欢迎大家阅读2345VOR的博客【6. 激光雷达接入ROS】🥳🥳🥳
2345VOR鹏鹏主页: 已获得CSDN《嵌入式领域优质创作者》称号👻👻👻,座右铭:脚踏实地,仰望星空🛹🛹🛹
🎏🎏主要开发专栏🎏🎏
《arduino学习》:学习最简单开源便利的单片机Arduino,与时俱进😆😆😆
《Arduino编程参考》:本专栏围绕Arduino语法和Arduino库使用开发;🌻🌻🌻
《 Arduino小项目开发》:本专栏围绕Arduino生态结合实际需求设计综合的小项目开发。🌼🌼🌼
《HomeAssistant》:介绍homeassistant中基本开发, 重点设计esphome和nodered开发,包含小爱同学打印机等诸多设备添加。🎉🎉🎉
本文章属于《Ubuntu学习》和《ROS机器人学习》
:围绕Ubuntu系统基本配置及相关命令行学习记录!机器人操作系统 (ROS) 是一组软件库和工具,可帮助您构建机器人应用程序。👍👍👍
1. 前言
Ubuntu环境搭建
【经典Ubuntu20.04版本U盘安装双系统教程】
【Windows10安装或重装ubuntu18.04双系统教程】
【Ubuntu同步系统时间】
【Ubuntu中截图工具】
【Ubuntu安装QQ】
【Ubuntu安装后基本配置】
【Ubuntu启动菜单的默认项】
【ubuntu系统中修改hosts配置】
【18.04Ubuntu中解决无法识别显示屏】
ROS学习笔记
【1. Ubuntu18.04安装ROS Melodic】
【2. 在Github上寻找安装ROS软件包】
【3. 初学ROS,年轻人的第一个Node节点】
【4. ROS的主要通讯方式:Topic话题与Message消息】
【5. ROS机器人的运动控制】
接下来学习激光雷达如何接入ros机器人,激光雷达是用来探测周围障碍物的分布状况!
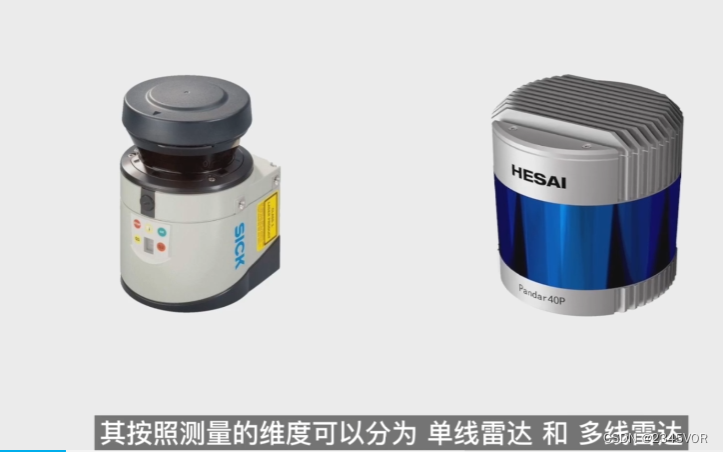
2. 激光雷达分类
其按照测量的维度可以分为单线雷达和多线雷达
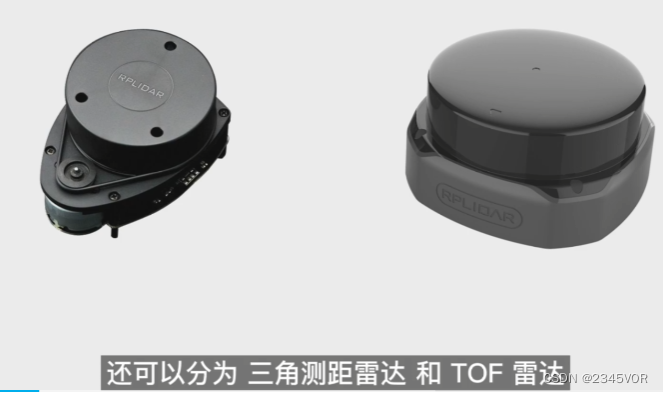
按照测量原理分为三角测距雷达和TOF雷达
根据工作方式分为机械旋转雷达和固态雷达

激光雷达虽各有不同,但是在ROS中呈现的数据格式是一样的,只是在数据完整度和精度上会有所差异。下面就选取TOF激光雷达作为例子
3. TOF和三角测距激光雷达
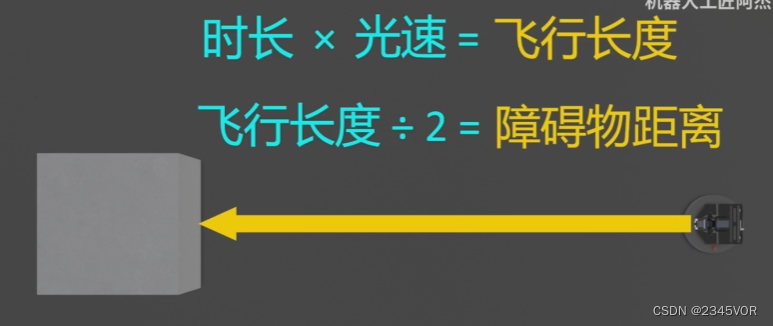
3.1 何为飞行时间测距(TOF)?
简单来说,就是计算光的“飞行时间”。
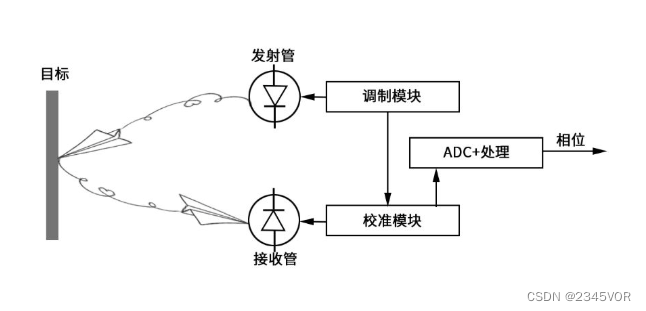
由激光器发射一个激光脉冲,通过计时器记录下光的出射和回返的时间,两个时间相减即可得到光的“飞行时间”,而光速是固定的,根据已知速度和时间就可以计算出距离。
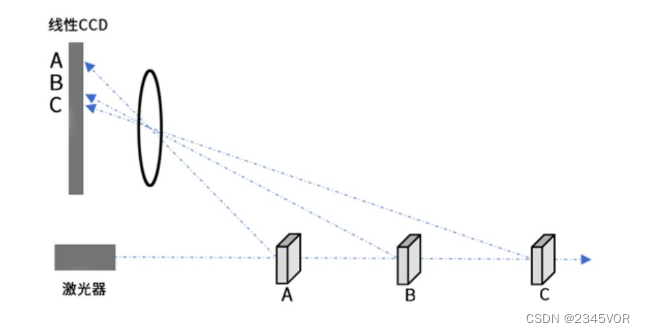
