1-标定源码(Opencv自带)
采用OPENCV自带相机相机标定源代码(棋盘法)
#include "opencv2/core.hpp"
#include <opencv2/core/utility.hpp>
#include "opencv2/imgproc.hpp"
#include "opencv2/calib3d.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/videoio.hpp"
#include "opencv2/highgui.hpp"#include <cctype>
#include <stdio.h>
#include <string.h>
#include <time.h>
#include <iostream>
#pragma warning( disable : 4996 )using namespace cv;
using namespace std;const char* usage =
" \nexample command line for calibration from a live feed.\n"
" calibration -w=4 -h=5 -s=0.025 -o=camera.yml -op -oe\n"
" \n"
" example command line for calibration from a list of stored images:\n"
" imagelist_creator image_list.xml *.png\n"
" calibration -w=4 -h=5 -s=0.025 -o=camera.yml -op -oe image_list.xml\n"
" where image_list.xml is the standard OpenCV XML/YAML\n"
" use imagelist_creator to create the xml or yaml list\n"
" file consisting of the list of strings, e.g.:\n"
" \n"
"<?xml version=\"1.0\"?>\n"
"<opencv_storage>\n"
"<images>\n"
"view000.png\n"
"view001.png\n"
"<!-- view002.png -->\n"
"view003.png\n"
"view010.png\n"
"one_extra_view.jpg\n"
"</images>\n"
"</opencv_storage>\n";const char* liveCaptureHelp =
"When the live video from camera is used as input, the following hot-keys may be used:\n"
" <ESC>, 'q' - quit the program\n"
" 'g' - start capturing images\n"
" 'u' - switch undistortion on/off\n";static void help(char** argv)
{printf("This is a camera calibration sample.\n""Usage: %s\n"" -w=<board_width> # the number of inner corners per one of board dimension\n"" -h=<board_height> # the number of inner corners per another board dimension\n"" [-pt=<pattern>] # the type of pattern: chessboard or circles' grid\n"" [-n=<number_of_frames>] # the number of frames to use for calibration\n"" # (if not specified, it will be set to the number\n"" # of board views actually available)\n"" [-d=<delay>] # a minimum delay in ms between subsequent attempts to capture a next view\n"" # (used only for video capturing)\n"" [-s=<squareSize>] # square size in some user-defined units (1 by default)\n"" [-o=<out_camera_params>] # the output filename for intrinsic [and extrinsic] parameters\n"" [-op] # write detected feature points\n"" [-oe] # write extrinsic parameters\n"" [-oo] # write refined 3D object points\n"" [-zt] # assume zero tangential distortion\n"" [-a=<aspectRatio>] # fix aspect ratio (fx/fy)\n"" [-p] # fix the principal point at the center\n"" [-v] # flip the captured images around the horizontal axis\n"" [-V] # use a video file, and not an image list, uses\n"" # [input_data] string