吐槽:哇,为了图像检测的期末报告,我花了两天时间,真是一句一句的翻译过来了。
话说中文网站资料是真的靠不住。。。为了Kinect2的使用,我在中文网站上摸索了一个多月,自己摸鱼走了快两个月的弯路,原来很多东西,早就有大佬做过了。。。
英语真他么重要~
正文——
用于移动机器人导航的Kinect v2:评估和建模
Kinectv2 for Mobile Robot Navigation:
Evaluationand Modeling
Péter Fankhauser ∗ , Michael Bloesch ∗ , Diego Rodriguez ∗† ,Ralf Kaestner ∗ , Marco Hutter ∗ , Roland Siegwart ∗
∗ Autonomous Systems Lab, ETH Zurich, Switzerland Robotics andEmbedded Systems, Technische Universität München, Germany
摘要:
随着微软Kinectfor Windows v2(Kinect v2)的推出,机器人和计算机视觉研究人员终于可以使用这种令人激动的新型传感器。与原来的Kinect类似,该传感器能够以高速率(30fps)获取准确的深度图像。这对机器人导航非常重要,因为可以创建密集且可靠的环境地图。与Kinect采用结构化光技术相比,Kinect v2基于飞行时间测量原理,因此也可以在室外阳光下使用(效果受限)。在本文中,我们评估Kinect v2深度传感器在移动机器人导航中的应用前景。给出了校准摄像机内在参数的结果,并测试了深度传感器的最小范围。我们分析在阴天和阳光直射的情况下室内和室外测量的数据质量。为此,我们在Kinect v2传感器的轴向和横向两个方向上引入由经验导出的噪声模型。噪声模型将测量距离、观察表面的角度和日光入射角度。这些模型可以用在各种应用的后期处理,比如对Kinectv2深度图像进行滤波。
第一节 导论
Mobile robot navigation requires a robot to perceive itssurroundings while moving through previously unseen environments. Range sensorsprovide the means to spatially capture the terrain and objects around therobot. Several requirements such as size, weight, resolution, update rate,field of view, and robustness against external light conditions influence theselection of the sensory setup. With the introduction of the original MicrosoftKinect, a low-cost depth sensor for fast and high-quality dense depth imageswas made available. Its release had a big impact in robotics and we have seen amultitude of applications (see [1] for an overview). However, the underlyingstructured-light technology is unsuitable in sunlight conditions [1] whichlimits its range to indoor applications. The second generation of the device,the Microsoft Kinect for Windows v2 (Kinect v2) [2], was introduced in 2013 andhas been available to researchers since July 2014. The new version of theKinect is based on the time-of-flight (ToF) principle and offers a higherresolution and a wider field of view in comparison to its predecessor.
移动机器人导航需要机器人在通过以前看不见的环境中,也能感知周围环境。距离传感器提供了在空间上获取机器人周围的地形和物体的手段。诸如尺寸,重量,分辨率,刷新率,视野(FOV)以及抗外部光线鲁棒性等若干要求,都会对影响传感器的选择。随着微软Kinect 1代的推出,我们终于有了一款快速、高质、有密集深度图像、低成本的深度传感器。它的发布对机器人技术具有很大的影响,我们已经看到了它的大量应用(参见[ 1 ]的概述)。然而,底层结构光技术并不适用于日光条件下[ 1 ],这限制了它的应用范围。该设备的第二代产品MicrosoftKinect for Windows v2(Kinect v2)[ 2 ]于2013年推出,自2014年7月起供研究人员使用。新版本的Kinect基于飞行时间(ToF)原理,并且与前一版本相比有更高的分辨率和更广泛的视野。
Depending on the intensity of the signal emitted to determinethe ToF, the sensor might be applicable outdoors. In this paper, we examine thepotential of the Kinect v2 for robot navigation as shown in Fig. 1 as exampleapplication. We evaluate the systematic and non-systematic errors, determinethe short-range measurement capability, and characterize the influence of theambient light for indoor, overcast, and direct sunlight situations. To otherresearchers and developers, we provide our adaption of the availableopen-source driver for the Kinect v2 with interface to the Robot OperatingSystem (ROS) as easy-to-install, package-based distribution for Linux.