3.2 何为三角测距?
三角测距采用激光器发射激光,在照射到物体之后,反射光会由线性CCD接收,因为激光器和探测器间隔了一段距离,所以根据光学路径,不同距离的物体将会在CCD上成像在不同的位置,按照三角公式进行计算,就可以推导出被测物体的距离。
3.3 激光雷达测距
TOF激光雷达计算如下
4. 使用RViz观测传感器数据
RViz这个工具的全名叫做 The Robot Visualization Tool
4.1 运行模板样机
打开三个终端分别运行三条指令
roscore
roslaunch wpr_simulation wpb_simple.launch
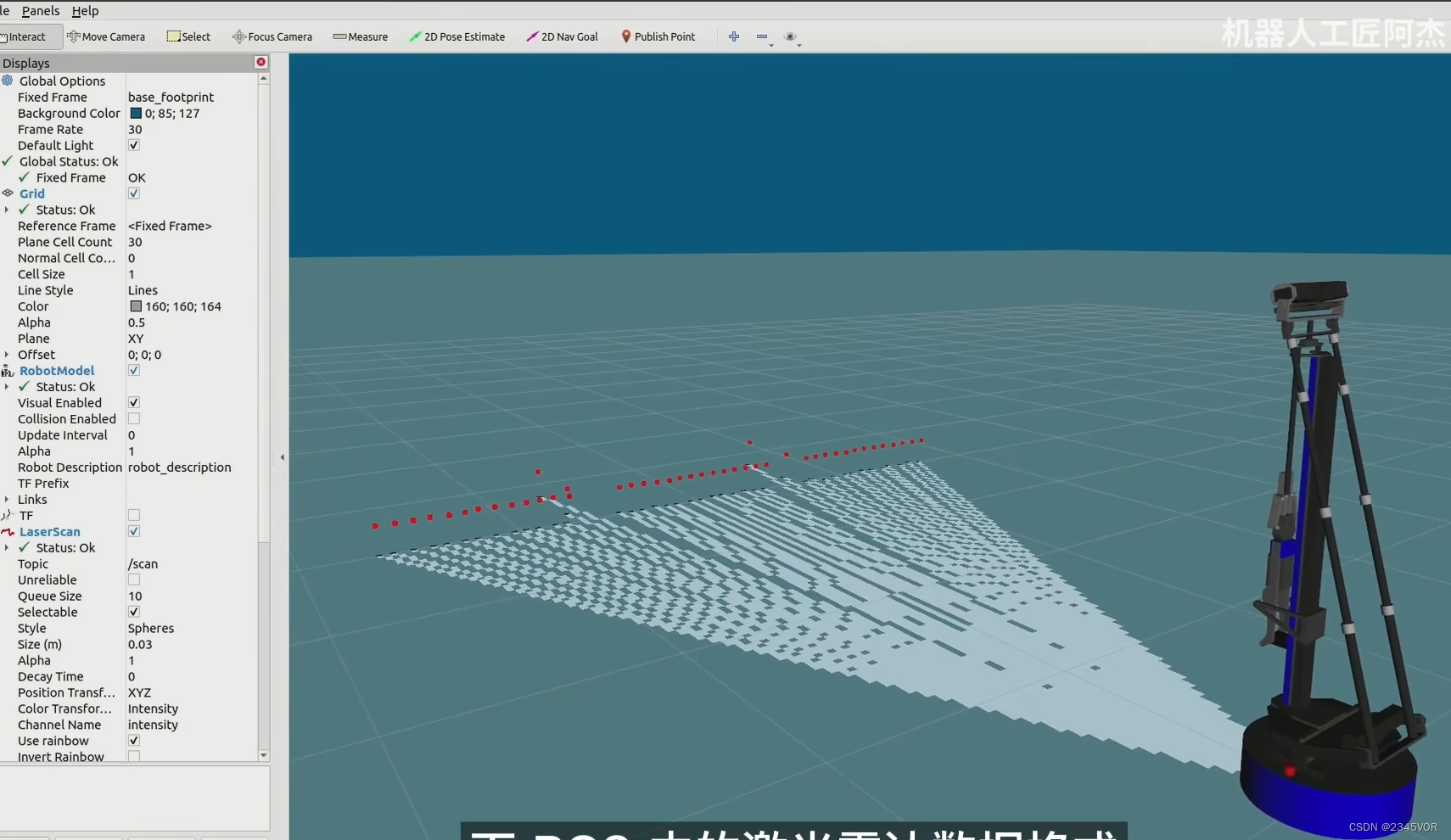
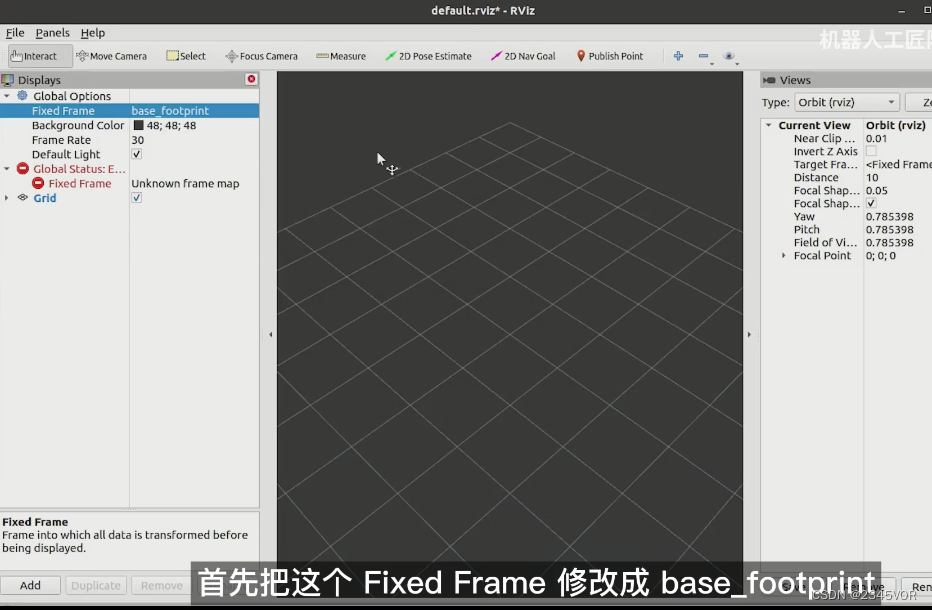
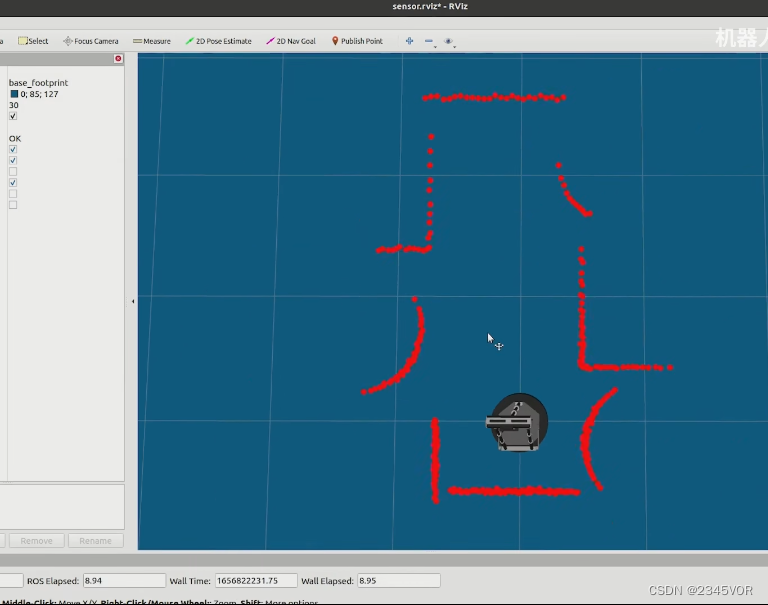
rviz首先把这个Fixed Frame修改成base_footprint
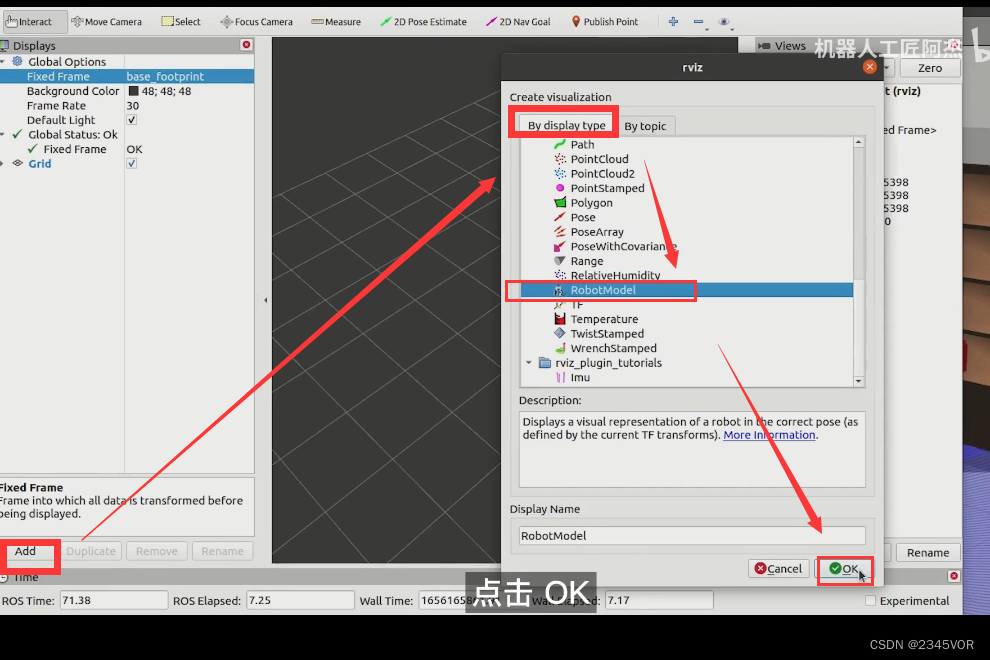
状态栏添加机器人模型,最后点击ok
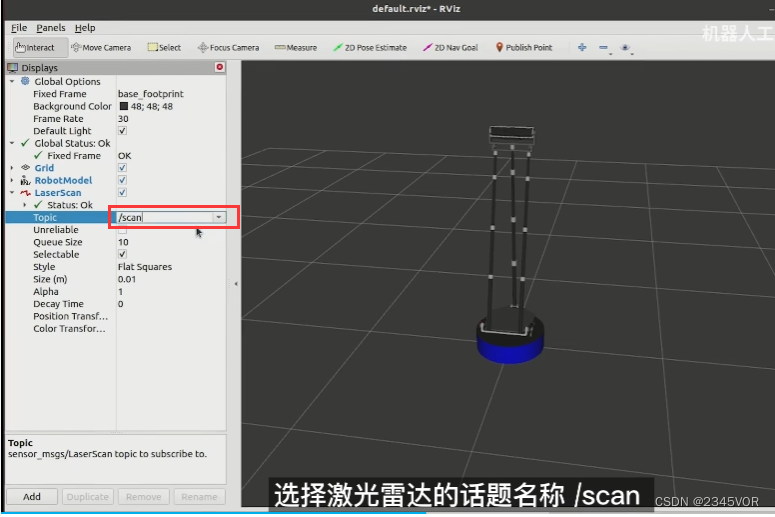
选择激光雷达的话题名称/scan
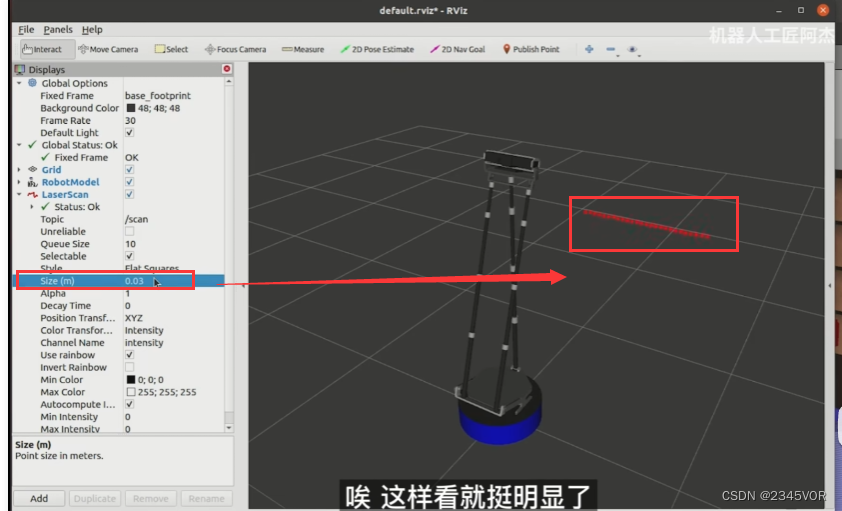
调整size为0.03
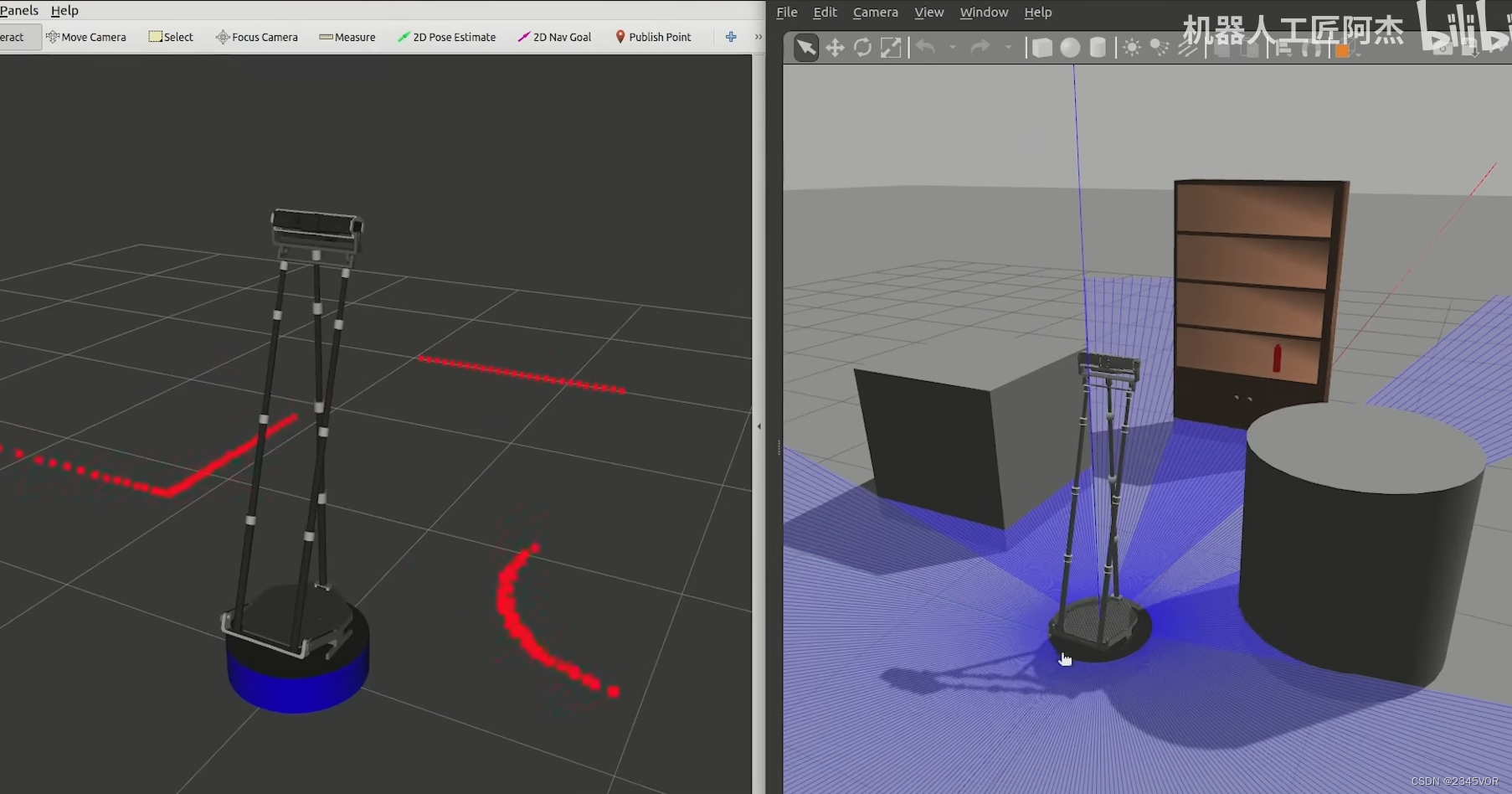
调整RViz和Gazebo分屏
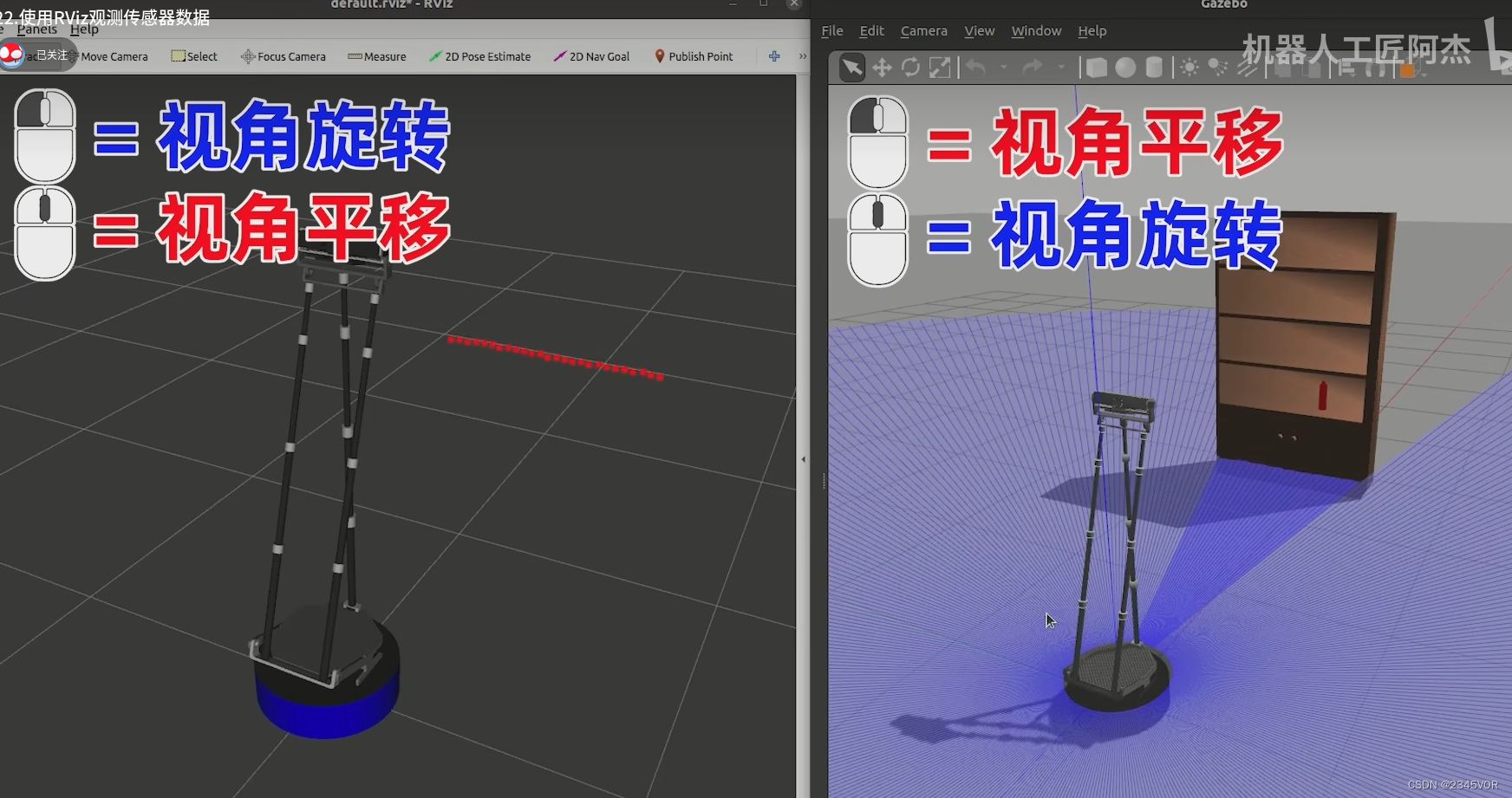
Gazebo是模拟真实机器人发出传感器数据的工具
RViz显示的是机器人实际能探测到的环境状况
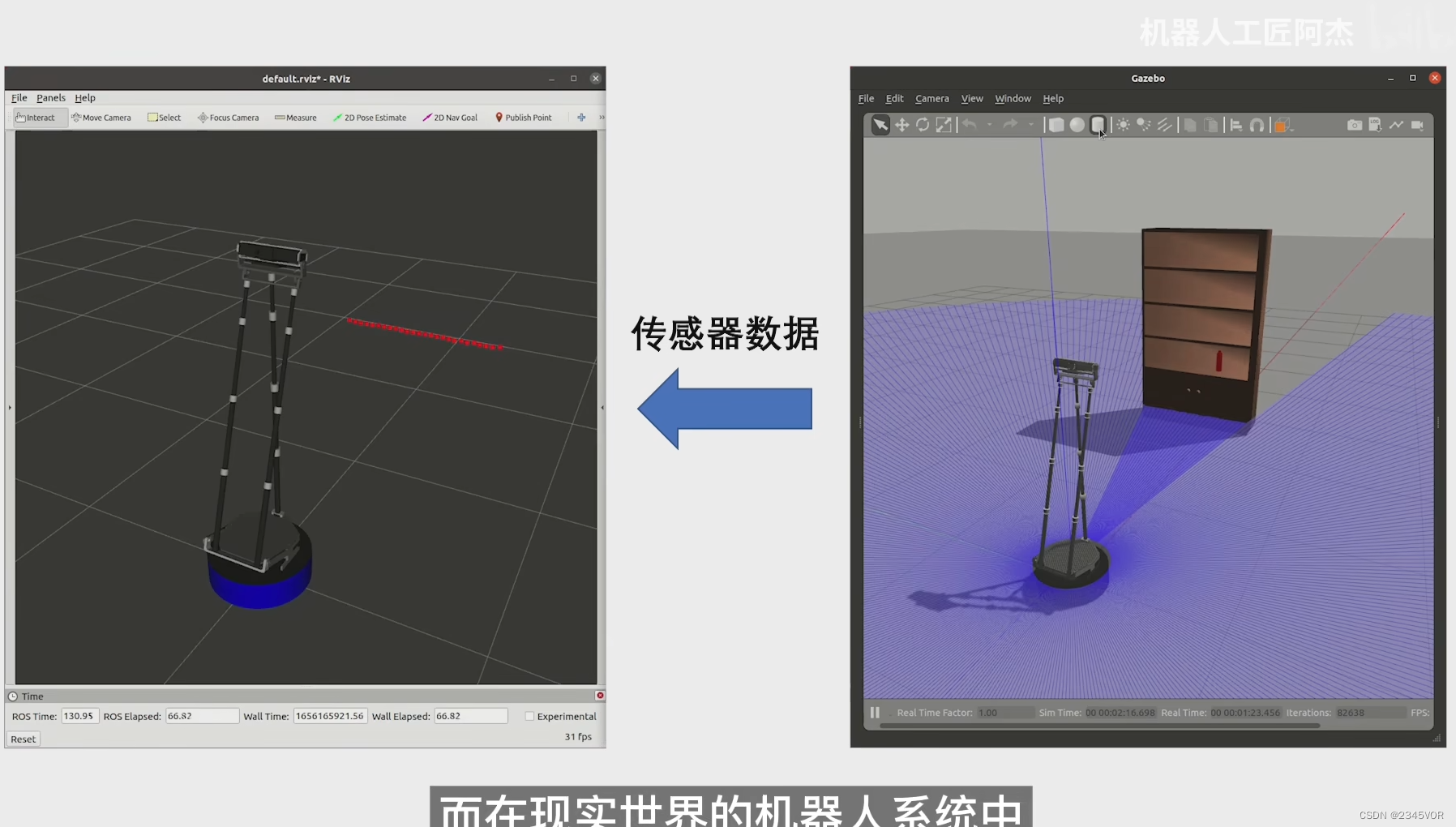
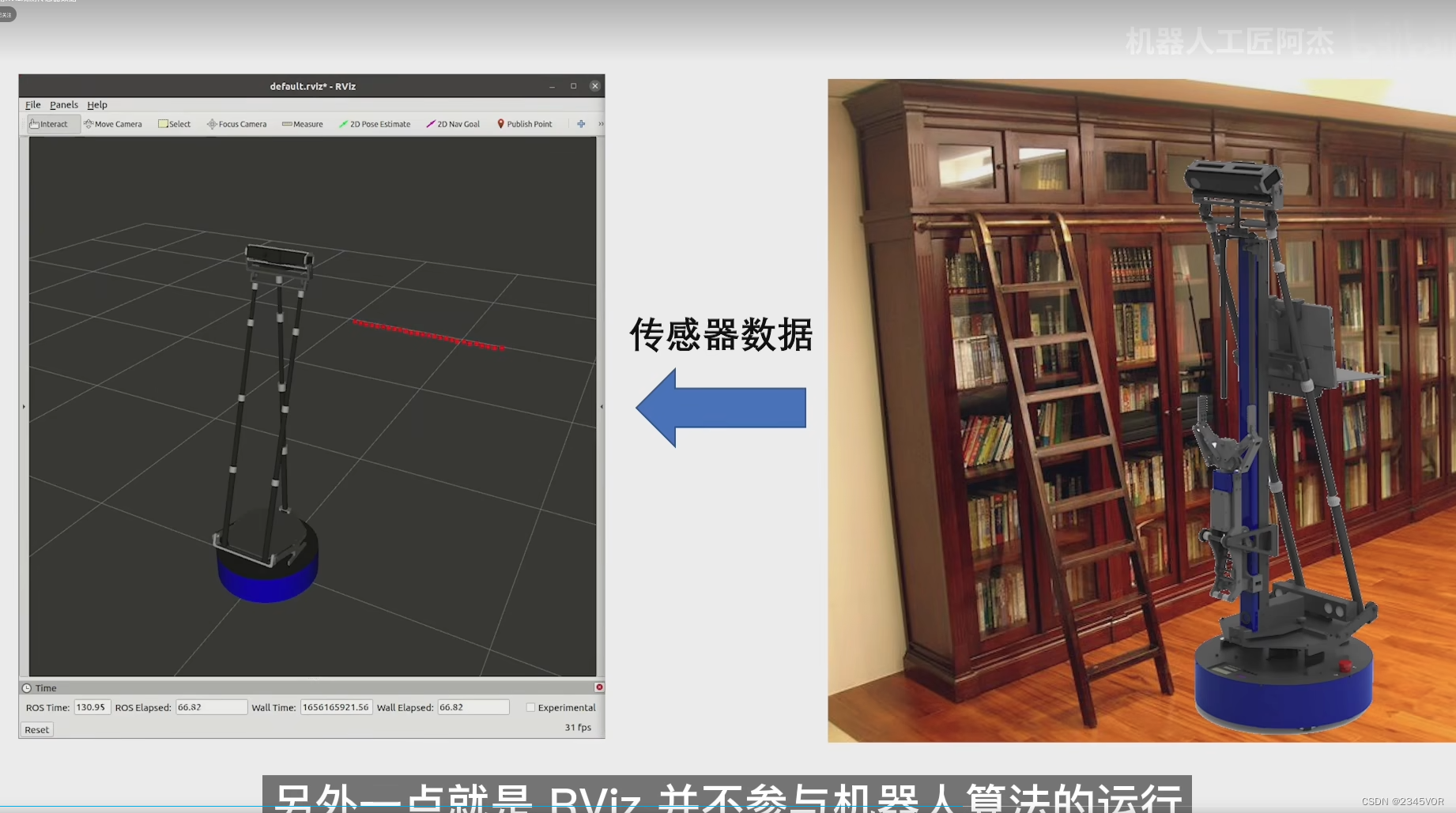
另外一点就是RViz并不参与机器人算法的运行,它只是一个为了方便人类进行观测的工具而已
即使没有RViz,也不影响机器人的ROS系统的运行
只有需要观察某些数据实时变化的时候,才会打开RViz
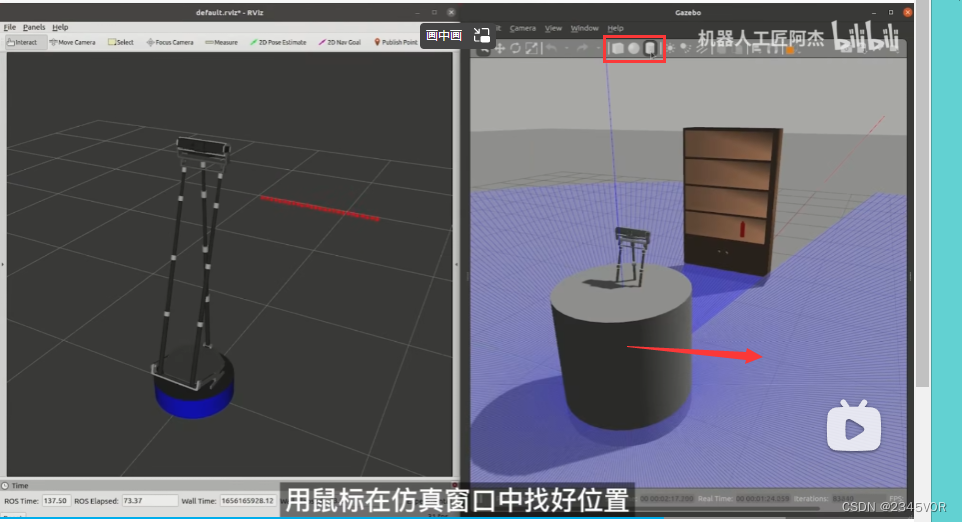
下面添加虚拟环境的圆柱体障碍物
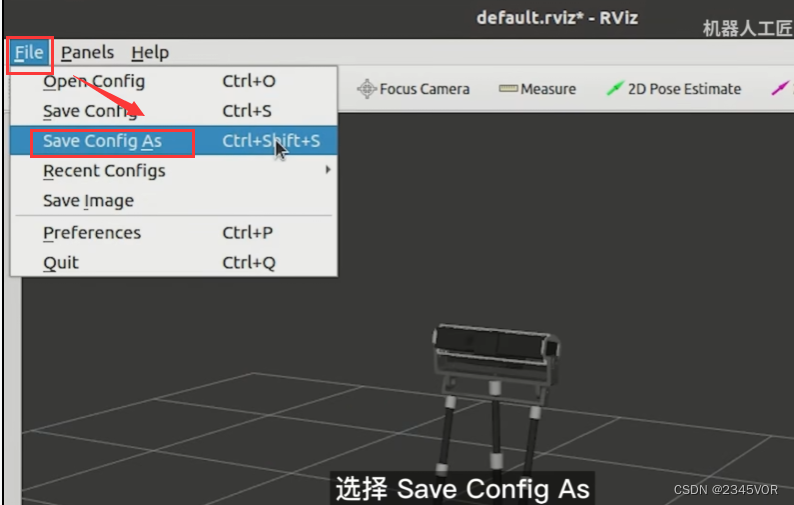
4.2 保存RViz配置
点击file菜单,选择Save Config As
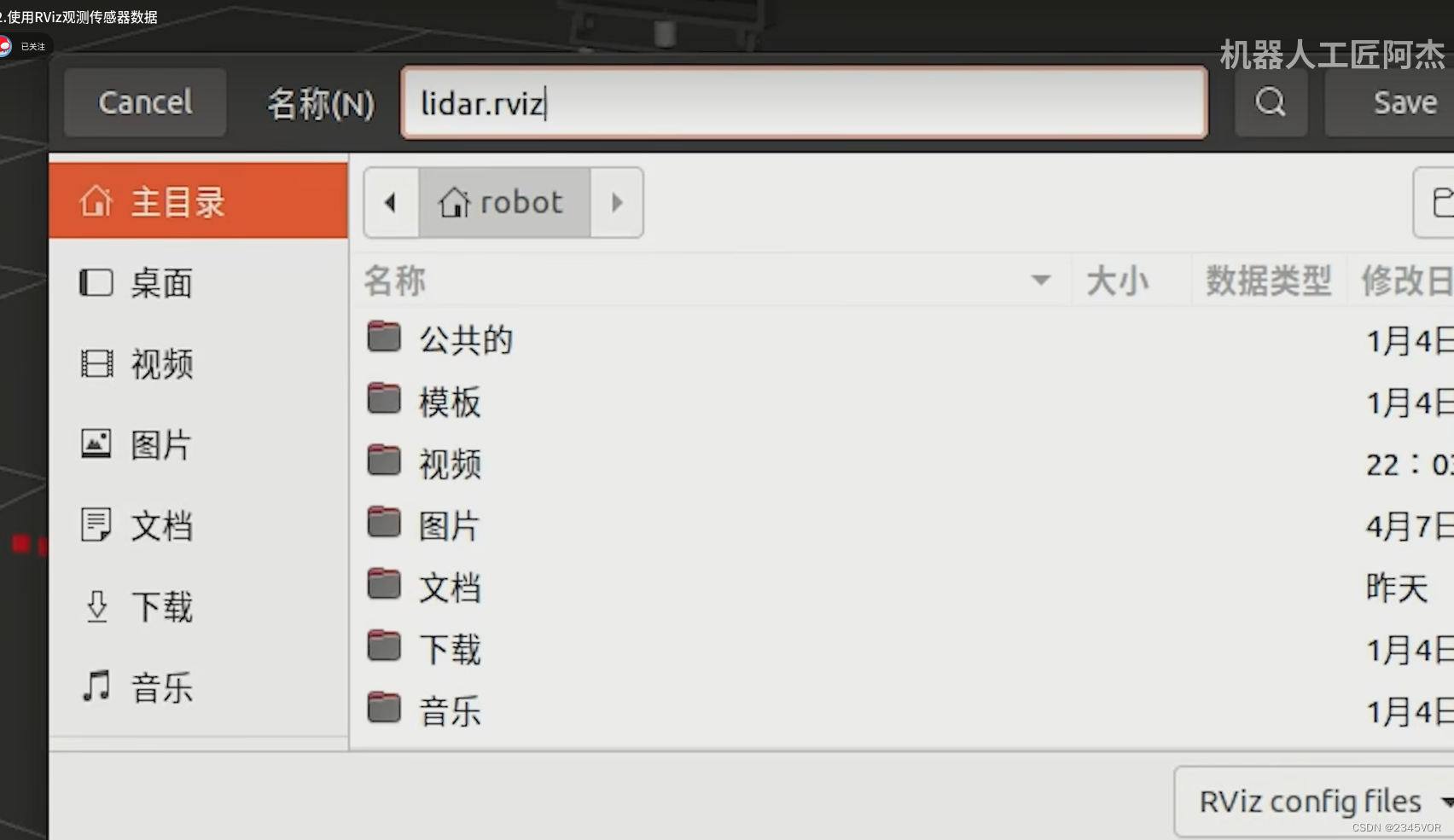
选择保存地址,方便后期直接加载
然后关闭所有终端
打开三个终端分别运行三条指令
roscore
roslaunch wpr_simulation wpb_simple.launch
rviz然后在RViz中的file菜单,选择Open Config