for the video file name\n"" [-su] # show undistorted images after calibration\n"" [-ws=<number_of_pixel>] # Half of search window for cornerSubPix (11 by default)\n"" [-dt=<distance>] # actual distance between top-left and top-right corners of\n"" # the calibration grid. If this parameter is specified, a more\n"" # accurate calibration method will be used which may be better\n"" # with inaccurate, roughly planar target.\n"" [input_data] # input data, one of the following:\n"" # - text file with a list of the images of the board\n"" # the text file can be generated with imagelist_creator\n"" # - name of video file with a video of the board\n"" # if input_data not specified, a live view from the camera is used\n""\n", argv[0]);printf("\n%s", usage);printf("\n%s", liveCaptureHelp);
}enum { DETECTION = 0, CAPTURING = 1, CALIBRATED = 2 };
enum Pattern { CHESSBOARD, CIRCLES_GRID, ASYMMETRIC_CIRCLES_GRID };static double computeReprojectionErrors(const vector<vector<Point3f> >& objectPoints,const vector<vector<Point2f> >& imagePoints,const vector<Mat>& rvecs, const vector<Mat>& tvecs,const Mat& cameraMatrix, const Mat& distCoeffs,vector<float>& perViewErrors)
{vector<Point2f> imagePoints2;int i, totalPoints = 0;double totalErr = 0, err;perViewErrors.resize(objectPoints.size());for (i = 0; i < (int)objectPoints.size(); i++){projectPoints(Mat(objectPoints[i]), rvecs[i], tvecs[i],cameraMatrix, distCoeffs, imagePoints2);err = norm(Mat(imagePoints[i]), Mat(imagePoints2), NORM_L2);int n = (int)objectPoints[i].size();perViewErrors[i] = (float)std::sqrt(err * err / n);totalErr += err * err;totalPoints += n;}return std::sqrt(totalErr / totalPoints);
}static void calcChessboardCorners(Size boardSize, float squareSize, vector<Point3f>& corners, Pattern patternType = CHESSBOARD)
{corners.resize(0);switch (patternType){case CHESSBOARD:case CIRCLES_GRID:for (int i = 0; i < boardSize.height; i++)for (int j = 0; j < boardSize.width; j++)corners.push_back(Point3f(float(j * squareSize),float(i * squareSize), 0));break;case ASYMMETRIC_CIRCLES_GRID:for (int i = 0; i < boardSize.height; i++)for (int j = 0; j < boardSize.width; j++)corners.push_back(Point3f(float((2 * j + i % 2) * squareSize),float(i * squareSize), 0));break;default:CV_Error(Error::StsBadArg, "Unknown pattern type\n");}
}static bool runCalibration(vector<vector<Point2f> > imagePoints,Size imageSize, Size boardSize, Pattern patternType,float squareSize, float aspectRatio,float grid_width, bool release_object,int flags, Mat& cameraMatrix, Mat& distCoeffs,vector<Mat>& rvecs, vector<Mat>& tvecs,vector<float>& reprojErrs,vector<Point3f>& newObjPoints,double& totalAvgErr)