根据发射信号的强度来确定ToF,传感器可能适用于户外。在本文中,我们研究了Kinect v2在机器人导航方面的潜力,如图1所示的示例应用。我们评估系统性和非系统性误差,确定短程测量能力,并描述室内、阴天和阳光直射条件下,环境光对测量的影响。对于其他研究人员和开发人员,我们将适用于Kinectv2的可用开放源代码驱动程序与机器人操作系统(ROS)的接口一起作为易于安装的基于软件包的Linux发行版

图。1。 四足机器人ETH [ 3 ]使用kinect v2传感器进行粗糙地形测绘和运动[ 4 ]。
由于最近才发布,Kinect v2相关只发布了很少的内容。 [ 5 ][ 6 ][ 7 ]的工作将原始Kinect与Kinectv2的性能进行了比较,并得出Kinect v2在深度测量的系统误差和非系统误差方面有更好的表现。 在[ 5 ],[ 8 ],[ 9 ]中,它也被作为典型,Kinect v2能够获取阴影和直射日光下的数据。 其他分析方面包括表面颜色和粗糙度对深度测量的影响[ 5],[ 6 ],[ 9 ],设备的预热[ 6 ],[ 9 ],校准[ 8 ],[ 9 ],通过水的测量[ 8 ]。我们研究的动机是提供Kinect v2深度相机的非系统误差模型,以进一步处理诸如文献[ 4 ] 中的测量。为此,本文的贡献是对Kinect v2深度传感器的轴向和横向噪声特性进行建模。我们根据测量距离和观察表面的角度,凭经验导出噪声模型。同时我们可以用相同的方法表征室内和阴天的情况,我们将模型扩展到随直射阳光入射角度的噪声模型。此外,还介绍了不同表面最小测量范围的分析。
本文的其余部分的结构如下。在第二部分中,我们将概述Kinect v2背后的技术和产品的主要规格。第三部分分析了红外(IR)相机内在参数的标准校准程序结果。第四节和第五节介绍了我们的实验装置以及室内和室外(阴天和阳光直射)条件下产生的噪声模型。最后,结论和我们的经验在第六节中得出。


图2. kinect v2通过测量光线从红外照明器传输到物体并返回红外摄像机所需的时间来检测深度。图片来自[ 12]。第二张图具有参数的图来自网上。
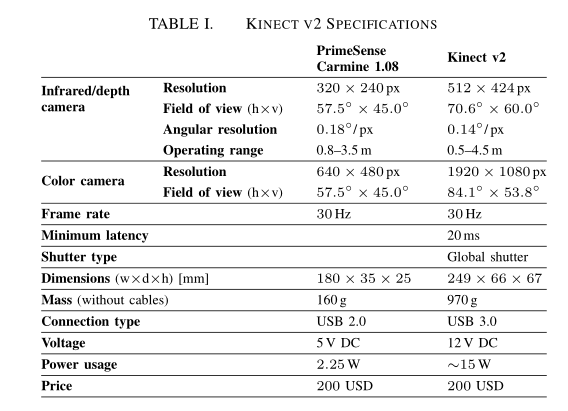
表I. Kinect v2规格表
第二节
The Kinect sensor:
我们在表1中总结了Kinectv2传感器的主要参数。该设备的尺寸与原来的Kinect for Xbox 360相似,但与PrimeSense Carmine(苹果)和华硕Xtion系列以及其他ToF传感器相比体积更大,重量更大[ 10 ]。Kinect v2和现有的ToF传感器之间在于深度相机的分辨率上有着显着差异。其他的ToF传感器的分辨率通常只有200×200像素(SoftKinetic DS325--320K×320像素)[ 6 ],而Kinect v2则具有512×424像素的分辨率。(目前小米8探索的是30000像素的分辨率。)
目前市面上常有的 3D 相机方案就就是下面3 种(自己加的内容):