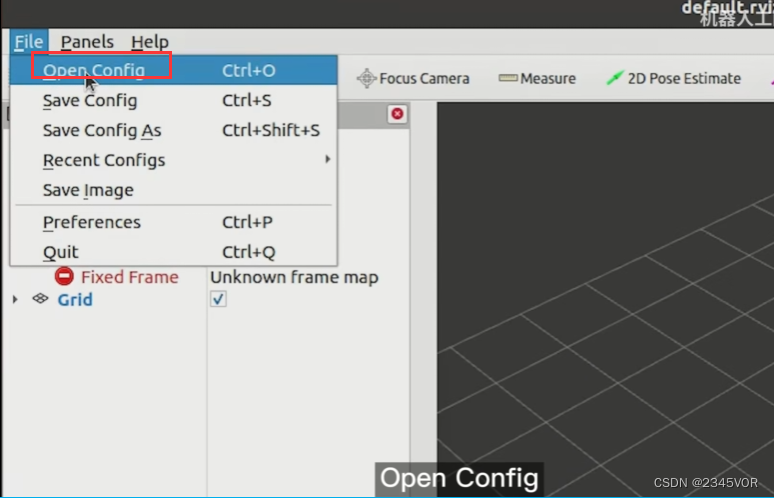
然后选择刚保存的位置
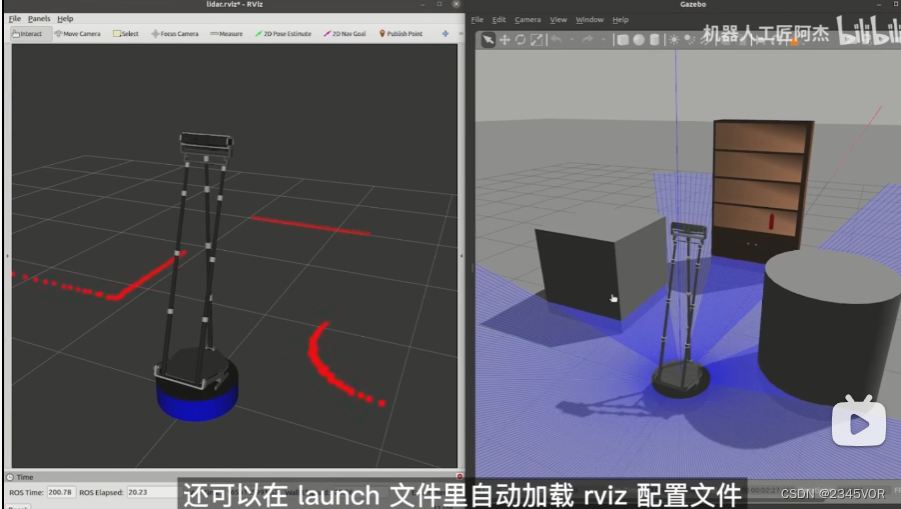
4.3 自动加载rviz配置文件
还可以在launch文件里自动加载rviz配置文件
先关闭RViz,然后打开终端输入
roslaunch wpr_simulation wpb_rviz.launch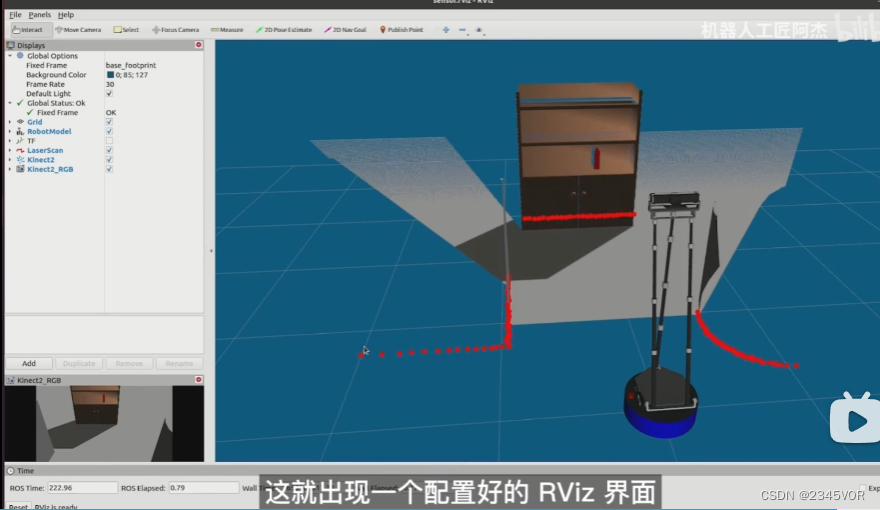
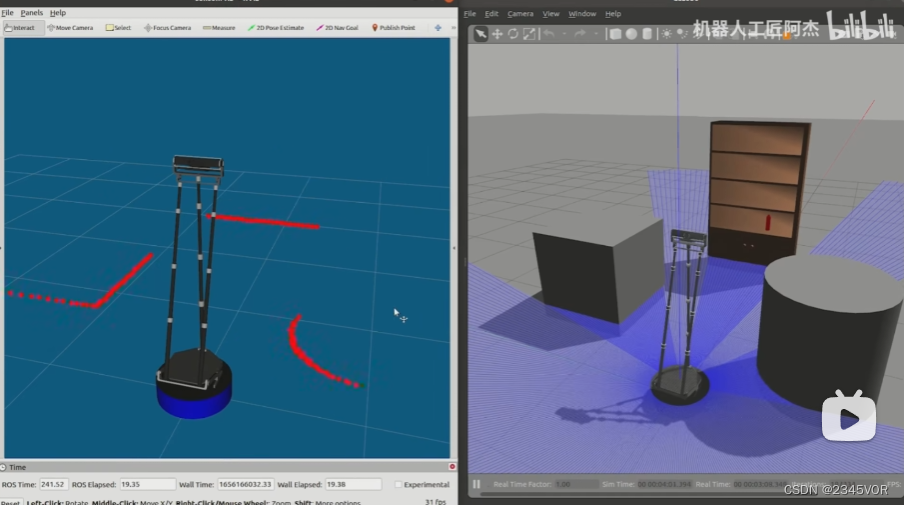
关闭摄像头,保留激光雷达
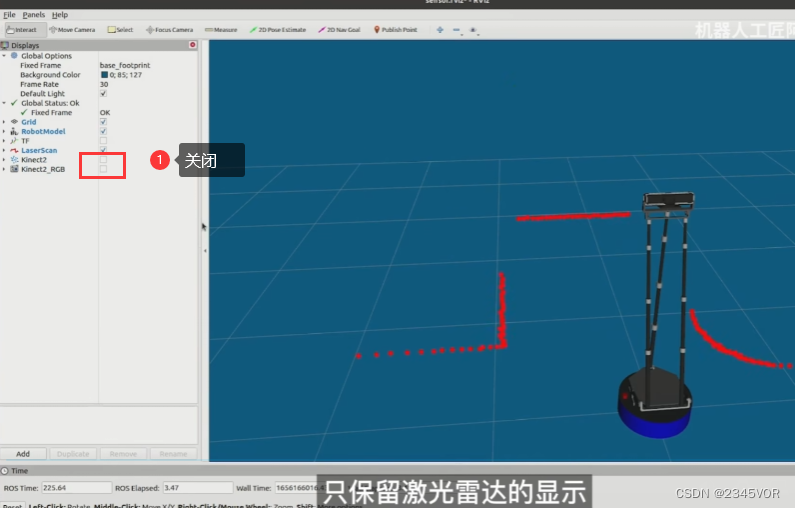
调整视角
5. ROS系统中的激光雷达消息包格式
5.1 运行模板样机
打开三个终端分别运行三条指令
roscore
roslaunch wpr_simulation wpb_simple.launch
roslaunch wpr_simulation wpb_rviz.launch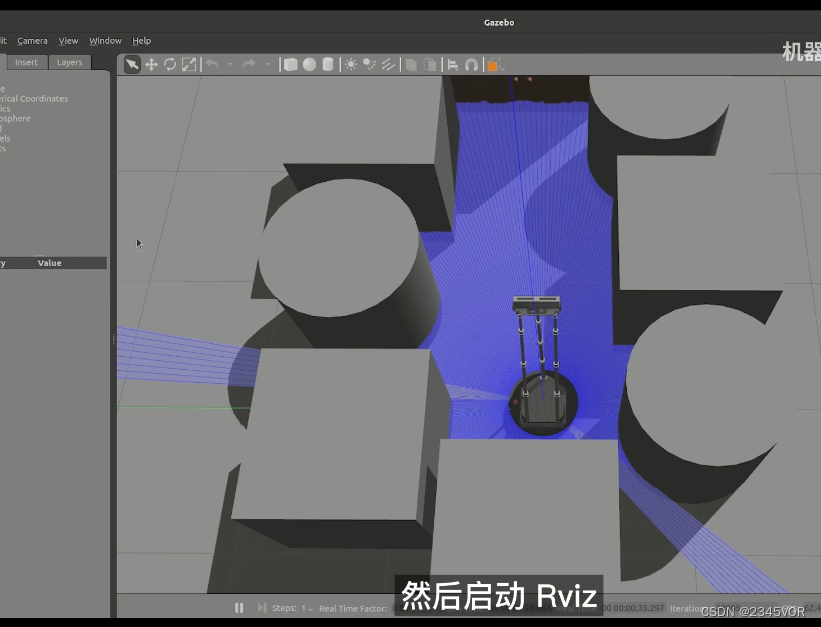
在Gazebo中围绕机器人堆积障碍物
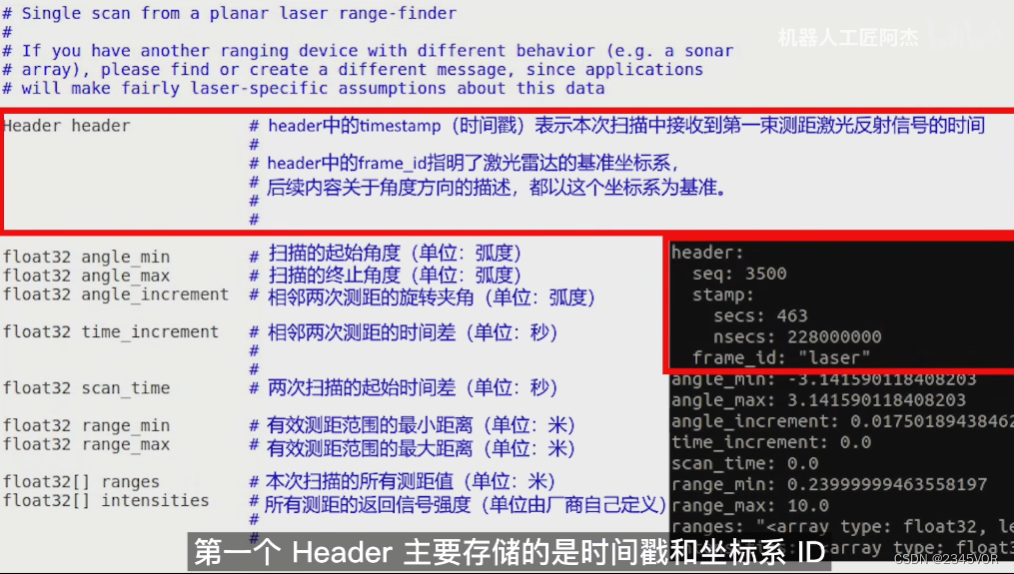
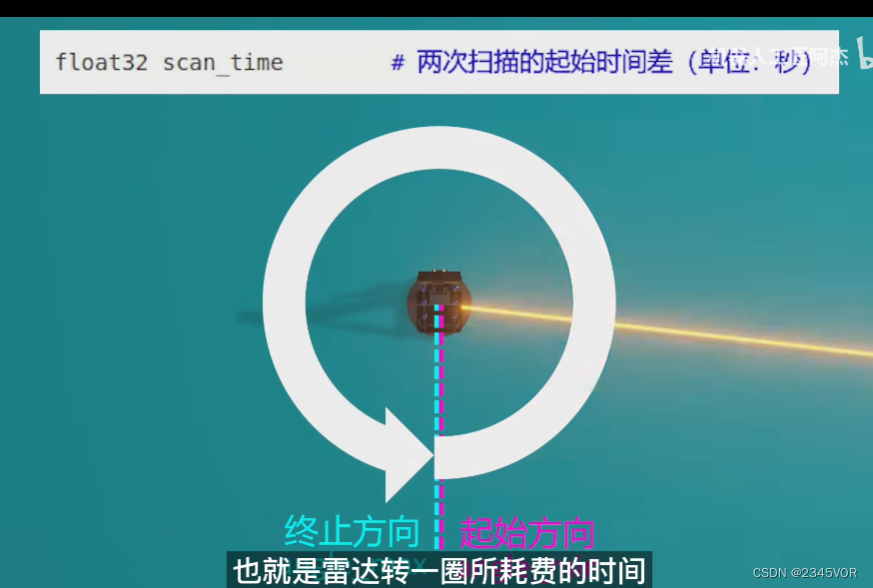
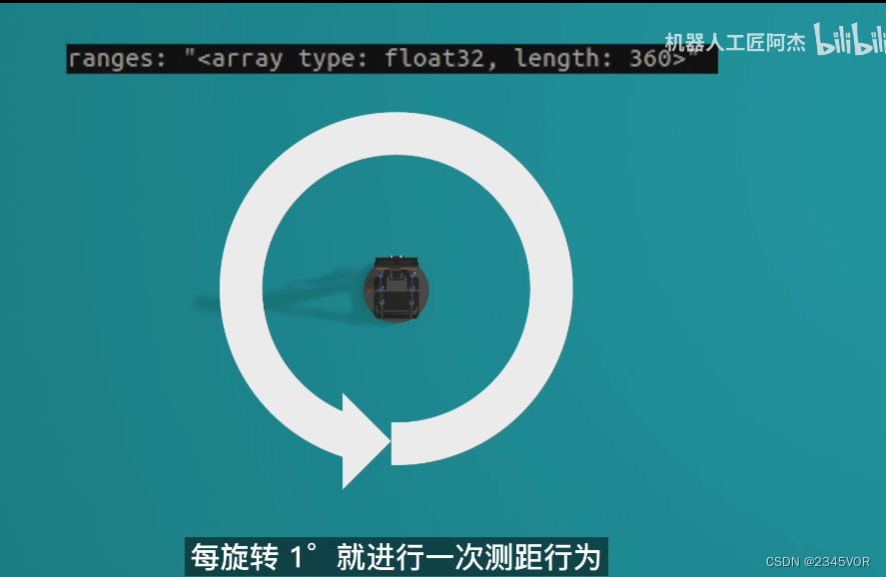
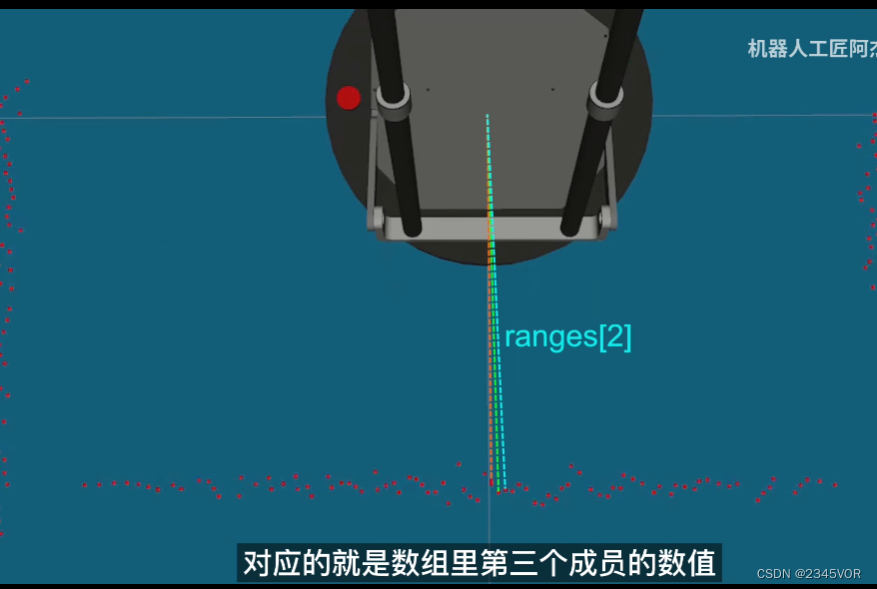
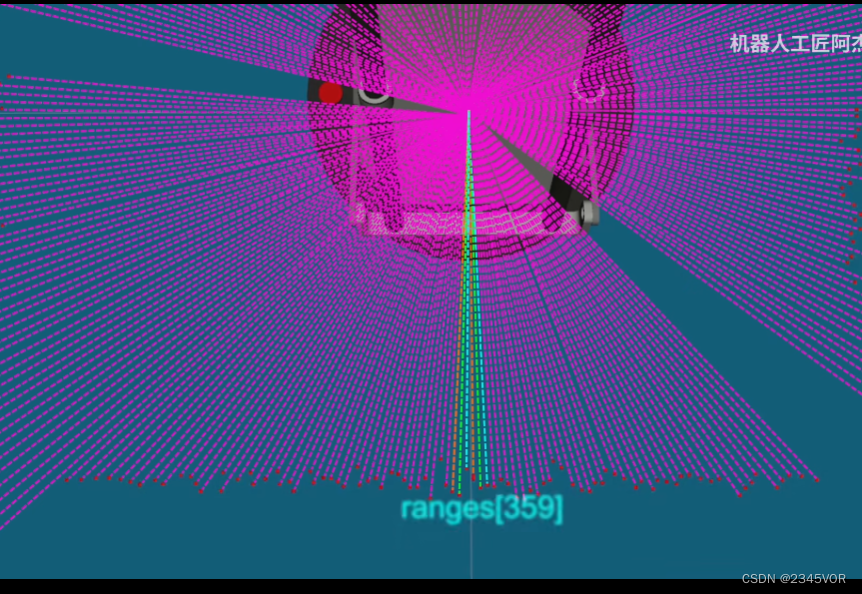
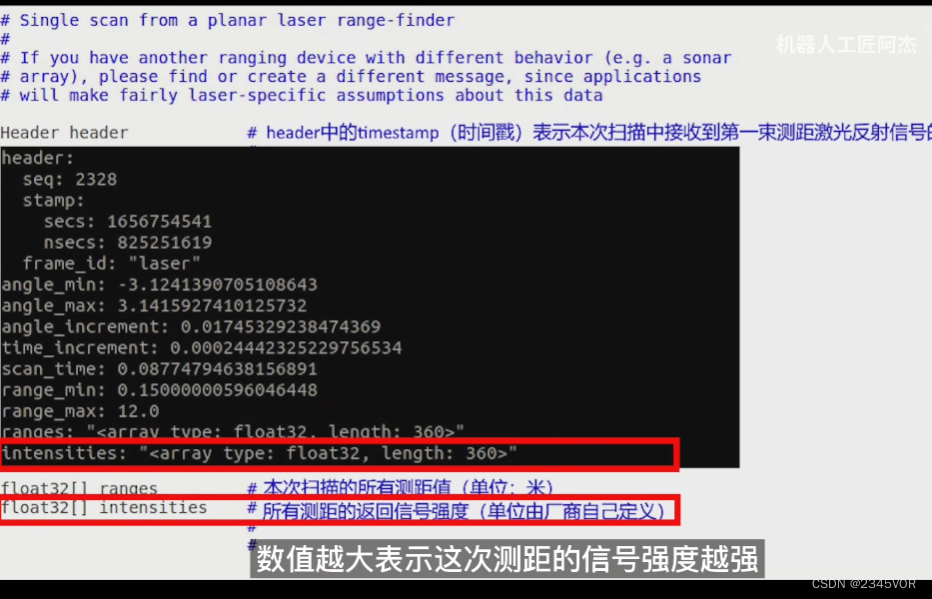
5.2 sensor_msgs中Laserscan_msgs消息属性
进入ROS Index官网搜索sensor_msgs
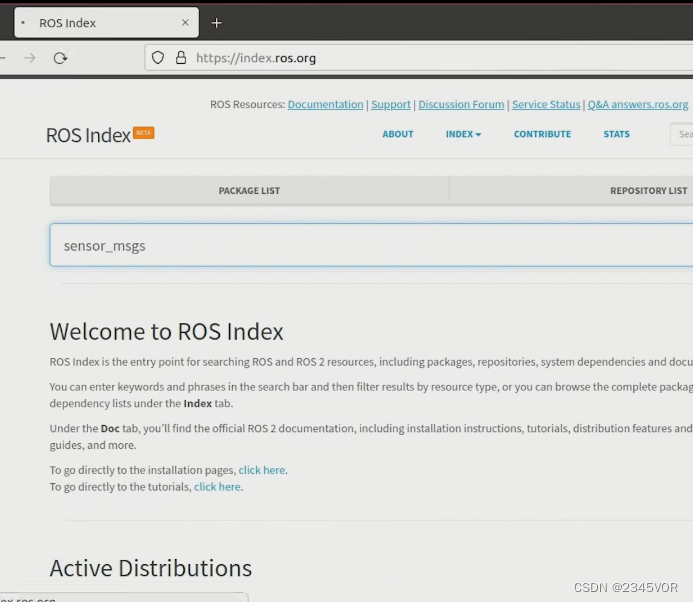

进入website
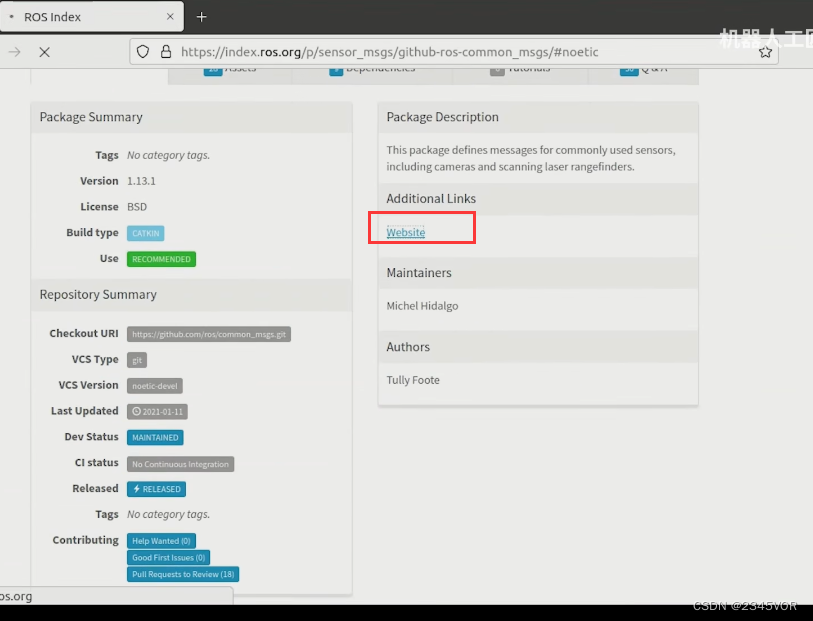
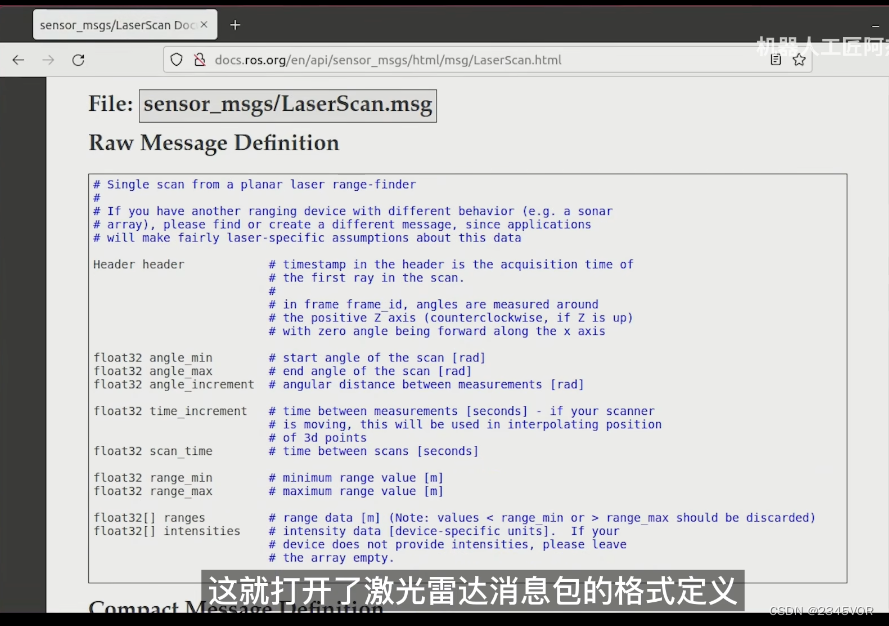
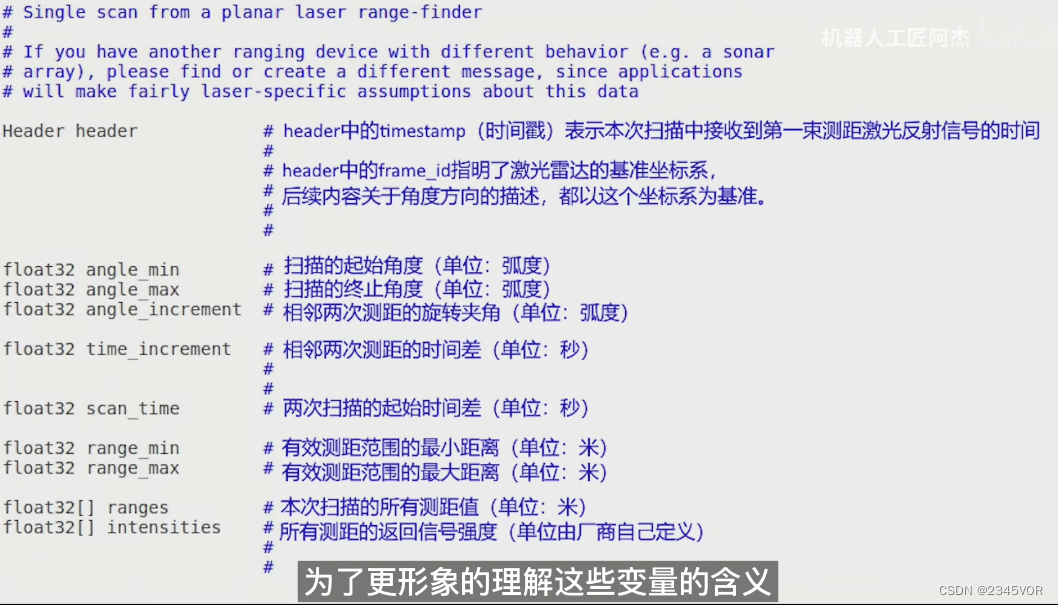
在消息中找到LaserScan
这就打开了激光雷达消息包的格式定义
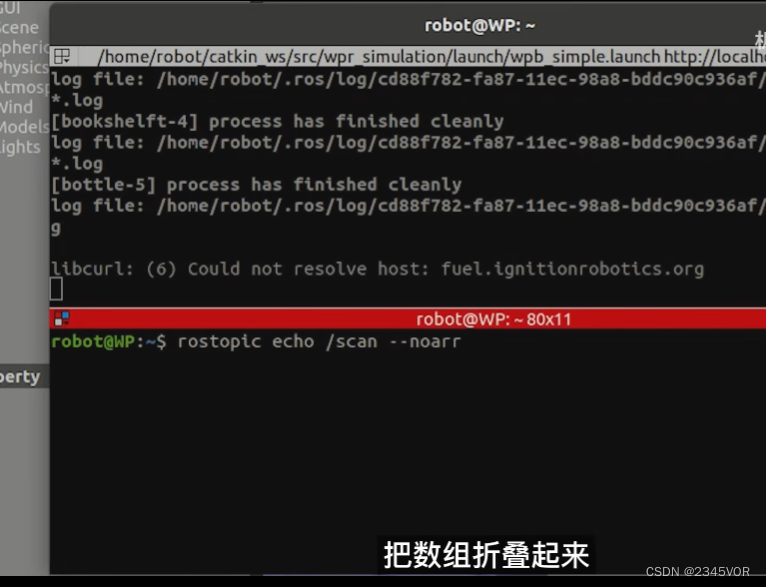
5.3 查看scan消息
新开终端输入
rostopic echo /scan --noarr
显示对比
6. 用C++获取ROS激光雷达数据节点
6.1 运行模板样机
采用wpr_simulation开源工程,打开三个终端分别运行三条指令
roscore
roslaunch wpr_simulation wpb_simple.launch
