转载:http://blog.sina.com.cn/s/blog_8c388a3a0101dd15.html
〇.各种坐标系及其存在的原因:
要谈坐标系变换,那么坐标系有哪些呢?依次有:物体坐标系,世界坐标系,相机坐标系,投影坐标系以及屏幕坐标系.我要讨论的就是这些坐标系间的转换。
这些坐标系不是凭空而来,他们都是为了完成计算机3D图形学最最最基本的目标而出现.计算机3D图形学最最最基本的目标就是:将构建好的3D物体显示在2D屏幕坐标上.初看好像就是将最初的物体坐标系转换到屏幕坐标系就可以了呀,为什么多出了世界坐标系,相机坐标系,投影坐标系。这是因为:在一个大世界里有多个物体,而每个物体都有自己的坐标系,如何表述这些物体间相对的关系,这就多出了世界坐标系;如果只需要看到这个世界其中一部分,这就多出了相机坐标系;至于投影坐标系那是因为直接将3D坐标转换为屏幕坐标是非常复杂的(因为它们不仅维度不同,度量不同(屏幕坐标一般都是像素为单位,3D空间中我们可以现实世界的米,厘米为单位),XY的方向也不同,在2D空间时还要进行坐标系变换),所以先将3D坐标降维到2D坐标,然后2D坐标转换到屏幕坐标。
对于整个“如何将3D物体投射并显示在2D屏幕上”这一过程而言,坐标系转换的顺序为:
物体坐标系—>世界坐标系—>相机坐标系—>投影坐标系—>图像(像素)坐标系编号设为a. b. c. d. e
当然,本篇的目的是说明如何将3D物体投射并显示在2D屏幕上,且难点也在于此(即b,c,d,e过程)。a到b的过程不在本文讨论之内,不再赘述。如果很在意知识结构的完整性,请参考
http://www.cnblogs.com/shanhaobo/articles/1065380.html
该篇a.b过程十分详细。
一.3D-2D投影基础:图像的投影几何:
如何将空间中的点投射到2维图像中?这是一个问题。
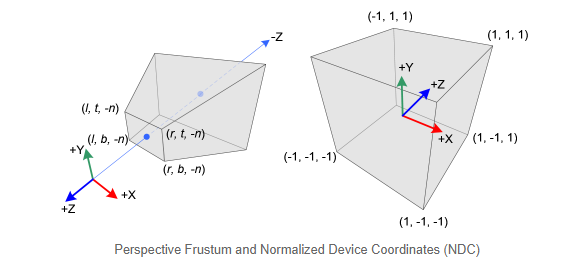
假设空间中的一个点的坐标是(X0, Y0, Z0) (这个坐标称作“相机坐标系”(camera coordinate system)),相对应的2D投影点坐标(此处是“投影坐标系”(projection coordinate) 。如果要进行成像等操作,还要将投影变换到图像坐标(image coordinate)上, 这些都在后面给出)
不用捉急,请看下图 (第一,第四幅图的Z和Y标反了):
其中,轴Z为光轴(optical axis);这个横截面Z=f被叫做图像平面(image plane)或投影平面(projection plane),与Z轴交点为图像位置(image position),该点被称为主点(principal point)(这两个个概念很重要,会影响到投影坐标系到图像坐标系的转换);原点称为投射中心(center of the projection)。如下图:
二.世界坐标系与相机坐标系(含转化问题):
1、世界坐标系向相机坐标系映射流程:
2、具体操作
A.相机外部参数(Camera extrinsic (or external) parameters)
然后,有:
其中Cw就是图中的C,是相机中心在世界坐标中的3D点的坐标。R就是Rc<—w所以,从世界坐标到相机坐标的转换就是4X4的平移矩阵与4X4的旋转矩阵的乘积,如下式:
旋转矩阵R和平移向量Cw便被称为相机的外部参数,也即相机在世界坐标中的朝向与位置(orientation and position)。
B.投影矩阵: 三维到二维(Projection Matrix: 3D to 2D)
接下来,我们需要将相机坐标投影到图像平面(Z=f, image plane)。在第一部分中,本文给出了如何将相机坐标中的3D点投影到2D的过程,即(1)式:
将(x,y)写成齐次坐标的形式,有:
知,如果Z不为0,有:
因而,我们能够将从3D点(X,Y,Z)(这个点是在相机坐标系中的)到2D投影点(x,y)的投影过程用3X4的矩阵描述成 (4)式:
而此3X4的矩阵便为投影矩阵。关于此矩阵仍有一些讨论,比如Z是0和不0,无穷有穷,是不是原点什么的,因为过于理论,对于搞工程的亲们,洒家就不再赘述了。
这一部分不太容易理解。不急,慢慢来。
通常,通过之前的步骤,我们已经能够将3D点投影到2D图像平面 (image plane,也叫投影平面, projection plane) 上了。但是,这并不够。因为,这样一个在投影平面上的图像是在投影坐标系下的,它的单位还是物理单位,位置也是物理位置。比如其单位可能是米,厘米,毫米等。因而,下一步,我们需要将投影坐标系转换至图像(也叫像素,pixel)坐标系。需要从其真实的物理位置(physical positions)转换至像素位置(pixel positions)。这就需要有放缩(scaling)与平移(translation)操作。
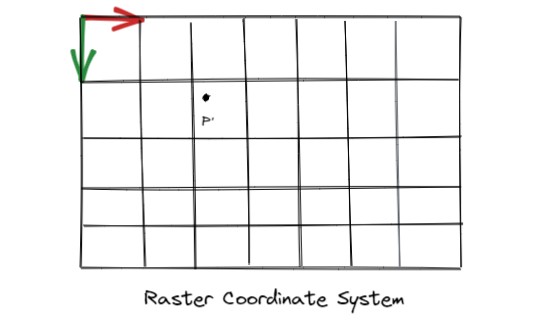
假设,图像物理单位是mm(毫米)。放缩的目的是要确定一个mm中究竟有几个像素(因为通常情况下,一个mm并不精确对应1个像素);平移的目的是将图像原点移动到左下角(即通常情况下,图像左下角为(0,0)点,而投影坐标系中,图像是不满足这个要求的)。
对于放缩操作,有下式:
其中,mx表示x方向上,一单位(此处我们假设是1mm)中所含有像素个数;同理,my是y方向上的。需要注意的是,尽管mx与my数值上通常非常接近,但一般并不严格相等。
对于平移操作,我们需要知道主点(在第一部分中有介绍)的物理位置,这个位置通常是固定的。举个例子,显示的图像(在图像坐标系中)必然是在显示在显示屏幕上的,而屏幕则是由像素构成。则主点的位置(也即图像位置,在第一部分有说明)便是在这个物理屏幕的中心。如果屏幕包含1536行X2048列像素,则主点位置在(767.5, 1023.5)处。而我们的目的,就是将这个放缩好了的图像平移,使这个主点(也即目前的图像中心)移动至当前图像右上角处;而当前图像左下角移动至现在的主点位置,因而,当前的主点位置(767.5,1023.5)平移后便是(0,0)。这一段话够费解。我们再解释一二,后面跟张图,就清楚了。
在图像坐标系中,我们假定主点的位置是(px,py),这个理论上就是上段中的(767.5, 1023.5),当然,他们之前可能会有细微的不用,比如像素不可能不是整数。因而要获得投影点(x,y)的像素坐标,我们需要在原来的投影矩阵中加入平移量:
请看下图:
我觉得这张图已经相当清楚了。不在赘述。
而对于(6)式左侧的放缩平移矩阵,我们应当明白,这是相当理想的情况。理想状况自然就是不靠谱的情况,所以,我们还需要加入其它的参数s,这个参数叫偏度参数(skew parameter),控制了一定的错切(shear)变换因而原来的矩阵变为:
通常,我们给予左侧3X3的部分一个特殊的名字,
这个东西,便是千呼万唤始出来的相机内部参数了。
三.世界坐标系到图像坐标系的综合。
K一般是给好的。所以在实际编程中,不被过分在意。
至此。便讨论清楚了。
如果仍有疑问或其他需求,请自行查阅网站:
http://www.cim.mcgill.ca/~langer
里面都是瑰宝。是加拿大麦吉尔大学(加拿大最nb的大学)教授的页面,里面很多内容。讲解详细清楚。
很多网上的中文资料实在是令人遗憾。不是驴唇不对马嘴,就是简略抽象晦涩难懂。作为小白,为小白们服务义不容辞。
改变这个状况。