- (1)结构光(Structured-light),代表公司有奥比中光(国产,比较推荐,性价比可以,也有高分辨率的款),苹果(Prime Sense),微软 Kinect-1,英特尔RealSense, Mantis Vision 等。
- (2)双目视觉(Stereo),代表公司 Leap Motion, ZED, 大疆;
- (3)光飞行时间法(TOF),代表公司微软 Kinect-2,PMD,SoftKinect, 联想Phab。
Kinect v2深度传感器测量原理基于飞行时间。选通(strobed)的红外光(见图2)照亮场景,光线被障碍物反射回来,每个像素的飞行时间由红外摄像机记录。内部使用脉冲调制和相位检测来估计与障碍物的距离(间接ToF)。有关Kinect v2深度测量方法的详细信息在[ 11 ] 中给出。
将传感器集成到机器人系统上,需要了解与深度测量相关的坐标系。图3显示了我们通过手动测量,获得的红外图像传感器的位置参数,以及第三节中描述的校准程序。我们假定红外摄像机轴与Kinect v2的前面板垂直。
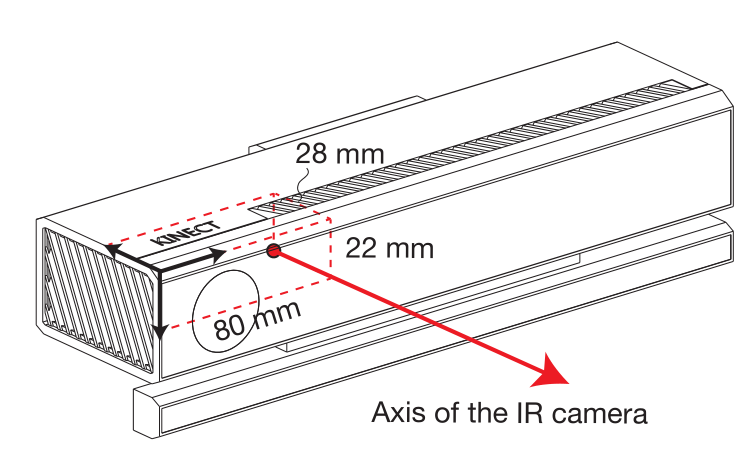
图3.红外摄像机估计的光学中心。假定红外相机的轴线垂直穿过前面板。
在这项工作过程中,我们使用了Blake等人开源的Kinect v2驱动程序。[ 13 ]以及Wiedemeyer [ 14 ] 提供的相关ROS包。为了安装简单,我们在Ubuntu 14.04 LTS(Trusty Tahr)中,安装了libfreenect2软件包及其开发头文件,[3]为这些项目做出了贡献。除了标准的基于CPU方法之外,它还支持OpenGL和OpenCL加速深度包处理。类似地,已经启动了一个用于二进制软件包的Kinect v2 ROS集成项目。
上面这段主要讲在Ubuntu系统中,安装ros系统,并且安装Kinect2支持软件——libfreenect2,以及运行过程。具体的过程可以看我以前的博客。
第三节
系统误差和校准
ToF相机深度测量结果通常受到系统的、可重现的误差和非系统性随机误差的影响。在本节中,我们分析校准过程后仍然存在的系统误差。[ 10 ]已经研究了不同类型的系统误差,我们将重点放在深度失真和幅度相关误差上。我们忽略了集成时间相关的错误,因为用户不能选择Kinect v2的集成时间(IT)。在进行测量之前,Kinect v2运行超过20分钟,引起了与温度相关的误差[6]。我们利用棋盘校准了红外摄像机的内部参数,用的是Wiedemeyer [ 14 ] 调用OpenCV的软件。校准后的平均重投影误差低于0.5像素。
我们将深度失真估计为平均测量深度与实际距离之间的差异。为此,深度传感器定位成在几个距离处垂直面对白墙。深度测量取自图像中心的小块斑点区域,平均超过100个样本。实际距离用卷尺测量,精度为±1 mm(明显没有这么高的精度~)。图4显示了0.7到2.75米范围内的结果距离偏移。偏移距离的平均值被用来确定沿着摄像机轴与深度测量相关联的坐标系的位置(图3)。 发现测得的深度失真在±6mm之间振荡,这通常被称为ToF相机的摆动误差[ 10 ],[ 15 ]。