rosrunwpr_simulation deno_lidar_data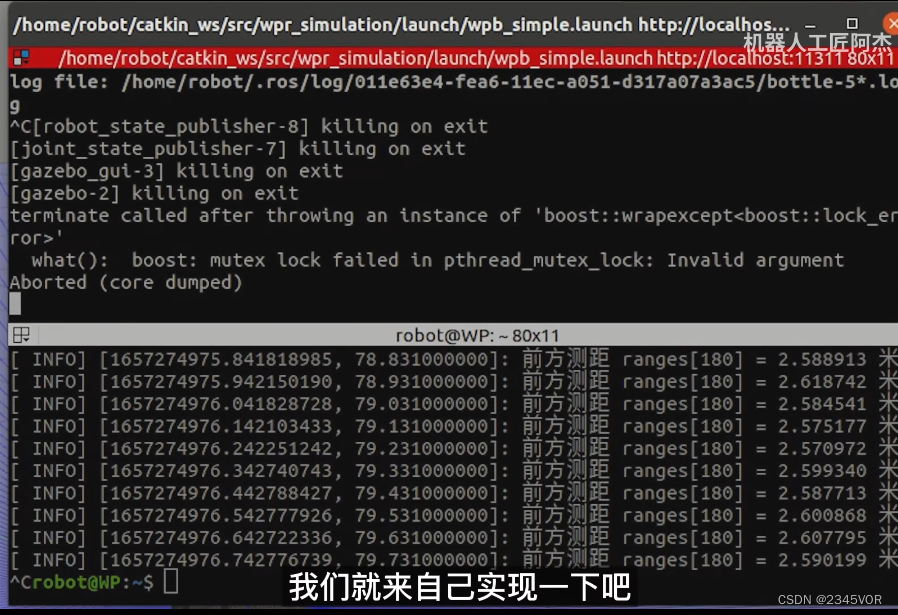
6.2 构思功能的思路和步骤
构思
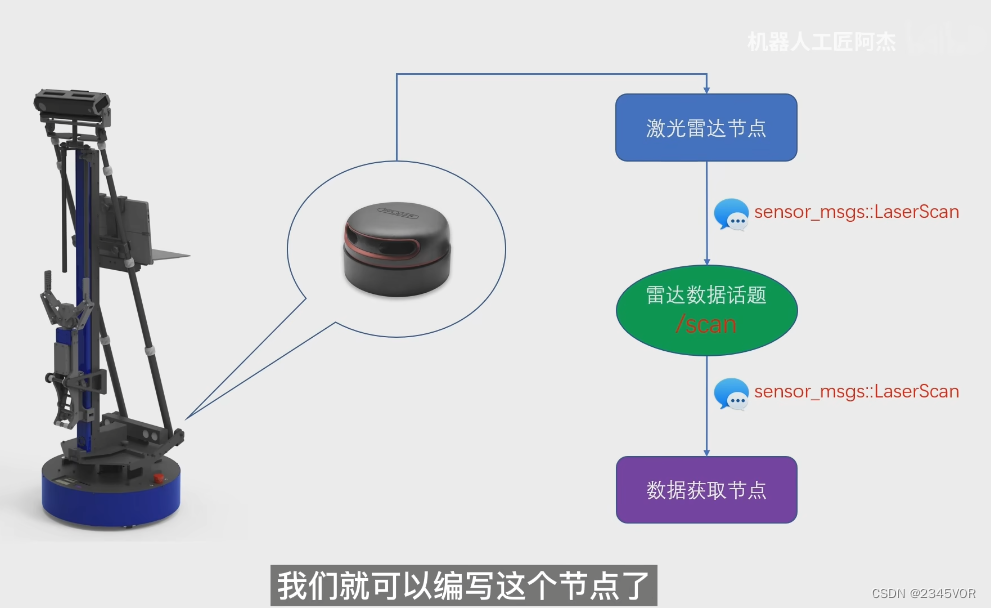
实现步骤
- 构建一个新的软件包,包名叫做lidar_pkg。
- 在软件包中新建一个节点,节点名叫做lidar_node。
- 在节点中,向ROS大管家NodeHandle申请订阅话题/scan,并设置回调函数为LidarCallback()。
- 构建回调函数LidarCallback(),用来接收和处理雷达数据。
- 调用ROS_INFO()显示雷达检测到的前方障碍物距离。
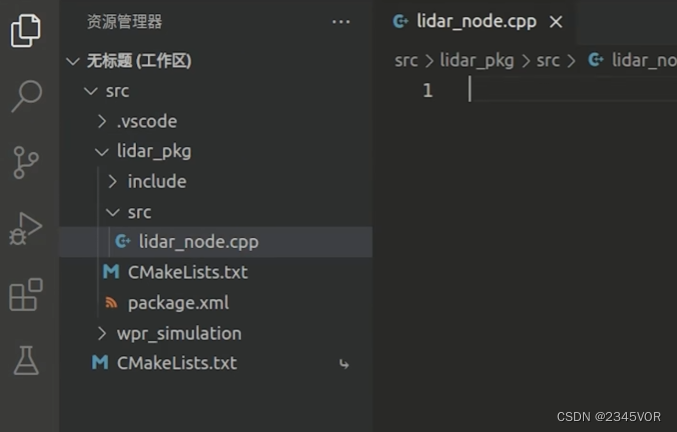
6.3 创建lidar_pkg包
在工作空间src文件创建基于sensor_msgs模板的lidar_pkg
cd ~/catkin_ws/src/
catkin_create_pkg lidar_pkg roscpp rospy sensor_msgs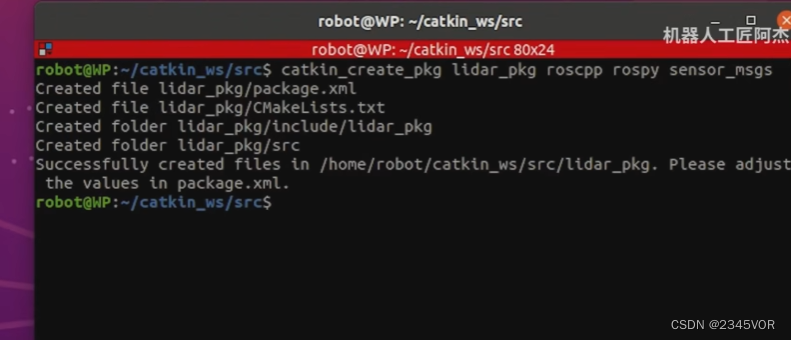
在lidar_pkg文件夹下src中创建lidar_node.cpp
6.4 编写订阅者节点
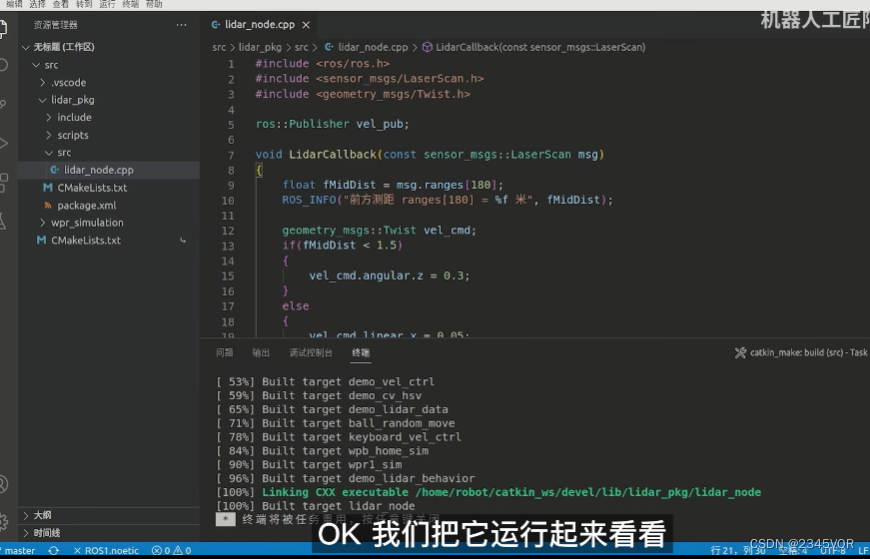
lidar_node源码
#include <ros/ ros.h>
#include <sensor msgs/Laserscan.h>
void Lidarcallback(const sensor_msgs::LaserScan msg)
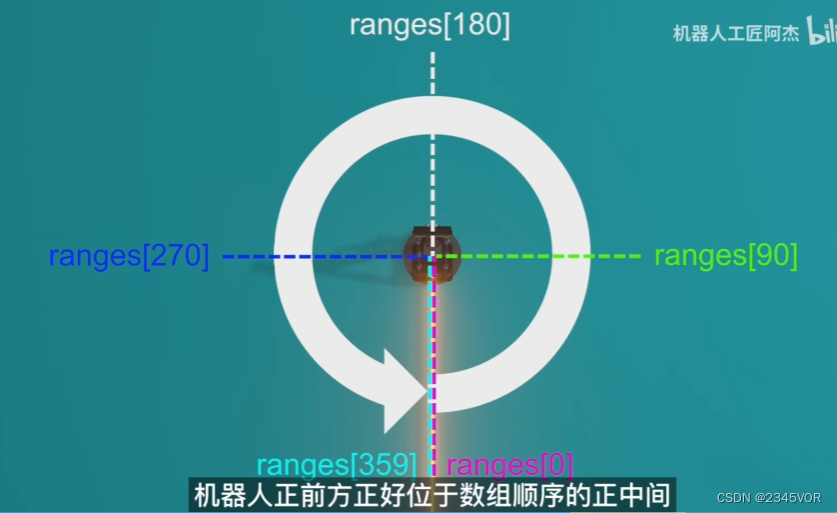
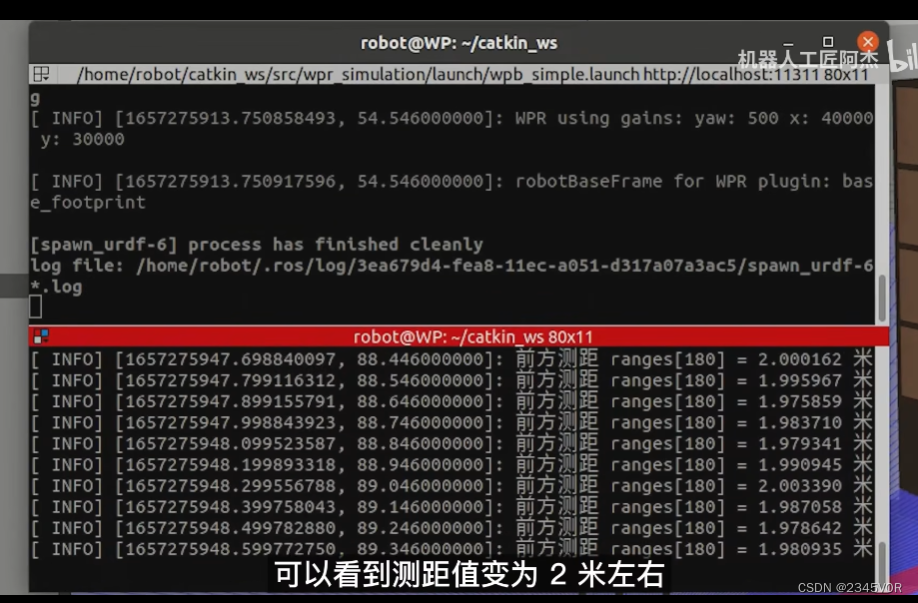
{float fMidDist = msg.ranges[180] ;ROS_INFO("前方测距ranges [180]=%f 米", fMidDist);
}
int main(int argc,char *argv[])
{setlocale(LC_ALL, "" );ros::init(argc, argv,"lidar_node" );ros::NodeHandle n;ros::Subscriber lidar_sub = n.subscribe( " /scan", 10, &LidarCallback);ros::spin();return 0;
}ctrl+s快捷保存
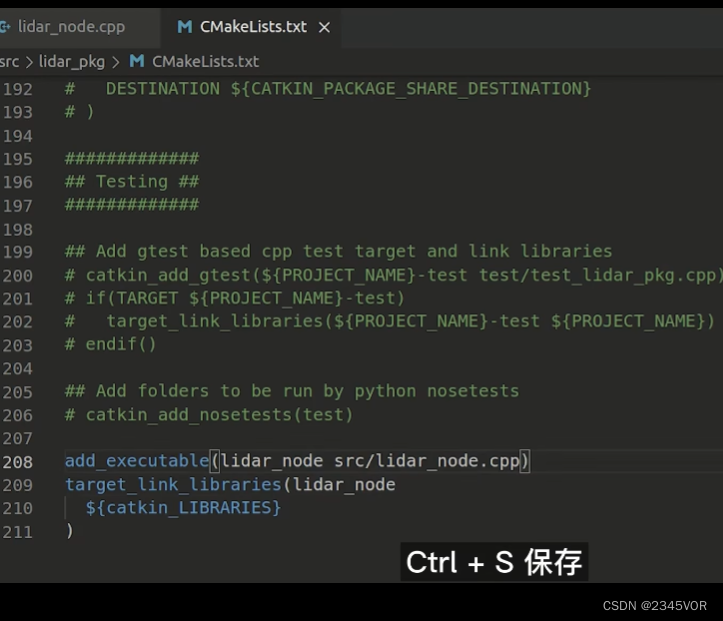
6.5 设置C++编译规则
打开CMake文件
add_executable(lidar_node src/lidar_node.cpp)