{cameraMatrix = Mat::eye(3, 3, CV_64F);if (flags & CALIB_FIX_ASPECT_RATIO)cameraMatrix.at<double>(0, 0) = aspectRatio;distCoeffs = Mat::zeros(8, 1, CV_64F);vector<vector<Point3f> > objectPoints(1);calcChessboardCorners(boardSize, squareSize, objectPoints[0], patternType);objectPoints[0][boardSize.width - 1].x = objectPoints[0][0].x + grid_width;newObjPoints = objectPoints[0];objectPoints.resize(imagePoints.size(), objectPoints[0]);double rms;int iFixedPoint = -1;if (release_object)iFixedPoint = boardSize.width - 1;rms = calibrateCameraRO(objectPoints, imagePoints, imageSize, iFixedPoint,cameraMatrix, distCoeffs, rvecs, tvecs, newObjPoints,flags | CALIB_FIX_K3 | CALIB_USE_LU);printf("RMS error reported by calibrateCamera: %g\n", rms);bool ok = checkRange(cameraMatrix) && checkRange(distCoeffs);if (release_object) {cout << "New board corners: " << endl;cout << newObjPoints[0] << endl;cout << newObjPoints[boardSize.width - 1] << endl;cout << newObjPoints[boardSize.width * (boardSize.height - 1)] << endl;cout << newObjPoints.back() << endl;}objectPoints.clear();objectPoints.resize(imagePoints.size(), newObjPoints);totalAvgErr = computeReprojectionErrors(objectPoints, imagePoints,rvecs, tvecs, cameraMatrix, distCoeffs, reprojErrs);return ok;
}static void saveCameraParams(const string& filename,Size imageSize, Size boardSize,float squareSize, float aspectRatio, int flags,const Mat& cameraMatrix, const Mat& distCoeffs,const vector<Mat>& rvecs, const vector<Mat>& tvecs,const vector<float>& reprojErrs,const vector<vector<Point2f> >& imagePoints,const vector<Point3f>& newObjPoints,double totalAvgErr)
{FileStorage fs(filename, FileStorage::WRITE);time_t tt;time(&tt);struct tm* t2 = localtime(&tt);char buf[1024];strftime(buf, sizeof(buf) - 1, "%c", t2);fs << "calibration_time" << buf;if (!rvecs.empty() || !reprojErrs.empty())fs << "nframes" << (int)std::max(rvecs.size(), reprojErrs.size());fs << "image_width" << imageSize.width;fs << "image_height" << imageSize.height;fs << "board_width" << boardSize.width;fs << "board_height" << boardSize.height;fs << "square_size" << squareSize;if (flags & CALIB_FIX_ASPECT_RATIO)fs << "aspectRatio" << aspectRatio;if (flags != 0){sprintf_s(buf, "flags: %s%s%s%s",flags & CALIB_USE_INTRINSIC_GUESS ? "+use_intrinsic_guess" : "",flags & CALIB_FIX_ASPECT_RATIO ? "+fix_aspectRatio" : "",flags & CALIB_FIX_PRINCIPAL_POINT ? "+fix_principal_point" : "",flags & CALIB_ZERO_TANGENT_DIST ? "+zero_tangent_dist" : "");//cvWriteComment( *fs, buf, 0 );}fs << "flags" << flags;fs << "camera_matrix" << cameraMatrix;fs << "distortion_coefficients" << distCoeffs;fs << "avg_reprojection_error" << totalAvgErr;if (!reprojErrs.empty())fs << "per_view_reprojection_errors" << Mat(reprojErrs);if (!rvecs.empty() && !tvecs.empty()){CV_Assert(rvecs[0].type() == tvecs[0].type());Mat bigmat((int)rvecs.size(), 6, rvecs[0].type());for (int i = 0; i < (int)rvecs.size(); i++){Mat r = bigmat(Range(i, i + 1), Range(0, 3));Mat t = bigmat(Range(i, i + 1), Range(3, 6));CV_Assert(rvecs[i].rows == 3 && rvecs[i].cols == 1);CV_Assert(tvecs[i].rows == 3 && tvecs[i].cols == 1);//*.t() is MatExpr (not Mat) so we can use assignment operatorr = rvecs[i].t();t = tvecs[i].t();}//cvWriteComment( *fs, "a set of 6-tuples (rotation vector + translation vector) for each view", 0 );fs << "extrinsic_parameters" << bigmat;}if (!imagePoints.empty()){Mat imagePtMat((int)imagePoints.size(), (int)imagePoints[0].size(), CV_32FC2);for (int i = 0; i < (int)imagePoints.size(); i++){Mat r = imagePtMat.row(i).reshape(2, imagePtMat.cols);Mat imgpti(imagePoints[i]);imgpti.copyTo(r);}fs << "image_points" << imagePtMat;}if (!newObjPoints.empty()){fs << "grid_points" << newObjPoints;}
}static bool readStringList(const string& filename, vector<string>& l)
{l.resize(0);FileStorage fs(filename, FileStorage::READ);if (!fs.isOpened())return false;size_t dir_pos = filename.rfind('/');if (dir_pos == string::npos)dir_pos = filename.rfind('\\');FileNode n = fs.getFirstTopLevelNode();if (n.type() != FileNode::SEQ)return false;FileNodeIterator it = n.begin(), it_end = n.end();for (; it != it_end; ++it){string fname = (string)*it;if (dir_pos != string::npos){string fpath = samples::findFile(filename.substr(0, dir_pos + 1) + fname, false);if (fpath.empty()){fpath = samples::findFile(fname);}fname = fpath;}else{fname = samples::findFile(fname);}l.push_back(fname);}return true;
}static bool runAndSave(const string& outputFilename,const vector<vector<Point2f> >& imagePoints,Size imageSize, Size boardSize, Pattern patternType, float squareSize,float grid_width, bool release_object,float aspectRatio, int flags, Mat& cameraMatrix,Mat& distCoeffs, bool writeExtrinsics, bool writePoints, bool writeGrid)