图4.偏移距离描述了平均深度测量与真实距离之间的误差。Whiskers(胡须,大概是那个折现点上下的线段长度)描绘了一个高于和低于数据平均值的标准偏差σz。深度失真遵循距离范围内的振荡模式,这种摆动效应是由于照明器的调制过程中的不规则性而出现的[ 10],[ 15 ]。
由于物体反射的红外光不一致,通常会出现与幅度有关的误差。这可能是由于光照的不均匀、物体表面具有不同反射率和目标场景不同距离(照射亮度、距离和反射率)。我们通过比较面向白墙的传感器的数据的时间平均值与平面拟合的数据,分析了幅值相关误差。数据在相同场景的100个深度图像上进行平均,并且使用线性最小二乘回归拟合平面。图5显示与参考平面相比,每个像素的偏移距离。我们的测量显示系统深度误差取决于到障碍物和图像区域的距离。图像中心区域的误差在±6毫米的范围内,并且在2.0米的距离时,边缘处的误差增加到接近30毫米。

图5.平面壁平均快照与参考平面之间的着色深度误差(壁角通过平面拟合获得)。由于图像边界的低照度,可以观察到深度值估计过高。
第四节 内部评估:
测量数据的进一步处理(例如用于[ 4 ]中的映射)需要用合适的统计模型来表征非系统误差。为了充分利用传感器,我们对深度测量的三维噪声分布感兴趣。为此,我们凭经验导出了轴向(沿着传感器相机轴)和侧向(垂直于相机轴的方向)误差的噪声模型的参数。
A.实验设置
我们的实验设置与[ 16 ]中提出的设置相同。我们在Kinect v2传感器前放置了一个可旋转的平面目标,使其出现在图像的中心(图6)。测量是在不同的z距离和不同的旋转角度下进行的(图6a)围绕垂直轴(图像y轴)。对于静态设置,轴向噪声参数被确定为每个像素的飞行时间测量的标准偏差(图6b)。横向噪声参数是从沿平面目标垂直边缘的像素的飞行时间测量获得的(图6c)。
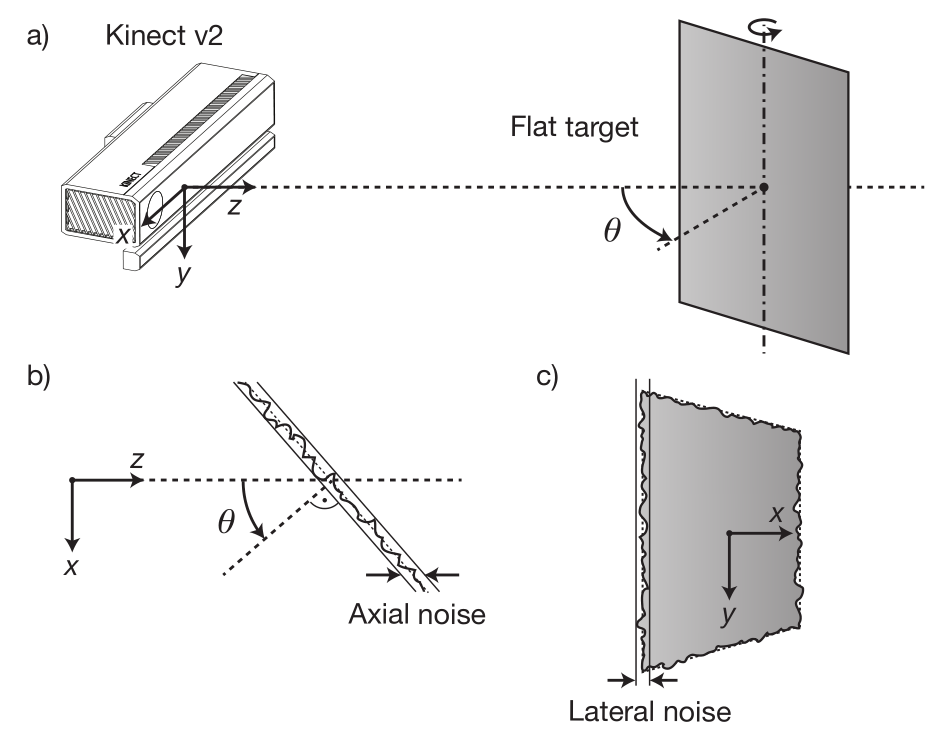
图6.评估kinectv2深度传感器的轴向和侧向噪声的实验装置。A)传感器指向不同距离的平坦目标z和角度θ 。B)目标的俯视图。轴向噪声是通过测量时间的变化来估计的z-axis轴,c)目标上的正面视图。横向噪声是从深度图像平面中沿目标边缘的像素变化中提取的。基于[ 16 ]的插图。
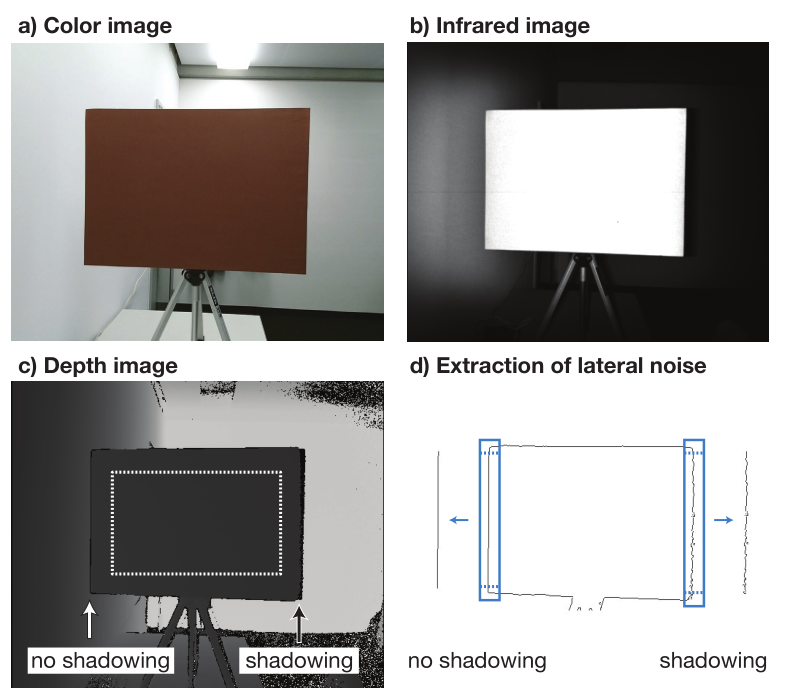
图7显示了Kinect v2产生的彩色(a),红外线(b)和深度图像(c)中目标的外观。我们通过应用一系列滤波器(阈值,侵蚀和canny边缘检测)来自动提取噪声参数的过程,以找到平面目标的角点。对于轴向噪声,我们选择了一个有定义边界的内切矩形作为目标区域,以确保测量不会被边缘效应进一步破坏(见图7c)。对于横向噪声,通过设置目标边缘附近的感兴趣区域然后裁剪上部和下部来提取边缘像素(见图7d)。
图7.来自kinectv2的示例数据以及来自彩色摄像头(a),红外摄像头(b)和深度图(c)的目标视图。从目标(c)内的区域提取轴向噪声,并从目标(d)的裁剪左/右边界产生横向噪声。由于红外发射器的遮蔽(左:没有阴影,较少的噪声/右:阴影,更多的噪声),可以在目标(c,d)的左右边缘观察到不同的噪声幅度。