target_link_libraries(lidar_node${catkin_LIBRARIES}
)ctrl+s快捷保存
ctrl+shift+b快捷编译
6.6 编译运行lidar_node节点
编译,打开终端
cd ~/catkin_ws/
catkin_make
采用wpr_simulation开源工程,打开三个终端分别运行三条指令
roscore
roslaunch wpr_simulation wpb_simple.launch
rosrun lidar_pkg lidar_node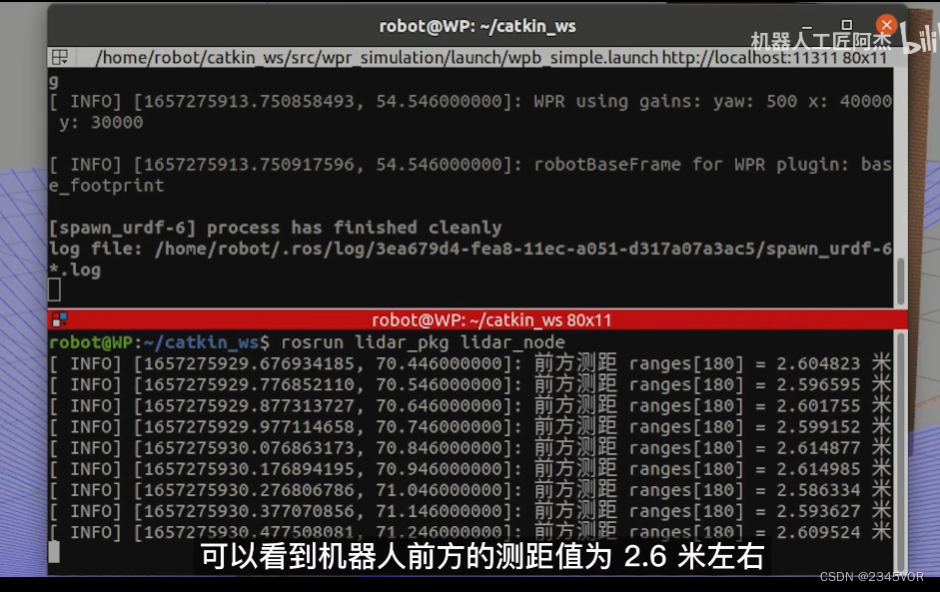
前方距离2.6m,然后在Gazebo中调整书柜,选择移动靠近机器人
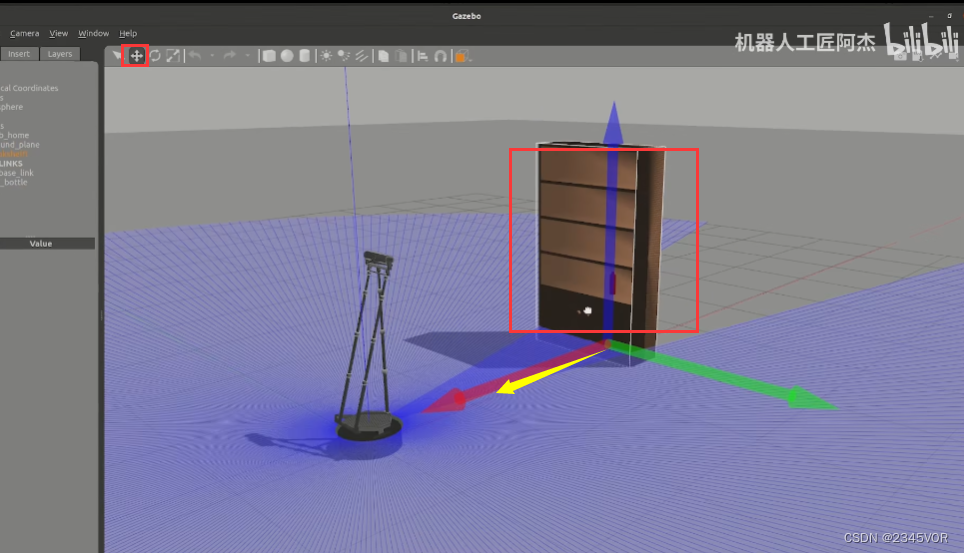
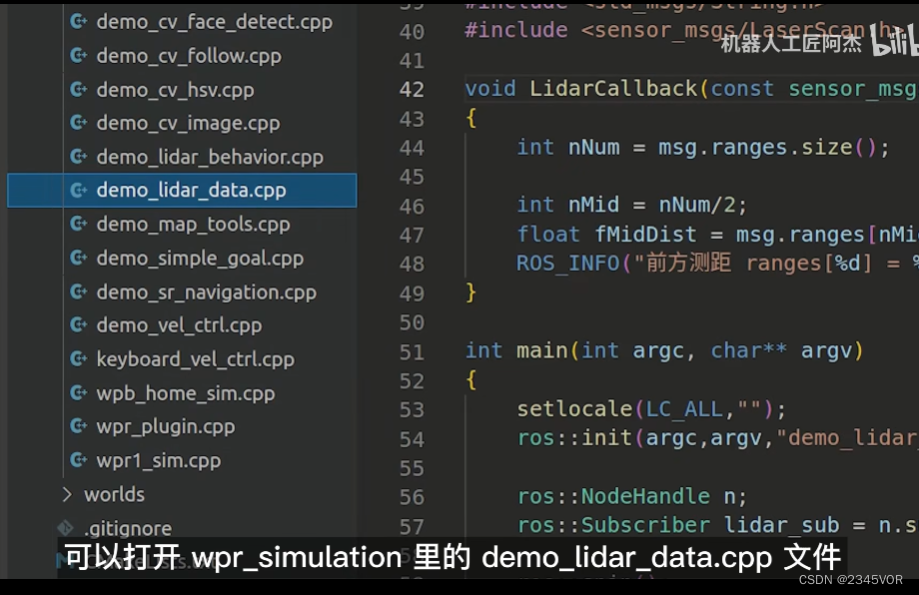
可参照可以打开.wpr_simulation里的demo_lidar_data.cpp文件
7. 用python获取ROS激光雷达数据节点
7.1 运行模板样机
采用wpr_simulation开源工程,打开三个终端分别运行三条指令
roscore
roslaunch wpr_simulation wpb_simple.launch
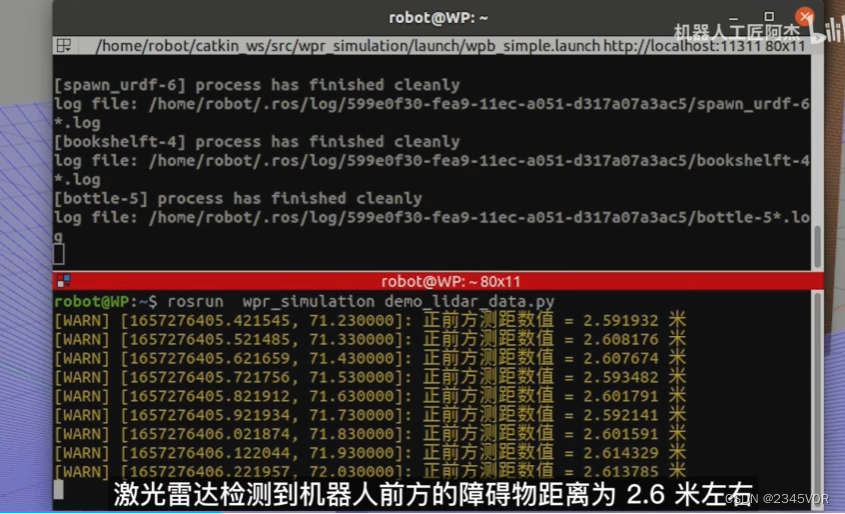
rosrun wpr_simulation deno_lidar_data.py
7.2 构思功能的思路和步骤
构思
实现步骤
- 构建一个新的软件包,包名叫做lidar_pkg。
- 在软件包中新建一个节点,节点名叫做lidar_node.py。
- 在节点中,向ROS大管家rospy申请订阅话题/scan,并设置回调函数为LidarCallback()。
- 构建回调函数LidarCallback(),用来接收和处理雷达数据。
- 调用loginfo()显示雷达检测到的前方障碍物距离。
7.3 创建lidar_pkg包
在工作空间src文件创建基于sensor_msgs模板的lidar_pkg,编译
cd ~/catkin_ws/src/
catkin_create_pkg lidar_pkg roscpp rospy sensor_msgs
cd ..
catkin_make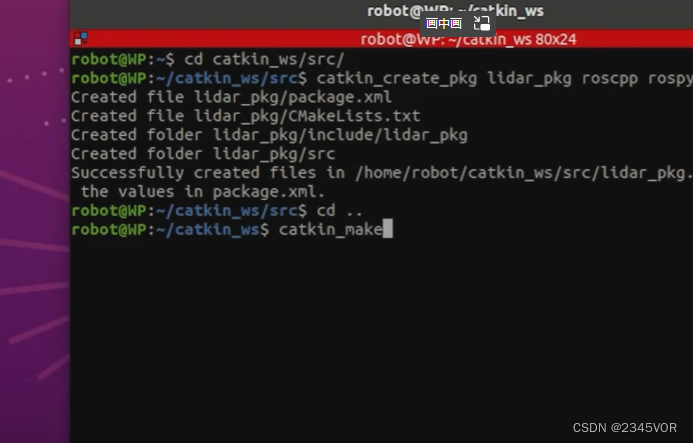
在lidar_pkg文件夹下新建script文件夹中创建lidar_node.py
7.4 编写订阅者节点
先引入python包,设置中文utf-8显示
- ros>=20.04,采用python3
- ros<20.04,采用python
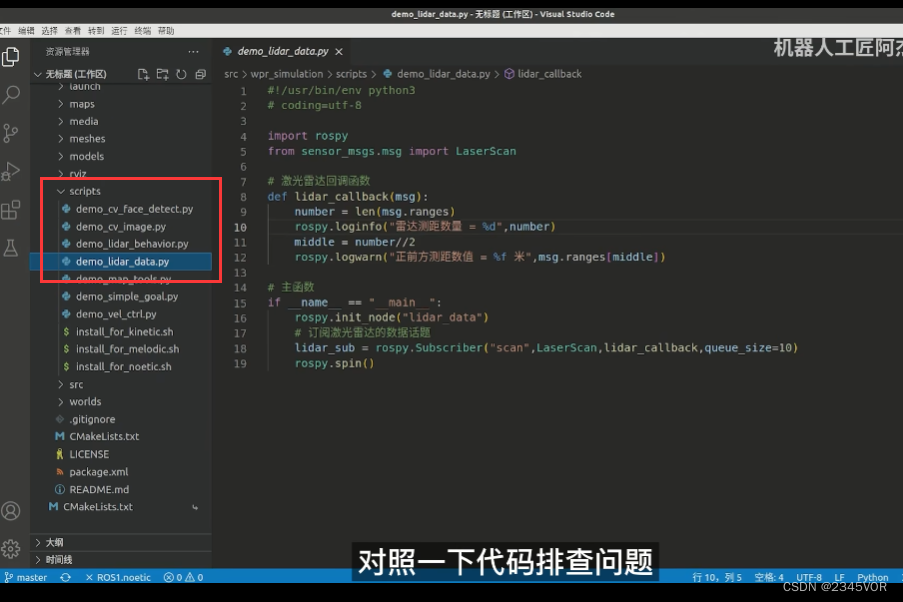
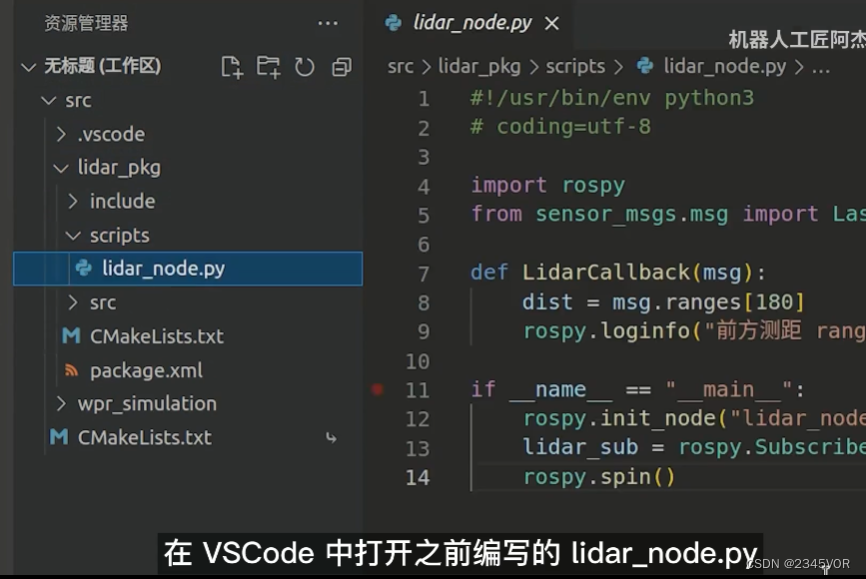