{vector<Mat> rvecs, tvecs;vector<float> reprojErrs;double totalAvgErr = 0;vector<Point3f> newObjPoints;bool ok = runCalibration(imagePoints, imageSize, boardSize, patternType, squareSize,aspectRatio, grid_width, release_object, flags, cameraMatrix, distCoeffs,rvecs, tvecs, reprojErrs, newObjPoints, totalAvgErr);printf("%s. avg reprojection error = %.7f\n",ok ? "Calibration succeeded" : "Calibration failed",totalAvgErr);if (ok)saveCameraParams(outputFilename, imageSize,boardSize, squareSize, aspectRatio,flags, cameraMatrix, distCoeffs,writeExtrinsics ? rvecs : vector<Mat>(),writeExtrinsics ? tvecs : vector<Mat>(),writeExtrinsics ? reprojErrs : vector<float>(),writePoints ? imagePoints : vector<vector<Point2f> >(),writeGrid ? newObjPoints : vector<Point3f>(),totalAvgErr);return ok;
}int main(int argc, char** argv)
{Size boardSize, imageSize;float squareSize, aspectRatio = 1;Mat cameraMatrix, distCoeffs;string outputFilename;string inputFilename = "";int i, nframes;bool writeExtrinsics, writePoints;bool undistortImage = false;int flags = 0;VideoCapture capture;bool flipVertical;bool showUndistorted;bool videofile;int delay;clock_t prevTimestamp = 0;int mode = DETECTION;int cameraId = 1;vector<vector<Point2f> > imagePoints;vector<string> imageList;Pattern pattern = CHESSBOARD;cv::CommandLineParser parser(argc, argv,"{help ||}{w||}{h||}{pt|chessboard|}{n|10|}{d|1000|}{s|1|}{o|out_camera_data.yml|}""{op||}{oe||}{zt||}{a||}{p||}{v||}{V||}{su||}""{oo||}{ws|11|}{dt||}""{@input_data|0|}");if (parser.has("help")){help(argv);return 0;}boardSize.width = parser.get<int>("w");boardSize.height = parser.get<int>("h");if (parser.has("pt")){string val = parser.get<string>("pt");if (val == "circles")pattern = CIRCLES_GRID;else if (val == "acircles")pattern = ASYMMETRIC_CIRCLES_GRID;else if (val == "chessboard")pattern = CHESSBOARD;elsereturn fprintf(stderr, "Invalid pattern type: must be chessboard or circles\n"), -1;}squareSize = parser.get<float>("s");nframes = parser.get<int>("n");delay = parser.get<int>("d");writePoints = parser.has("op");writeExtrinsics = parser.has("oe");bool writeGrid = parser.has("oo");if (parser.has("a")) {flags |= CALIB_FIX_ASPECT_RATIO;aspectRatio = parser.get<float>("a");}if (parser.has("zt"))flags |= CALIB_ZERO_TANGENT_DIST;if (parser.has("p"))flags |= CALIB_FIX_PRINCIPAL_POINT;flipVertical = parser.has("v");videofile = parser.has("V");if (parser.has("o"))outputFilename = parser.get<string>("o");showUndistorted = parser.has("su");if (isdigit(parser.get<string>("@input_data")[0]))cameraId = parser.get<int>("@input_data");elseinputFilename = parser.get<string>("@input_data");int winSize = parser.get<int>("ws");float grid_width = squareSize * (boardSize.width - 1);bool release_object = false;if (parser.has("dt")) {grid_width = parser.get<float>("dt");release_object = true;}if (!parser.check()){help(argv);parser.printErrors();return -1;}if (squareSize <= 0)return fprintf(stderr, "Invalid board square width\n"), -1;if (nframes <= 3)return printf("Invalid number of images\n"), -1;if (aspectRatio <= 0)return printf("Invalid aspect ratio\n"), -1;if (delay <= 0)return printf("Invalid delay\n"), -1;if (boardSize.width <= 0)return fprintf(stderr, "Invalid board width\n"), -1;if (boardSize.height <= 0)return fprintf(stderr, "Invalid board height\n"), -1;if (!inputFilename.empty()){if (!videofile && readStringList(samples::findFile(inputFilename), imageList))mode = CAPTURING;elsecapture.open(samples::findFileOrKeep(inputFilename));}elsecapture.open(cameraId);if (!capture.isOpened() && imageList.empty())return fprintf(stderr, "Could not initialize video (%d) capture\n", cameraId), -2;if (!imageList.empty())nframes = (int)imageList.size();if (capture.isOpened())printf("%s", liveCaptureHelp);namedWindow("Image View", 1);for (i = 0;; i++){Mat view, viewGray;bool blink = false;if (capture.isOpened()){Mat view0;capture >> view0;view0.copyTo(view);}else if (i < (int)imageList.size())view = imread(imageList[i], 1);if (view.empty()){if (imagePoints.size() > 0)runAndSave(outputFilename, imagePoints, imageSize,boardSize, pattern, squareSize, grid_width, release_object, aspectRatio,flags, cameraMatrix, distCoeffs,writeExtrinsics, writePoints, writeGrid);break;}imageSize = view.size();if (flipVertical)flip(view, view, 0);vector<Point2f> pointbuf;cvtColor(view, viewGray, COLOR_BGR2GRAY);bool found;switch (pattern){case CHESSBOARD:found = findChessboardCorners(view, boardSize, pointbuf,CALIB_CB_ADAPTIVE_THRESH | CALIB_CB_FAST_CHECK | CALIB_CB_NORMALIZE_IMAGE);break;case CIRCLES_GRID:found = findCirclesGrid(view, boardSize, pointbuf);break;case ASYMMETRIC_CIRCLES_GRID:found = findCirclesGrid(view, boardSize, pointbuf, CALIB_CB_ASYMMETRIC_GRID);break;default:return fprintf(stderr, "Unknown pattern type\n"), -1;}// improve the found corners' coordinate accuracyif (pattern == CHESSBOARD && found) cornerSubPix(viewGray, pointbuf, Size(winSize, winSize),Size(-1, -1), TermCriteria(TermCriteria::EPS + TermCriteria::COUNT, 30, 0.0001));if (mode == CAPTURING && found &&(!capture.isOpened() || clock() - prevTimestamp > delay * 1e-3 * CLOCKS_PER_SEC)){imagePoints.push_back(pointbuf);prevTimestamp = clock();blink = capture.isOpened();}if (found)drawChessboardCorners(view, boardSize, Mat(pointbuf), found);string msg = mode == CAPTURING ? "100/100" :mode == CALIBRATED ? "Calibrated" : "Press 'g' to start";int baseLine = 0;Size