B.噪音建模
将目标放置在相机前方0.7米至3.1米之间的不同距离处,增量为0.3米。对于每个目标距离,入射角在0°和75°之间变化,步长为15°。
为了确保在目标视野范围内具有相似的覆盖范围,根据目标距离使用不同的目标尺寸:2.2米至3.1米之间的距离为A2(A2纸的大小)(420毫米×594毫米),A3(297毫米×420毫米)距离为1.9米至1米,A4(210毫米×297毫米)距离为0.7米。对于每个特定的目标角度和距离,噪声是由一系列100个深度图像中的每个像素确定的。
照明器和红外摄像机位于Kinect v2中稍微不同的位置(参见图2)。这会导致由于前景对象遮挡红外光发射器而在深度图像中可见阴影的效果。在图7c中,目标的左边缘没有阴影,而在右边缘,阴影很明显。我们观察到源于受阴影影响的边缘的测量值明显更加嘈杂。出于这个原因,我们区分了对阴影存在的横向噪声分析。
一个目标角度的轴向和横向噪声分布的例子 θ = 0 ◦在图8中给出。如图所示,通过正态分布可以很好地近似轴向噪声的扩展。尽管横向噪声仅部分表征为正态分布,但我们仍然提供其经验标准差作为衡量标准,因为滤波/融合框架通常假定为高斯噪声分布。图9显示了在一定范围内的轴向和横向误差的标准偏差z-目标旋转角度 θ。对于轴向噪声,标准偏差σz是距离z呈正二次相关,并且在角度0 ◦ < θ < 45 ◦时σz小于4毫米,但角度大于45度时,σz就会迅速增加。我们将轴向噪声的标准偏差近似为z[米]的二次函数为

其回归的均方根(RMS)误差为0.002毫米。类似于[ 16 ]中的模型,当θ接近90°时,我们添加了一个自变量为θ[rad]的双曲线项,来解释快速增长的噪声,并手动确定该因子z(3/2),如图9所示,横向噪声没有明显的趋势,可以观察到σL的值。因此,为了进一步应用,对横向噪声整个范围的z和θ,我们建议采取的保守估计。基于90%标准差,横向噪声标准偏差的保守值是
σL= 1.6mm 边界无阴影区域, (2)
σL= 3.1mm 边界有阴影区域. (3)
C.近距离评估
在短距离内,主动照明可能会导致,红外接收传感器单元过度饱和。如图10所示,我们在红外明亮和黑暗的目标表面,测试了Kinect v2的短距离测量特性。获得的深度测量分为三组:有效数据,无数据(由传感器检测)和异常值(在后期处理中确定)。
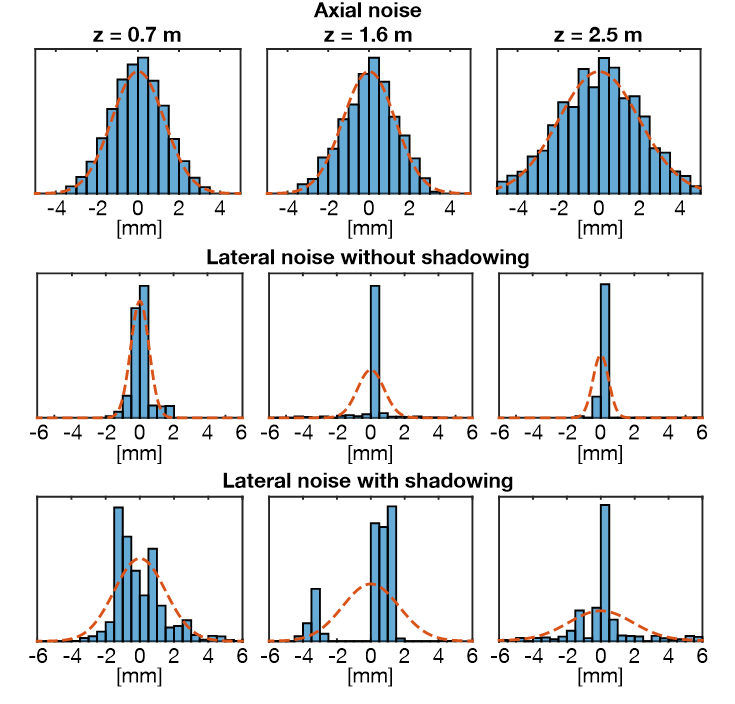
图8.直方图显示了三个轴向噪声(顶行),没有阴影的横向噪声(中间行)和带有阴影的横向噪声(底行)
对于这三个目标距离z,在角度θ = 0◦情况下。大约用了10'000个深度测量。拟合的正态分布(使用经验标准差)绘制为虚线。
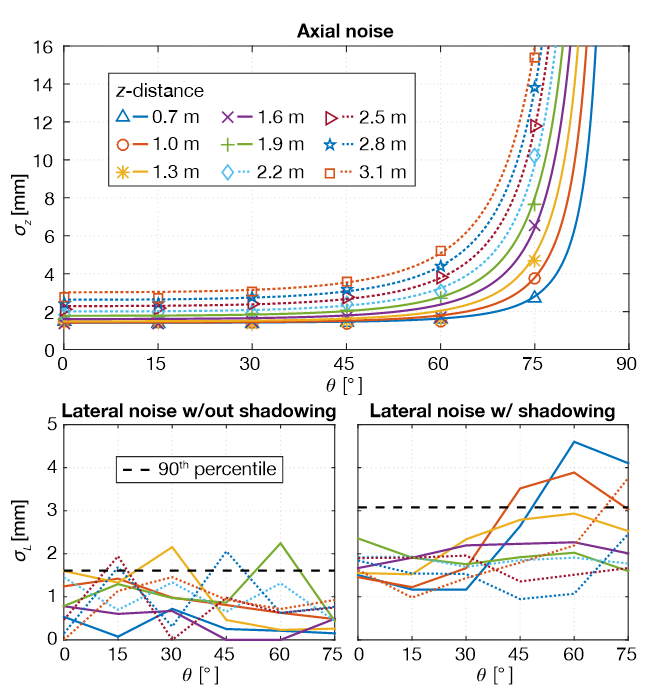
图9.轴向和侧向噪声的测量和拟合模型。
轴向噪声σz 与测量距离z成二次方关系,并当角度θ = 90◦时,趋向无穷。即很明显随着距离z的增加,噪声越大。且与角度呈二次关系(感觉是指数关系)。