lidar_node.py源码
#!/usr/bin/env python3
#coding=utf-8
import rospy
from sensor_msgs.msg import LaserScan
def Lidarcallback(msg):dist = msg.ranges [ 180]rospy.loginfo("前方测距 ranges [ 180] = %f 米" , dist)
if _name ="_main_":rospy.init_node( "lidar_node" )lidar_sub = rospy.Subscriber( " /scan" ,LaserScan,Lidarcallback,queue_size=10)rospy.spin()ctrl+s快捷保存
7.5 添加可执行的权限
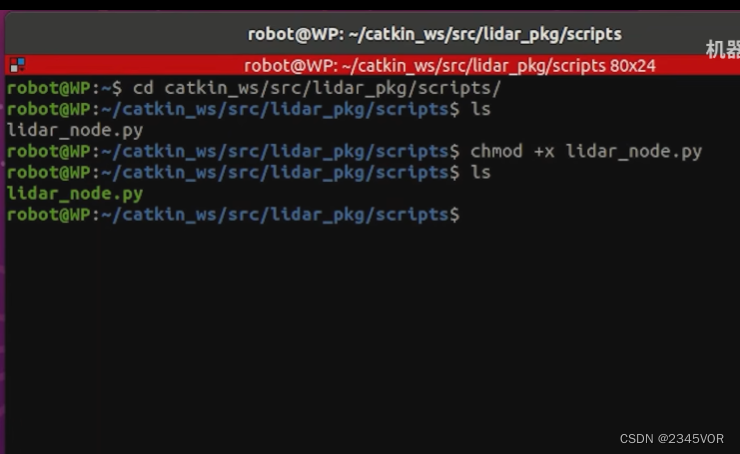
在所在文件夹打开终端
cd catkin_ws/src/lidar_pkg/scripts/
ls
chmod +x lidar_node.py
ls
文件名变成绿色表示权限添加成功
7.6 运行lidar_node节点
采用wpr_simulation开源工程,打开三个终端分别运行三条指令
roscore
roslaunch wpr_simulation wpb_simple.launch
rosrun lidar_pkg lidar_node.py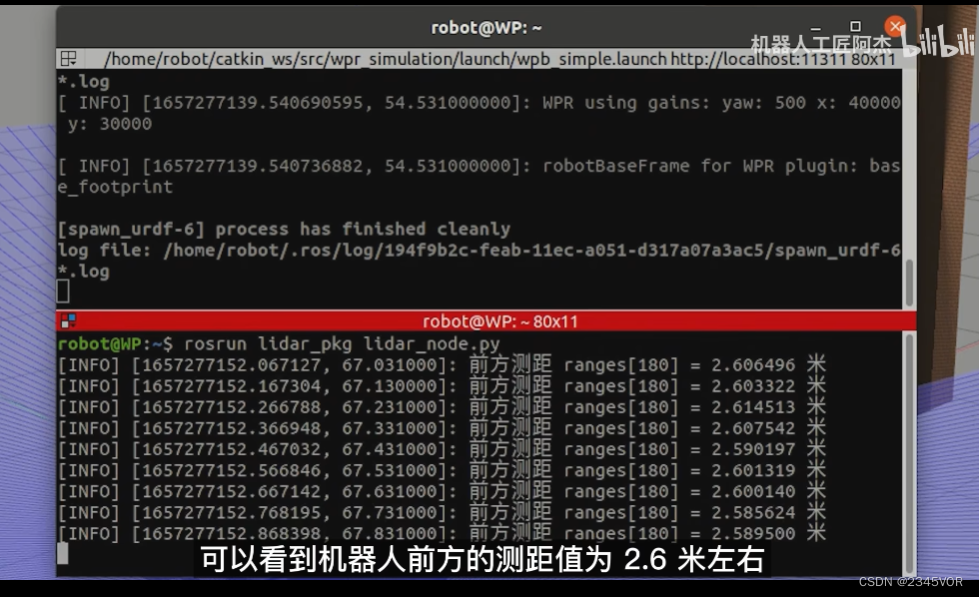
前方距离2.6m,然后在Gazebo中调整书柜,选择移动靠近机器人
可参照可以打开wpr_simulation里的script文件夹中创建lidar_node.py
8. 用C++编写激光雷达避障节点
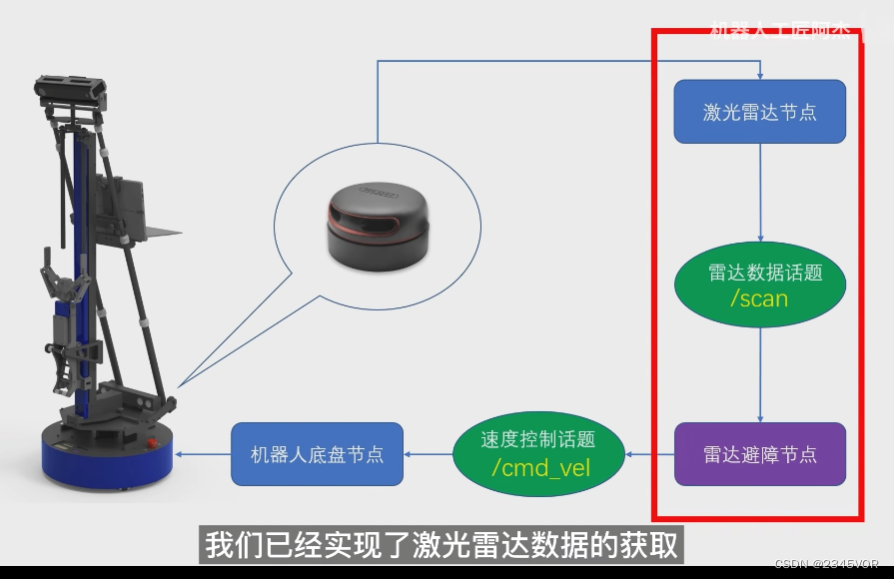
基于前面学习的机器人运动控制和激光雷达数据,下面将联系这两点编写激光雷达避障节点
8.1 构思功能的思路和步骤
- 让大管家NodeHandle 发布速度控制话题/cmd_vel 。
- 构建速度控制消息包vel_cmd。
- 根据激光雷达的测距数值,实时调整机器人运动速度,避开障碍物。
8.2 修改lidar_node.cpp
见6.4源码
修改成如下lidar_node源码
#include <ros/ ros.h>
#include <sensor msgs/Laserscan.h>
#include <geometry msgs/Twist.h>
ros::Publisher vel_pub;void Lidarcallback(const sensor_msgs::LaserScan msg)
