这里使用了两个大恒金星相机,一个投影仪。
相机镜头以及投影仪的架设:
相机镜头以及投影仪的架设:
注意相对位置的摆放,投影仪的光源照亮范围要超过相机的视野。
相机与光源调整好位置后,调整成像效果。两个镜头的光圈尽量保持一致,对焦可以先把镜头光圈开到最大,然后调整调焦环使得成像清晰。为了确保景深,在对焦好后再把光圈调小。确保在标定的时候,标定点能拍摄清楚。
相机的参数对应好。
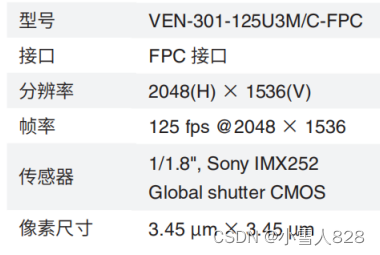
这里使用的是大恒金星相机,型号为:
VEN-301-125U3M-FPC

正在上传…重新上传取消
相机参数如下:
正在上传…重新上传取消
使用的大恒镜头型号为:HN-P-1628-6M-C2/3
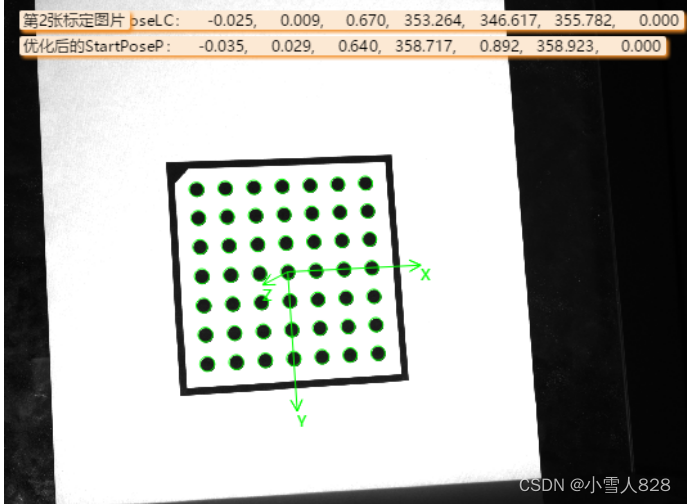
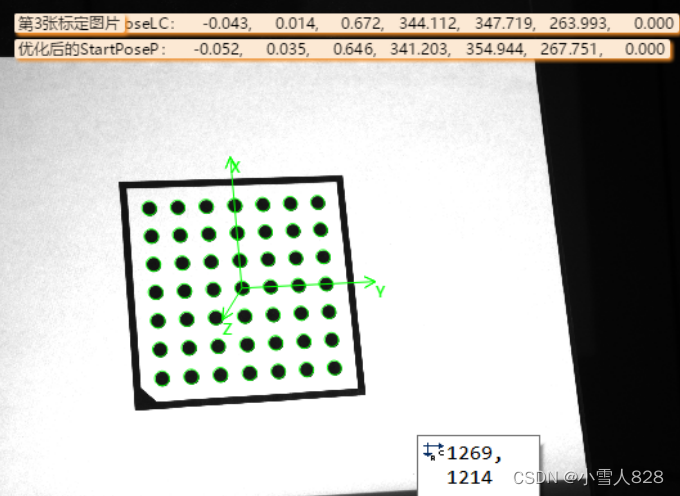
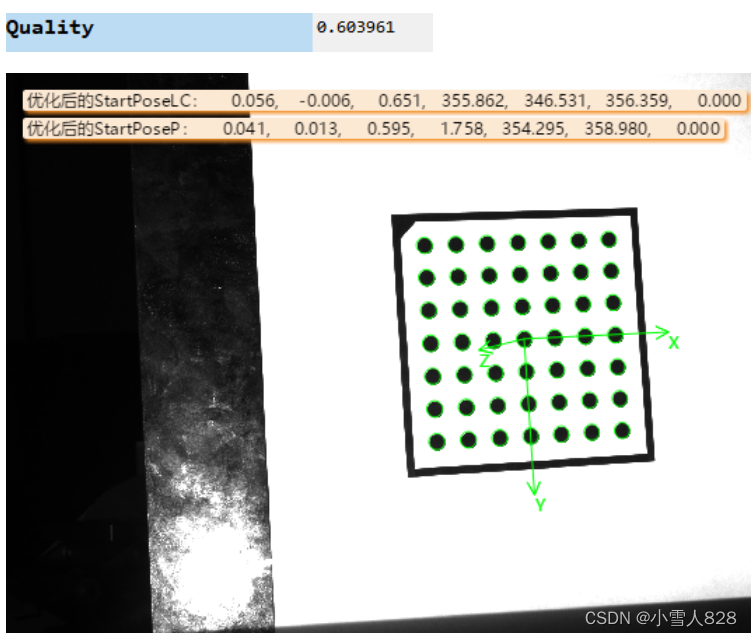