由于横向噪声σL没有明显的趋势中(乱七八糟的重合曲线),我们提出了90%的保守值用于进一步的应用(即无阴影为1.5mm,有阴影3mm)。
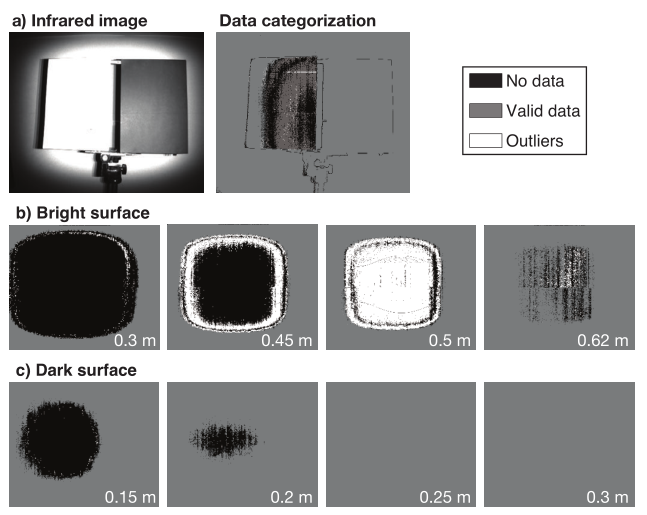
图10.明暗样本中用红外相机检查最小距离(a)。短距离时,表面过亮(反射率高),可以观察到主动红外照明使得红外相机过度饱和,导致测量无效(b)。黑色表面有较低反射率,允许在相当短的距离内进行有效的测量。(c)
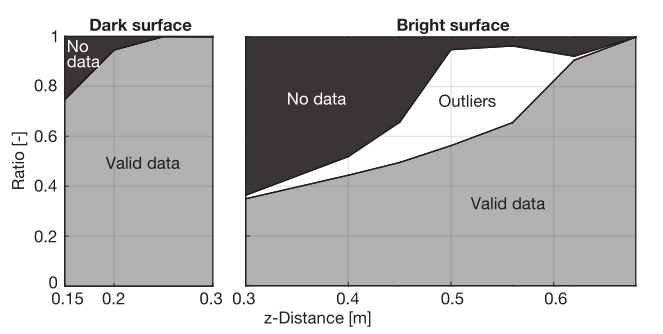
图11. 有效数据、无数据和异常值之间的比率,绘制了短距离红外线的明暗表面的情况。
可以看到暗色表面(左图),距离z>0.25米时,kinect v2传感器能够可靠地测量。在亮面(右侧),则测量距离需要达到0.7米才能不被破坏。
如图11所示,表面反射率对短程测量性能有很大影响。具有明亮的表面,测试距离z<0.7m时,Kinect v2会发布相当数量的缺失数据和异常距离值。传感器在过度饱和的时候努力检测,可以在有效数据和无数据之间作为异常值瞬态观察到,即异常值一闪而过,无法稳定获取。同样在短距离时,暗表面进行测量的误差相比较小,而且Kinect v2可靠工作距离可以下降到z=0.25m。(这个不是很清楚,听说可以调内部的参数,使得测量范围从0.5m到4.5m,扩展到0.5m以内和4.5m以外。)
第五节 室外评估
外部高强度红外光使得ToF传感器难以区分主动发射的红外信号与外部光。而在户外导航中,我们对阴天和直射阳光下的深度测量性能感兴趣。

图12. 日光直接测量实验装置的顶视图。除了距离z和目标角度 θ,我们指定了太阳入射角为α。
A.实验设置
我们使用与室内实验相同的方法,研究了有阳光存在的Kinect v2深度测量性能。假设一个理想的漫反射目标表面,我们可以通过用入射角α建模,描述太阳光的影响,如图12所示。为了简化测量,我们设置了实验,使得太阳直接位于Kinect v2传感器的后面,即α = θ。用勒克斯米(流明?)测量目标上环境光的强度,阴天为1-12kLux,阳光直射为85-95kLux。
B.噪音表征
对于阴天情况,我们可以通过调整室内模型(1)的系数来捕捉噪声振幅的主要特征:

结果RMS回归误差为0.55mm(室内为0.002 mm)。我们发现1.0-2.8米之间的范围可以可靠地测量,而超出此范围的测量被认为是不可靠的,因此在噪声模型拟合中被忽略。对于横向噪声,我们再次使用标准偏差的90%作为固定值,并且没有考虑阴影效应。
σL = 6.8mm , (5)
而我们的测量表明,通过将Kinect v2暴露于阴暗的光线中,深度测量中的轴向噪声和横向噪声要比预期增加2-3倍。

图13.示例图像说明了直接日光对深度测量数据质量的影响。A)阴天和直射阳光之间的比较显示,在目标距离z = 1.6m相同下,阳光下的数据质量显著降低。B)以角度θ = α = 15◦对目标平面的图像进行采样,显示距离增加时,无效测量数量快速增加。