{float fMidDist = msg.ranges[180] ;ROS_INFO("前方测距ranges [180]=%f 米", fMidDist);geometry msgs::Twist vel_cmd ;if( fMidDist< 1.5){vel_cmd.angular.z = 0.3;}else{vel_cmd.linear.x = 0.05;}vel_pub.publish(vel_cmd);}
int main(int argc,char *argv[])
{setlocale(LC_ALL, "" );ros::init(argc, argv,"lidar_node" );ros::NodeHandle n;ros::Subscriber lidar_sub = n.subscribe( " /scan", 10, &LidarCallback);ros::spin();return 0;
}ctrl+s快捷保存
ctrl+shift+b快捷编译
8.4 运行lidar_node节点
采用wpr_simulation开源工程,打开三个终端分别运行三条指令
roscore
roslaunch wpr_simulation wpb_simple.launch
rosrun lidar_pkg lidar_node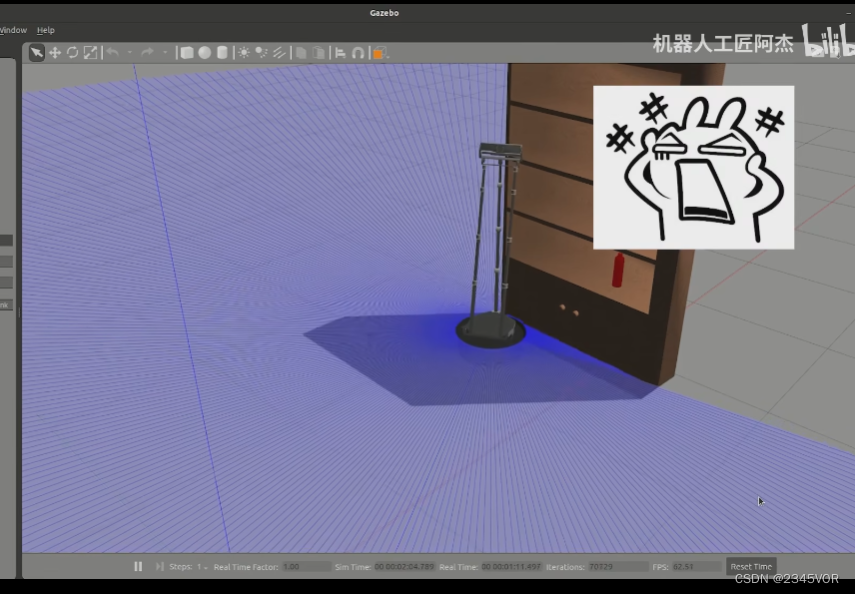
机器人撞到障碍物,机器人有宽度
8.4 优化避障策略
当机器人检测前方障碍物时,最简单把转弯角度调大一点,原地转弯
lidar_node源码
#include <ros/ ros.h>
#include <sensor msgs/Laserscan.h>
#include <geometry msgs/Twist.h>
ros::Publisher vel_pub;
int ncount = 0;void Lidarcallback(const sensor_msgs::LaserScan msg)
{float fMidDist = msg.ranges[180] ;ROS_INFO("前方测距ranges [180]=%f 米", fMidDist);if(ncount > 0){ncount--;return;}geometry msgs::Twist vel_cmd ;if( fMidDist< 1.5){vel_cmd.angular.z = 0.3;ncount = 50;}else{vel_cmd.linear.x = 0.05;}vel_pub.publish(vel_cmd);}
int main(int argc,char *argv[])
{setlocale(LC_ALL, "" );ros::init(argc, argv,"lidar_node" );ros::NodeHandle n;ros::Subscriber lidar_sub = n.subscribe( " /scan", 10, &LidarCallback);ros::spin();return 0;
