较大,于是就自己DIY了一台无人机。
一.材料准备:
F450机架
GPS支架
好盈乐天 20A电调4个
YH2212 自锁电机4个
大疆NAZA-M-Lite飞控全套 + M8Ngps
3S 5200mha电池
BB响
B6AC电池充电器
9450自锁桨 2对
乐迪AT9S PRO遥控器 + 接收机
轧带若干
工具:电烙铁,焊锡丝,内六角扳手等
二.无人机组装

组装并不难,就是焊接和拧螺丝的过程,这里放一张装完的图吧,不过有需要注意的地方。
1.先焊接电调的电源线,再安装机架。
2.电机的三根线,只影响电机转向,其他不影响,调试的时候可以调整。
3.桨叶的螺纹和电机的螺纹对应是的,我称一组电机和桨叶之为动力点,动力点有顺时针逆时针两种,确定好机头方向,然后装动力点,动力点容易装反们这里要注意。调试的时候不要装桨叶,调试的时候不要装桨叶,调试的时候不要装桨叶!
4.调试的时候不要装桨叶,调试的时候不要装桨叶,调试的时候不要装桨叶!
5.飞控安装,位置要居中。GPS的指向要和飞控方向一致。
6.接受器的天线要伸长展开。
7.电机接飞控,接收器接飞控,要注意顺序,不要插错了通道,这个调试的时候也是能检查出来的,但是第一遍安装的时候就要注意。
三.调试
win10驱动安装,装不上可以看这个:【穷人飞行社07】大疆Naza M Lite飞控 驱动安装教程_哔哩哔哩_bilibili
对照说明书,进行设置。
1.飞行器设置:
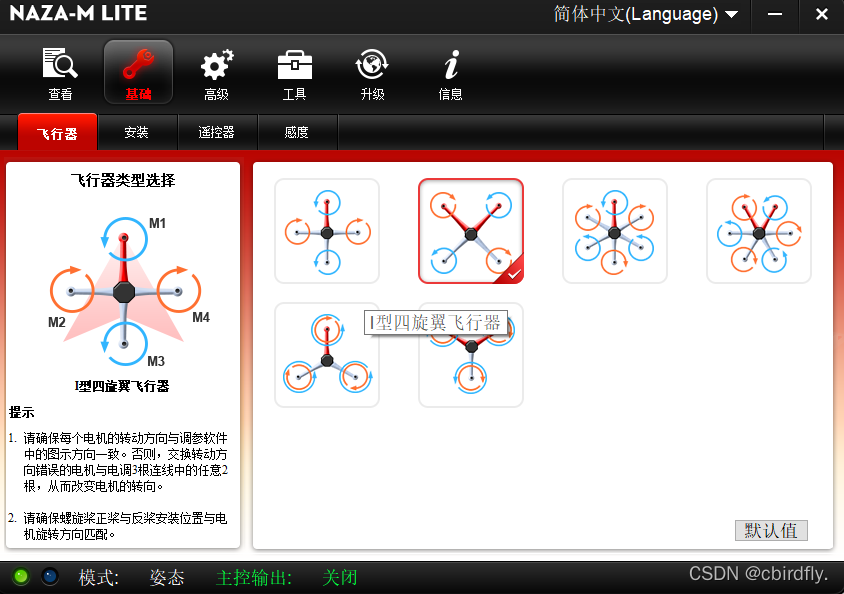
2.设置GPS位置,要用尺量一下,正负号别填错了,我的GPS在飞控右下角,所以设置如下:

3.遥控器注意通道对应,还有方向别弄反了。

这里主要是遥控器,推荐看一下这个视频:乐迪AT9S配NAZA飞控设置教程_哔哩哔哩_bilibili
这视频看一下遥控器怎么设置,具体还是要对着大疆这个上位机调试。
4.感度我是默认的,这个就是调反应速度的。

5.马达怠速选推荐,停止选智能。智能停止比较好操控,也比较安全。

6.失控保护,这个要前面遥控器也设置一下,这个主要是遥控器信号没了,它会自动返航。具体可以看说明书。

7.最后是电压,其中 智能IOC和云台 没有,所以我就不设置了。我的是3S电池,设置如下。

8.工具里面IMU校准,如果检查不用校准就不校准。到这里就设置完了。
9.先不要装桨叶,先用掰杆动作解锁,给一下油门,看看电机转向对不对,然后再装桨叶试飞,装上桨叶,再确认一次有没有装反。
10.低油门有的电机转,有的电机不转,可能是因为你的电调没有校准,电调校准也比较简单,可以看这个视频。(其中需要注意的点就是,有可能你的遥控器油门挡位是反的,因为你没有设置好,这个时候可能要去设置一下挡位反向。电调校准玩,因为动过遥控器之,所以飞控的遥控器设置需要重新校准!)电调校准可以参考这个视频:自制四轴无人机电调行程校准和试飞_哔哩哔哩_bilibili
四.看一下最终效果GPS悬停:
1.试飞之前要进行地磁校准,没有接GPS不谈,第一次安装是要校准的,具体步骤可以看说明书。
2.试飞前将飞机放平,调到GPS或者姿态模式,千万不要用手动,手动没有姿态稳定,新手必炸机,这个是给神仙用的模式,凡人就不要头铁了!
自组装无人机第一次试飞[呲牙][呲牙],真的慌得一比。[笑哭][笑哭][笑哭]