* 进行左右相机和中间光源的初始位姿设置
*左摄像机内参:(0.016(代表搭配的镜头焦距16mm)0.00000345(相机的像元大小为3.45μm),2048*1536(相机的分辨率参数))
gen_cam_par_area_scan_polynomial (0.016, 0, 0, 0, 0, 0, 0.00000345, 0.00000345, 2048/2, 1536/2, 2048, 1536, StartCamParL)
*中间光源内参:(这里用的是投影仪的参数,分辨率为1280*720)
gen_cam_par_area_scan_polynomial (0.010, 0, 0, 0, 0, 0, 0.0000054, 0.0000054, 1280/2, 720/2, 1280, 720, StartProPar)
*右摄像机内参:()
gen_cam_par_area_scan_polynomial (0.016, 0, 0, 0, 0, 0, 0.00000345, 0.00000345, 2048/2, 1536/2, 2048, 1536, StartCamParR)
标定注意事项
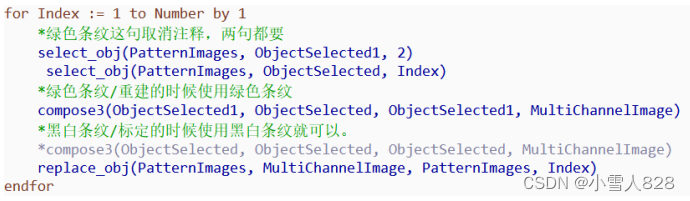
在标定的时候,同时使用条纹结构光。
在多次实测的情况下,根据现象来看,使用黑白条纹光源标定的效果更好。
重建的时候,用绿色条纹光源的效果更好。
通过修改参数设置条纹颜色。
正在上传…重新上传取消
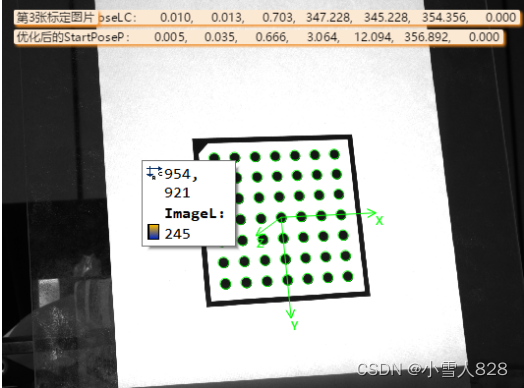
这里使用的是圆点标定板。
标定板参数记得和实际使用的标定板参数一致。否则找标定板会出错。
生成圆形标定板文件。
gen_caltab (7, 7, 0.0125, 0.5, 'caltab.descr', '1031caltab.ps')
这里代表的mark点个数是7*7,两个mark点之间的距离是0.0125m,也就是12.5mm,0.5代表mark点的直径/mark点之间的距离=0.5。
标定的图片数量,实测5张数量足够。