在阳光直射下,观察到传感器与目标的距离z和阳光入射角a对测量结果影响都很强烈。图13a显示了阴天和阳光直射环境之间的区别。在阴天的情况下z=1.6m处,可以获得100%有效的测量结果,但是在阳光直射的情况下使用相同的设置只能捕获很少的有效数据。目标角度θ = 15◦时,测量数据质量随着目标距离增加,快速退化如图13b所示。

图14. 在阳光直射场景中,随着距离z和角度 θ =α增加,有效数据,无数据和异常值之间的比率变化。目标距离z越大、阳光入射角α越小,意味着更多阳光直射到传感器,即会降低kinect v2进行有效测量的可靠性。
图14给出了随着测量距离z和阳光入射角α变化,有效数据,异常值和无数据比率的影响的分析。距离z<1.0m,即使在目标平面被阳光垂直照射下也可以获得可靠的测量结果。z>1.9m时,有效数据量一直下降以至于直到基本上没有数据可以收集到。我们还观察到,阳光入射角对测量性能有很大影响。特别当我们发现入射角太直接(最大的α=0◦),会导致很大的数据质量下降,相比入射角不直接(比如α = 75◦)。这种现象也反映在噪声幅度特性中。
图15显示了轴向标准偏差σz作为目标角度 α = θ的函数。一般来说,阳光直射环境下的测量噪声大约比室内场景高一个数量级。由于我们已经确定了没有环境光影响的传感器噪声特性(图9),我们可能认为,较小角度θ = α时的噪声增加是由于阳光的存在。正如兰伯特(Lambert)余弦定律所描述的那样,目标观测到的强度(假设是理想漫反射)与入射角α的余弦成正比。我们引入对COSα的依赖性,因此扩展我们现有的模型

其中z2手动确定。结果模型描述了RMS回归误差为4.4 mm的噪声特性。
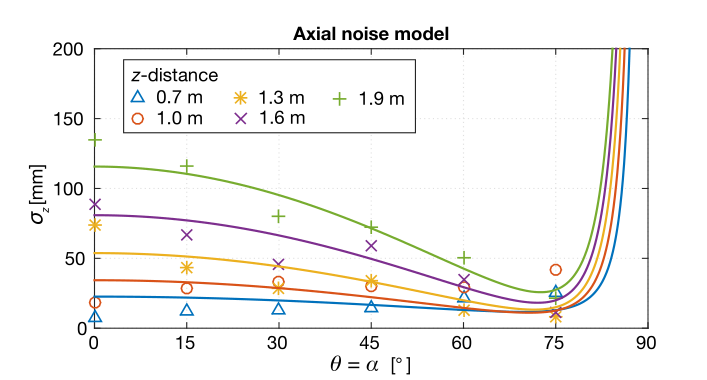
图15. 图描述了阳光直射下,经验确定的轴向噪声标准偏差σz。为了简化实验,测量是在太阳直接位于传感器后面进行的,因此α = θ。噪声大小随测量距离z变大和入射角度α = θ变下而增加。绘制线对应于考虑了日光角度α的扩展模型拟合。
第六部分 结论
在这项工作中,为了验证在移动机器人导航中的前景,我们对Kinect v2进行性能评估。我们给出了系统误差和近距离测量能力的分析。为了进一步处理数据,提出了近似轴向和横向噪声幅值的经验模型。在室外和阴暗条件下,模型表示了测量距离z和相机红外光入射目标表面角度θ的函数。为了揭示阳光直射暴露的影响,模型添加了阳光入射角的自变量α。

表二。原始的kinect和kinectv2比较
表II总结了原始Kinect和Kinectv2在室内,阴天和直射阳光下的噪声特性的定量比较。这些值是针对两种配置给出的:
[A: z = 1.0m, θ = 45◦ ] and [B: z = 2.8m, θ= 10◦ ]