textSize = getTextSize(msg, 1, 1, 1, &baseLine);Point textOrigin(view.cols - 2 * textSize.width - 10, view.rows - 2 * baseLine - 10);if (mode == CAPTURING){if (undistortImage)msg = cv::format("%d/%d Undist", (int)imagePoints.size(), nframes);elsemsg = cv::format("%d/%d", (int)imagePoints.size(), nframes);}putText(view, msg, textOrigin, 1, 1,mode != CALIBRATED ? Scalar(0, 0, 255) : Scalar(0, 255, 0));if (blink)bitwise_not(view, view);if (mode == CALIBRATED && undistortImage){Mat temp = view.clone();undistort(temp, view, cameraMatrix, distCoeffs);}imshow("Image View", view);char key = (char)waitKey(capture.isOpened() ? 50 : 500);if (key == 27)break;if (key == 'u' && mode == CALIBRATED)undistortImage = !undistortImage;if (capture.isOpened() && key == 'g'){mode = CAPTURING;imagePoints.clear();}if (mode == CAPTURING && imagePoints.size() >= (unsigned)nframes){if (runAndSave(outputFilename, imagePoints, imageSize,boardSize, pattern, squareSize, grid_width, release_object, aspectRatio,flags, cameraMatrix, distCoeffs,writeExtrinsics, writePoints, writeGrid))mode = CALIBRATED;elsemode = DETECTION;if (!capture.isOpened())break;}}if (!capture.isOpened() && showUndistorted){Mat view, rview, map1, map2;initUndistortRectifyMap(cameraMatrix, distCoeffs, Mat(),getOptimalNewCameraMatrix(cameraMatrix, distCoeffs, imageSize, 1, imageSize, 0),imageSize, CV_16SC2, map1, map2);for (i = 0; i < (int)imageList.size(); i++){view = imread(imageList[i], 1);if (view.empty())continue;//undistort( view, rview, cameraMatrix, distCoeffs, cameraMatrix );remap(view, rview, map1, map2, INTER_LINEAR);imshow("Image View", rview);char c = (char)waitKey();if (c == 27 || c == 'q' || c == 'Q')break;}}return 0;
}2-输入参数说明
" -w=<board_width> # the number of inner corners per one of board dimension\n"" -h=<board_height> # the number of inner corners per another board dimension\n"" [-pt=<pattern>] # the type of pattern: chessboard or circles' grid\n"" [-n=<number_of_frames>] # the number of frames to use for calibration\n"" # (if not specified, it will be set to the number\n"" # of board views actually available)\n"" [-d=<delay>] # a minimum delay in ms between subsequent attempts to capture a next view\n"" # (used only for video capturing)\n"" [-s=<squareSize>] # square size in some user-defined units (1 by default)\n"" [-o=<out_camera_params>] # the output filename for intrinsic [and extrinsic] parameters\n"" [-op] # write detected feature points\n"" [-oe] # write extrinsic parameters\n"" [-oo] # write refined 3D object points\n"" [-zt] # assume zero tangential