}ctrl+s快捷保存
ctrl+shift+b快捷编译
然后在调试就OK啦
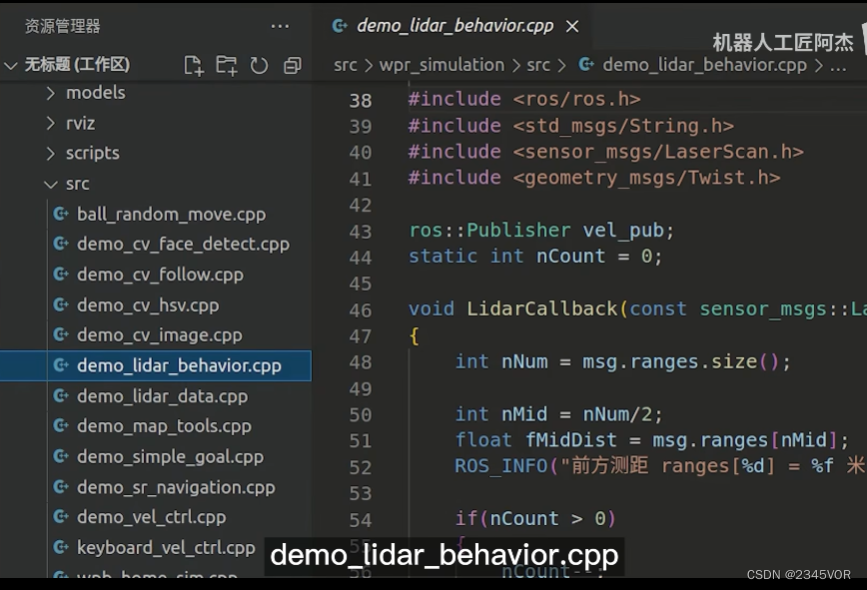
可参照开源项目wpr_simulation下的src文件夹的demo_lidar_behavior.cpp
9. 用python编写激光雷达避障节点
9.1 构思功能的思路和步骤
构思
实现步骤
- 让大管家rospy 发布速度控制话题/cmd_vel 。
- 构建速度控制消息包vel_cmd。
- 根据激光雷达的测距数值,实时调整机器人运动速度,避开障
碍物。
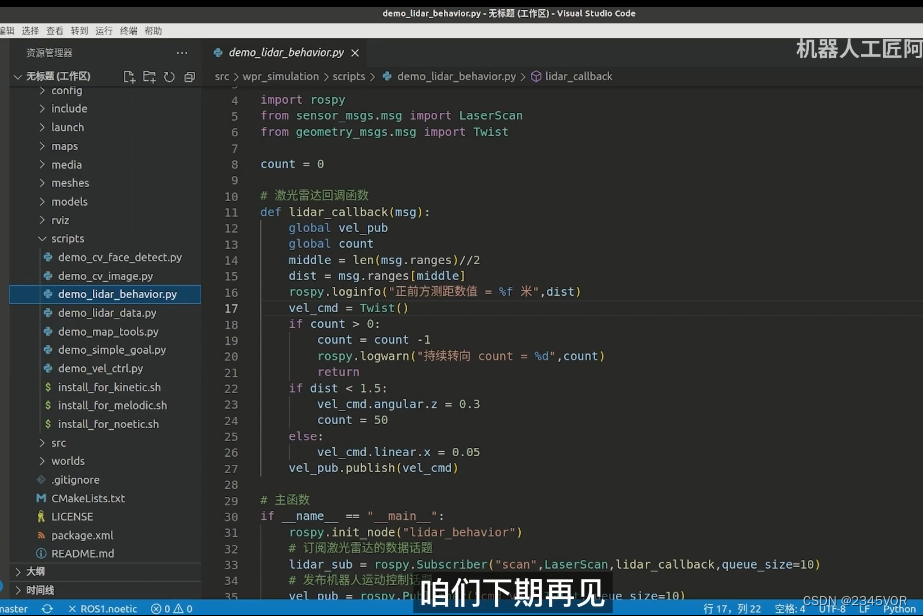
9.2 修改lidar_node.py
打开7.4编写lidar_node.py
lidar_node.py源码
#!/usr/bin/env python3
#coding=utf-8
import rospy
from sensor_msgs.msg import LaserScan
from geometry_msgs.msg import Twistcount =0def Lidarcallback(msg):global vel_pubglobal countdist = msg.ranges [ 180]rospy.loginfo("前方测距 ranges [ 180] = %f 米" , dist)if count > 0:count = count - 1returnvel_cmd = Twist()if dist< 1.5:vel_cmd .angular.z = 0.3else:vel_cmd.linear.x = 0.05vel_pub.publish(vel_cmd)if _name ="_main_":rospy.init_node( "lidar_node" )lidar_sub = rospy.Subscriber( " /scan" ,LaserScan,Lidarcallback,queue_size=10)vel_pub = rospy.Publisher( " /cmd_vel" ,Twist , queue_size=10)rospy.spin()ctrl+s快捷保存
6.6 运行lidar_node节点
采用wpr_simulation开源工程,打开三个终端分别运行三条指令
roscore
roslaunch wpr_simulation wpb_simple.launch
rosrun lidar_pkg lidar_node.py
可参照可以打开wpr_simulation里的script文件夹中demo_lidar_behavior.py
10. 总结
本节学习了ROS机器人的激光雷达原理和数据查看,尝试C++和python两种语言编写,并且结合前面的机器人运动编写了避障节点,接下来会介绍机器人的IMU传感器的操作。🎉🎉🎉