标定的时候,摆放标定板的位置差异实测也不需要太大,前后距离稍微调整一下。
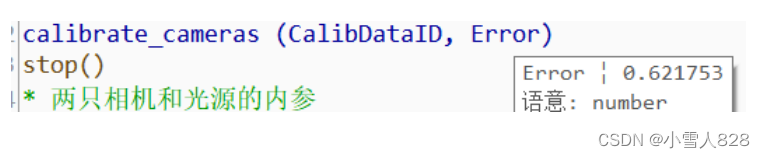
标定误差Error正常在1以下。
![]()
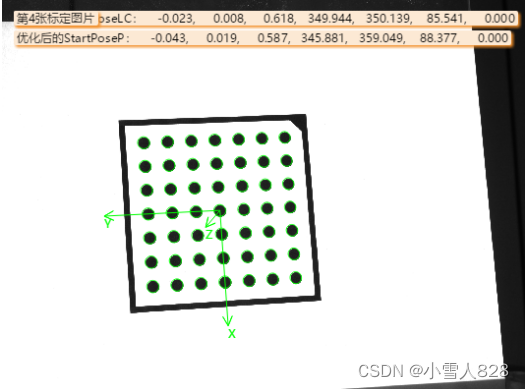
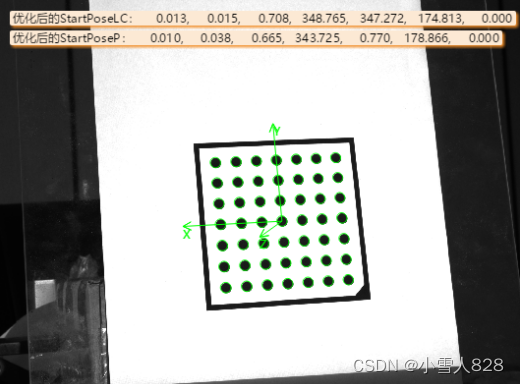
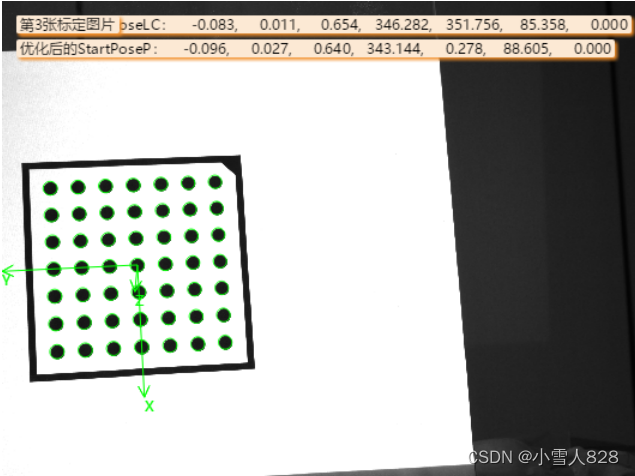
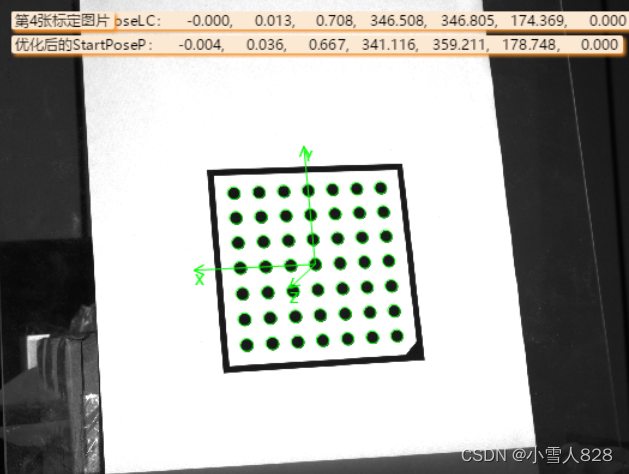
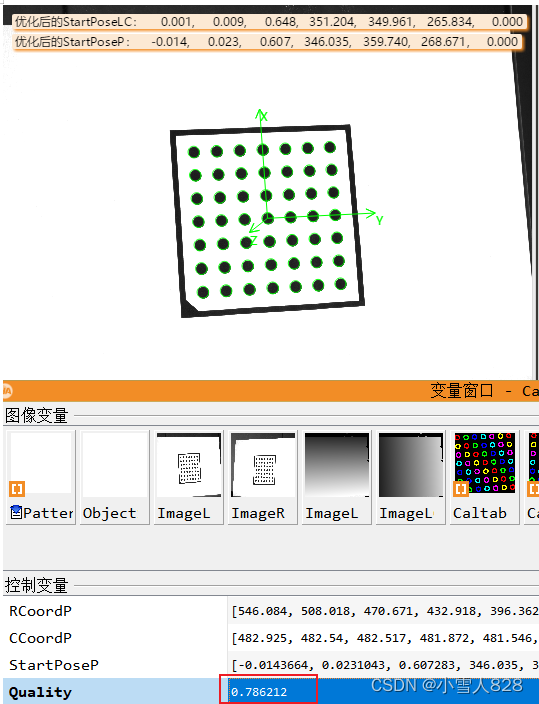
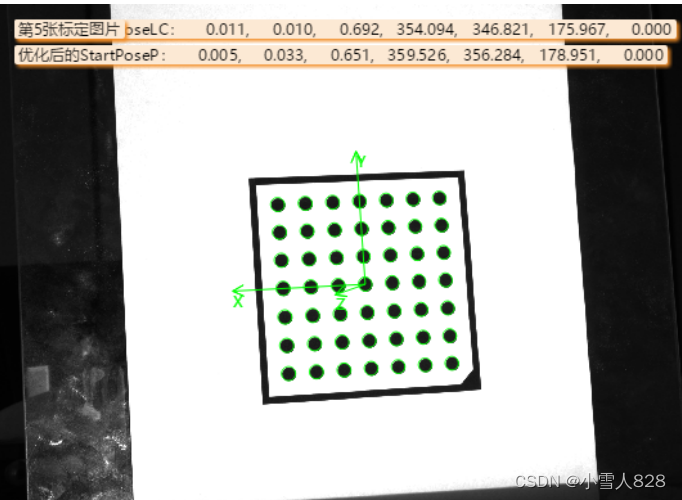
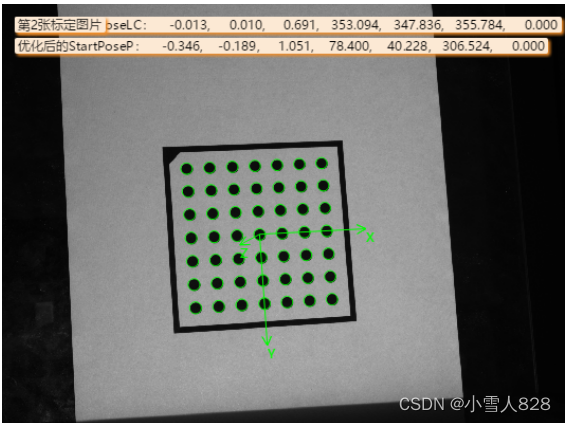
标定数据截图
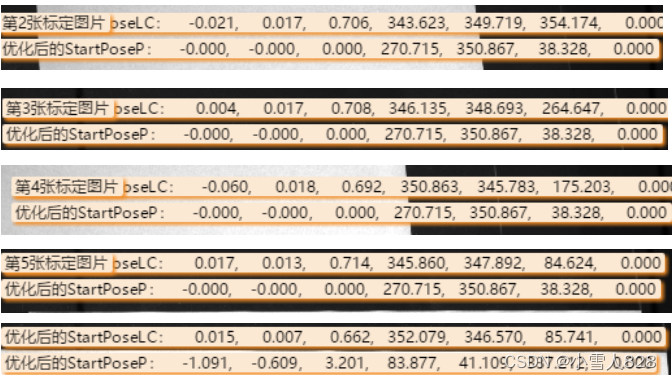
标定error