distortion\n"" [-a=<aspectRatio>] # fix aspect ratio (fx/fy)\n"" [-p] # fix the principal point at the center\n"" [-v] # flip the captured images around the horizontal axis\n"" [-V] # use a video file, and not an image list, uses\n"" # [input_data] string for the video file name\n"" [-su] # show undistorted images after calibration\n"" [-ws=<number_of_pixel>] # Half of search window for cornerSubPix (11 by default)\n"" [-dt=<distance>] # actual distance between top-left and top-right corners of\n"" # the calibration grid. If this parameter is specified, a more\n"" # accurate calibration method will be used which may be better\n"" # with inaccurate, roughly planar target.\n"" [input_data] # input data, one of the following:\n"" # - text file with a list of the images of the board\n"" # the text file can be generated with imagelist_creator\n"" # - name of video file with a video of the board\n"" # if input_data not specified, a live view from the camera is used\n"
**-w <board_width> # 图片某一维方向上的交点个数-h <board_height> # 图片另一维上的交点个数[-n <number_of_frames>] # 标定用的图片帧数[-s <square_size>] # 单个方格大小(单位cm(或米)) (1 by default)[-o <out_camera_params>] # 标定相机输出文件**[-op] # write detected feature points[-oe] # write extrinsic parameters
3-输入参数示例
cameraCalibration.exe -w=8 -h=11 -s=0.03 -o=camera.yml -op -oe
-w=8:交点个数8
-h=11:交点个数11
-s:黑色方框大小0.03m
-o标定参数保存文件
4-标定文件解读
---
%YAML:1.0
---
calibration_time: "Mon Jan 24 17:10:51 2022"
nframes: 10
image_width: 640
image_height: 480
board_width: 8
board_height: 11
square_size: 2.9999999329447746e-02
flags: 0
camera_matrix: !!opencv-matrixrows: 3cols: 3dt: ddata: [ 6.0097346876749680e+02, 0., 3.2031703441387049e+02, 0.,6.0225171288478975e+02, 2.3947860507800820e+02, 0., 0., 1. ]
distortion_coefficients: !!opencv-matrixrows: 5cols: 1dt: ddata: [ -1.3711862233491057e-01, 2.7024113413198220e-01,9.1669430855309032e-04, -3.3899628828653657e-03, 0. ]
avg_reprojection_error: 2.5811669018769290e-01
per_view_reprojection_errors: !!opencv-matrixrows: 10cols: 1dt: fdata: [ 3.78828615e-01, 1.92462549e-01, 2.53371239e-01,3.21146399e-01, 2.80651748e-01, 2.09034473e-01, 2.41499245e-01,2.17772007e-01, 1.95044085e-01, 2.28271291e-01 ]
extrinsic_parameters: !!opencv-matrixrows: 10cols: 6dt: d
nframes标定次数
image_width、image_height代表图片的长宽
camera_matrix规定了摄像头的内部参数矩阵
distortion_model指定了畸变模型
distortion_coefficients指定畸变模型的系数
rectification_matrix为矫正矩阵,一般为单位阵
projection_matrix为外部世界坐标到像平面的投影矩阵
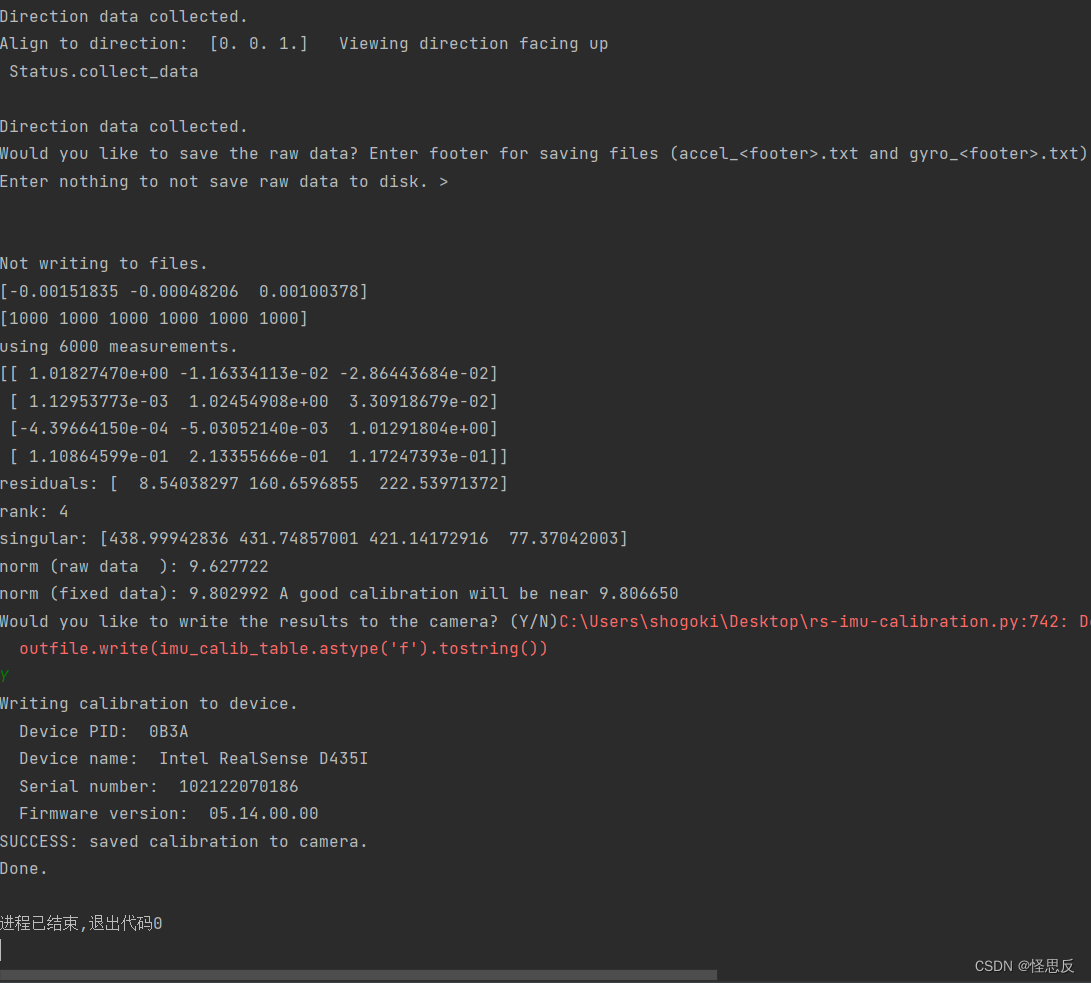
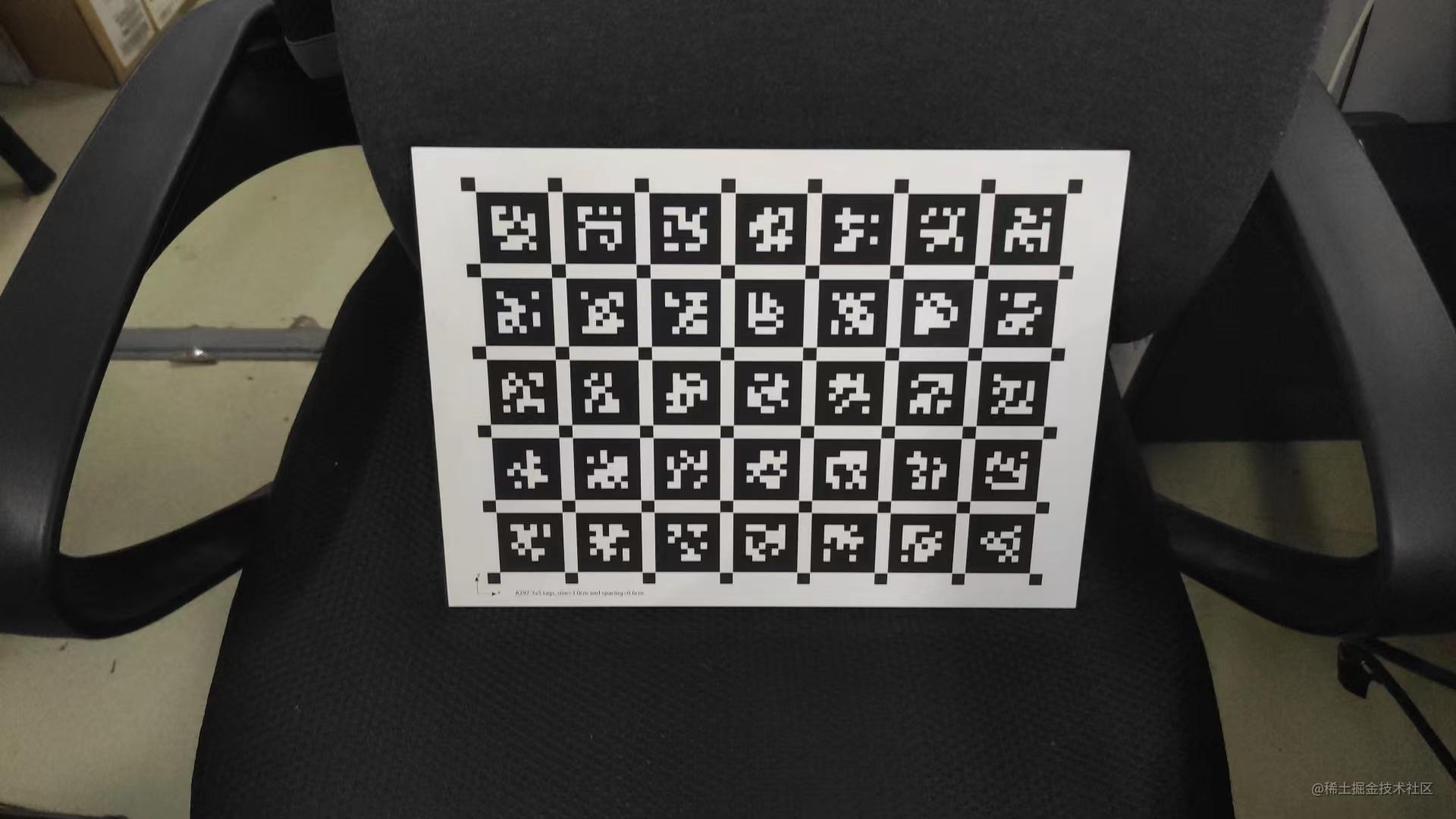
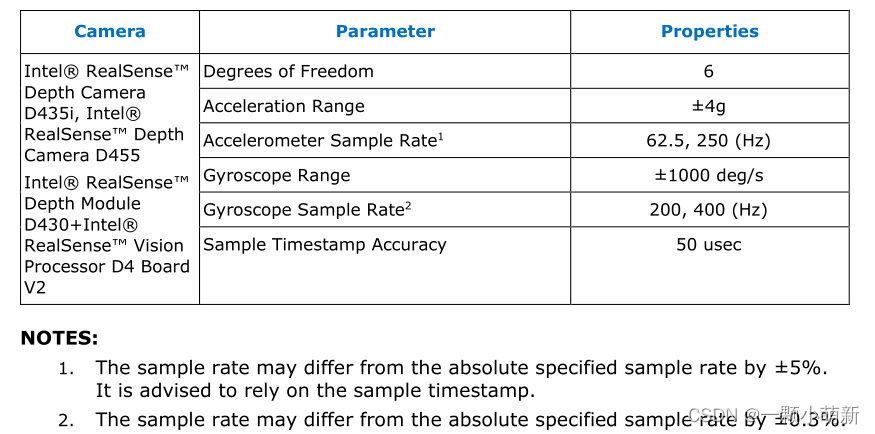
5-效果