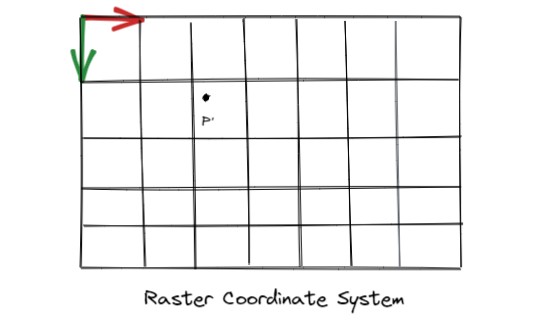
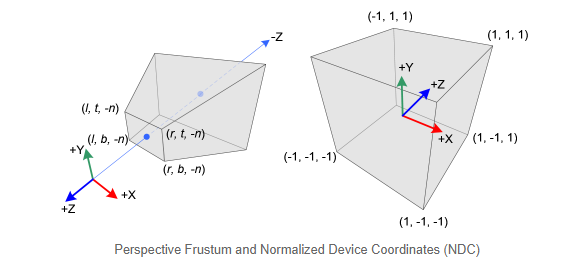
对于常规相机,SLAM里使用针孔相机模型

简而言之,一个空间点[x,y,z]和它在图像中的像素坐标[u,v,d] (d
指深度数据) 的对应关系是这样的:
u = x ⋅ f x z + c x , u=x⋅f_xz+cx, u=x⋅fxz+cx,
v = y ⋅ f y z + c y , v=y⋅f_yz+cy, v=y⋅fyz+cy,
d = z ⋅ s , d=z⋅s, d=z⋅s,
其中,fx,fy指相机在x,y两个轴上的焦距,cx,cy指相机的光圈中心,s指深度图的缩放因子。
这个公式是从(x,y,z)推到(u,v,d)的。反之,我们也可以把它写成已知(u,v,d),推导(x,y,z)的方式。请读者自己推导一下。
不,还是我们来推导吧……公式是这样的:
z = d / s z=d/s z=d/s
x = ( u − c x ) ⋅ z / f x , x=(u−cx)⋅z/f_x , x=(u−cx)⋅z/fx,
y = ( v − c y ) ⋅ z / f y y=(v−cy)⋅z/f_y y=(v−cy)⋅z/fy
怎么样,是不是很简单呢?事实上根据这个公式就可以构建点云啦。
通常,我们会把fx,fy,cx,cy这四个参数定义为相机的内参矩阵C,也就是相机做好之后就不会变的参数。相机的内参可以用很多方法来标定,详细的步骤比较繁琐,我们这里就不提了。给定内参之后呢,每个点的空间位置与像素坐标就可以用简单的矩阵模型来描述了:

和t是相机的姿态。R代表旋转矩阵,t代表位移矢量。因为我们现在做的是单幅点云,认为相机没有旋转和平移。所以,把R设成单位矩阵I,把t设成了零。s是scaling factor,即深度图里给的数据与实际距离的比例。由于深度图给的都是short (mm单位),s通常为1000。
ransac
在这里复述下RANSAC的检测流程,详细的过程见上一篇翻译文章:
RANSAC算法的输入是一组观测数据,一个可以解释或者适应于观测数据的参数化模型,一些可信的参数。
RANSAC通过反复选择数据中的一组随机子集来达成目标。被选取的子集被假设为局内点,并用下述方法进行验证:
1.有一个模型?适应于假设的局内点,即所有的未知参数?都能从假设的局内点计算得出。
2.用1中得到的模型去测试所有的其它数据,如果某个点适用于估计的模型,认为它也是局内点。
3.如果有足够多的点被归类为假设的局内点,那么估计的模型?就足够合理。
4.然后,用所有假设的局内点去重新估计模型,?因为它仅仅被初始的假设局内点估计过。
5.最后,通过估计局内点与模型的错误率来评估模型?。
这个过程被重复执行固定的次数?,每次产生的模型要么因为局内点太少而被舍弃,要么因为比现有的模型更好而被选用。