它们对应于安装在移动机器人上的Kinect传感器的典型配置。Kinect v2比Kinect 1代轴向噪声明显更低,特别是在距离更远的情况下(配置B)。对于横向噪声,两种版本的传感器显示相似的性能。Kinect v2可以在阴天的室外使用,因为有效的测量范围可以高达〜2.8米。然而,与室内场景相比,必须有2-3倍的噪声放大的预估。在阳光直射下,Kinect v2的数据质量强烈依赖于到目标的距离和太阳光的入射角度。尽管在配置A中获取了合理数量的数据,但在配置B下就无法获取数据。在~1.9m以内,我们可以获得有效的测量数据,但是噪声的增加量大约为一个数量级应该要考虑到。
根据我们对Kinect v2的实验和经验,得出结论:对于移动机器人来说,该系统在好几处都表现出不错的性能。由于采用了ToF技术,即使在无纹理或者光线不足的场景中也能有稳定的深度测量结果。和其他ToF传感器以及Kinect 1代相比,Kinect v2有更高的分辨率,所以会获取大量数据(6.5 mio.points/s)(最小可分辨对象是,6.5个像素?)。这允许映射算法可以精细的模拟环境并检测出很薄的障碍物。Kinect v2相比Kinect 1代在户外阳光下情况有了重大改进。原始版本1代不适合户外使用,而Kinect v2就能在不超过2m外的室外环境下进行测量。另外Kinect v2具有一个高分辨率的彩色相机,和一个主动照明的红外相机,甚至可以在昏暗条件下提供环境信息。
但是,在移动机器人上使用Kinect v2时,还应该考虑一些限制。Kinect v2仅适用于不在乎大尺寸、大质量和高功耗设备的机器人。因为具有最小的测量距离(0.5m),可能导致物体靠近机器人时,传感器无法识别。根据应用的不同,例如与旋转式激光扫描仪(激光雷达?接近360的视场)进行比较时,Kinect v2的视场可能会受到限制。此外,噪音和异常值特征(特别是在直射阳光下)会导致深度测量的不完整。因此,需要一个合适的后期处理框架,在随后的处理中去除这些测量错误值。
我们对Kinect v2的研究提供了在移动机器人应用相机的潜在价值的第一见解。但是,在未来的工作中还需要探索其他一些方面。例如,需要解决如何在依赖于环境的模型(室内,阴天和阳光直射)之间切换或内插的问题。我们设想可以通过额外的传感器来解决,以测量环境的光强度或从测量噪声中在线估计外部光线。此外,应该推出更高级的校准程序,以进一步减少系统误差。虽然风扇调节传感器的加热,但似乎环境温度对与户外使用相关的一系列热环境的影响也值得研究。特别是对于快速移动的机器人或非平稳环境,运动造成的模糊,可能会恶化深度测量。试验硬件/软件修改以减少最小测量距离会非常有趣。制造商已经演示了一种实验性的近距离固件[ 17 ],将测量范围缩小到0.1-1.0 m,但尚未发布我们所需要的最佳范围。
致辞
作者要感谢Joshua Blake,Florian Echtler和Christian Kerl对libfreenect2的贡献[ 13 ]。我们非常感谢来自不来梅大学的Thiemo Wiedemeyer在IAI Kinect2上的工作[ 14 ]。非常感谢Andreas Lauber对Kinect v2的CAD建模。
瑞士国家科学基金会(SNF)通过项目200021_149427 / 1和国家研究机器人能力中心支持了这项工作。




{kind=link}
{kind=link}
{kind=link}