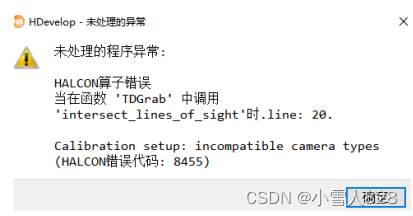
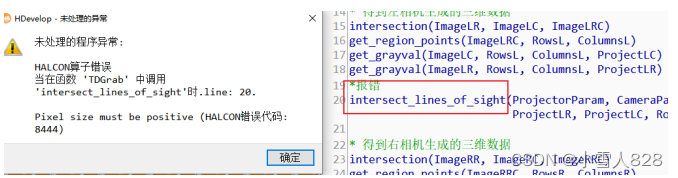
重建的时候报错:
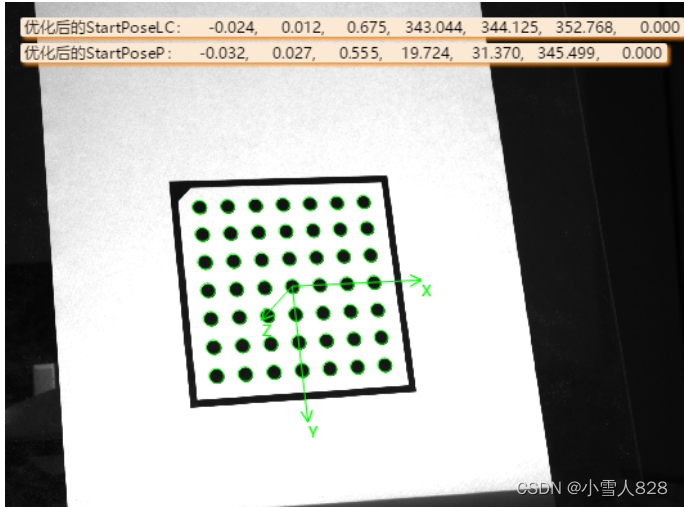
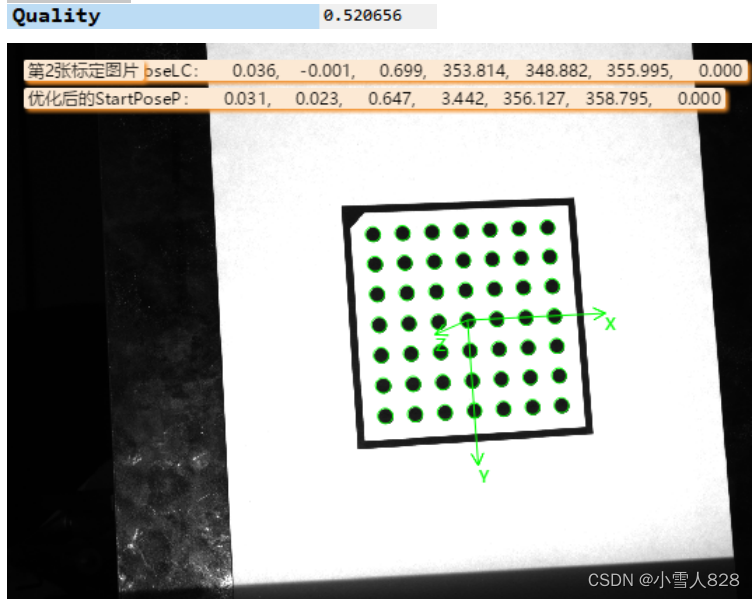
标定数据截图2:


标定结果 曝光时间80ms

重建的时候报错:
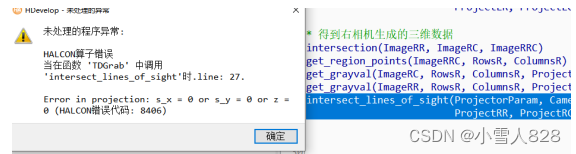


重建报错
标定板位置没有移动过
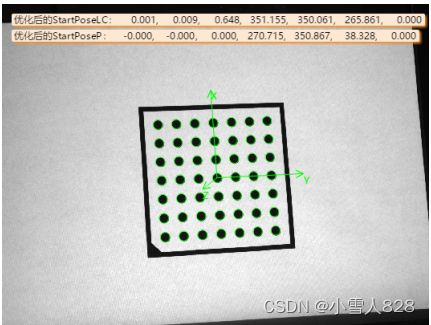
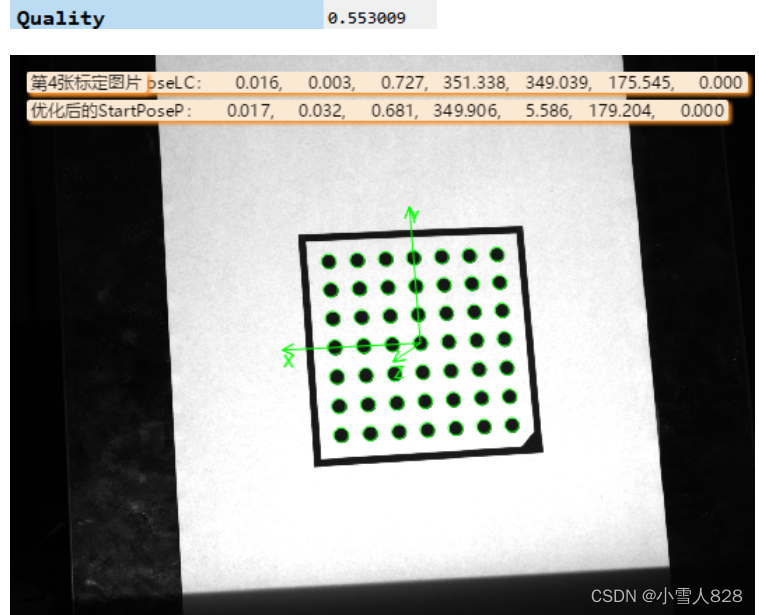
标定数据截图:(曝光时间20ms)


重构的时候报错
标定数据截图
Mingraydiffrence从30改到15.
![]()

![]()

![]()

![]()
![]()
标定结果误差

重建报错
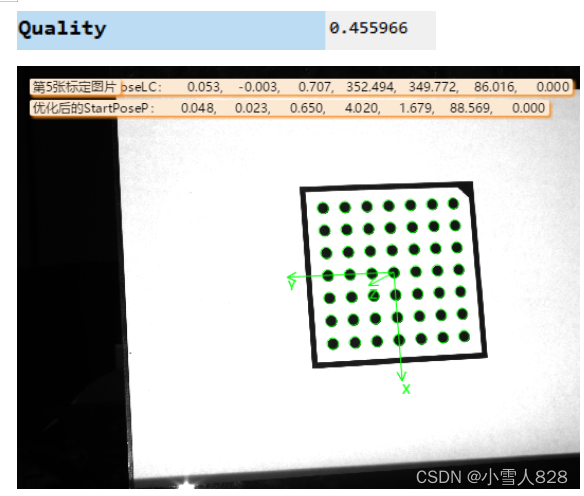
标定数据:


![]()

![]()

![]()
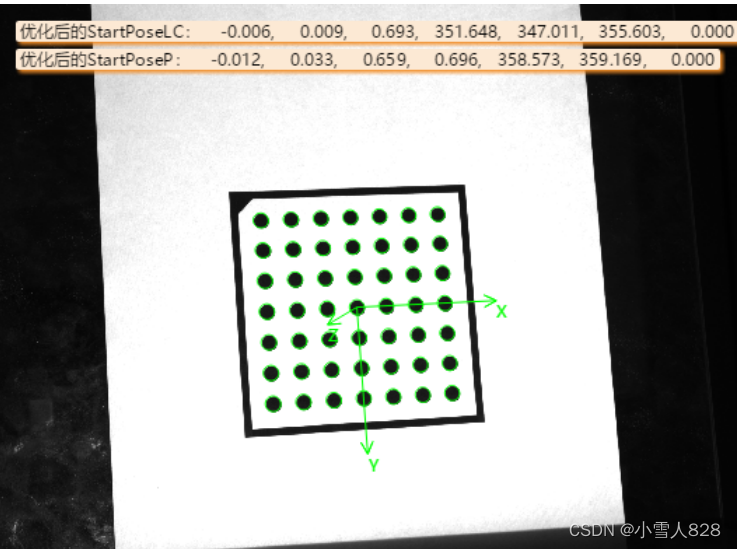
标定结果
![]()
标定数据1:

标定结果误差