答题卡识别
项目理论和源码来自唐宇迪opencv项目实战
记一篇python-opencv 完成答题卡识别 项目的学习笔记
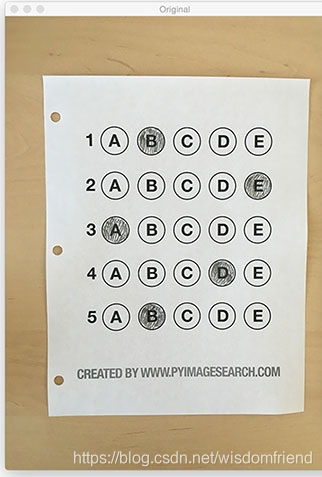
输入一张特定格式的答题卡图片(答题卡中题目数量和选项个数是固定的),能够输出此答题卡中答案的准确率。运行效果如下:
输入一张答题卡图片

输出结果

对于这类任务,先整理一下图像处理的思路。
我们输入的是一张答题卡的拍摄图片,而我们要处理的是这张答题卡的内容,需要用到透视变换将答题卡的内容单独拿出来;
提取答题卡中填涂区域的轮廓,并进行二值化处理,利用掩模与二值化后的答题卡进行对比处理。(灰度化处理、二值化、边缘检测)
在一个两层循环中遍历每一道题目的每一个选项,得出准确率。最后将准确率显示在图片上。
代码部分
image = cv2.imread(args["image"])
contours_img = image.copy()
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
cv_show('GaussianBlured',blurred)
edged = cv2.Canny(blurred, 75, 200)
cv_show('Canny',edged)
cnts = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)[1]
cv2.drawContours(contours_img, cnts, -1, (0, 0, 255), 3)
cv_show('contours_img',contours_img)
读取图片,防止原图片被更改,通常复制该图片
把图片(转化为灰度图、高斯滤波滤除噪声、Canny边缘检测),检测轮廓并在图片上绘制轮廓。
Canny边缘检测的具体步骤:
- 使用高斯滤波器平滑图像,去除噪声。
高斯滤波
https://blog.csdn.net/keith_bb/article/details/54412493
高斯滤波是一种线性平滑滤波,对于滤除图片中的高斯噪声效果显著。
滤波是对整张图像进行加权平均的过程。高斯滤波的具体操作是用一个模板扫描图像中的每一个像素点,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值。
高斯滤波器是一类根据高斯函数的形状来选择权值的线性平滑滤波器。
- 计算图片中每个像素点的强度和方向
- 非极大值抑制(NMS)消除边缘检测带来的杂散相应
比较当前点和周围点之间的梯度幅值大小,如果该店的梯度幅值最大,则保留该点位边界点。否则将该点抑制掉
- 用双阈值检测来确定真实的和潜在的边缘
对于函数中的两个参数,如果梯度值>maxval,则按边界处理;
如果minval<梯度值<maxval,且该点与边界点连接,则将该点视为边界点。否则舍弃该点;
如果梯度值<minval,则判断该点不是边界点
- 通过抑制孤立的弱边缘完成边缘检测
Canny边缘检测结果如图所示:

接着检测图片中的轮廓
cnts = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[1]
检测外轮廓,参数cv2.CHAIN_APPROX_SIMPLE表示图像轮廓的逼近方式。
该函数的返回值是存放轮廓的list结构。
if len(cnts) > 0:cnts = sorted(cnts, key=cv2.contourArea, reverse=True)for c in cnts:peri = cv2.arcLength(c, True)approx = cv2.approxPolyDP(c, 0.02 * peri, True)print('approx', approx)if len(approx) == 4:docCnt = approxbreak
遍历所有检测到的轮廓,根据轮廓面积大小进行排序。求近似轮廓,精度为轮廓周长的2%。取函数cv2.approxPolyDP的前四个返回值,这四个点围成了图片中最大的轮廓。
返回approx结果为:
def four_point_transform(image, pts):rect = order_points(pts)(bl, br, tr, tl) = rectwidthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))maxWidth = max(int(widthA), int(widthB))heightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))maxHeight = max(int(heightA), int(heightB))dst = np.array([[0, 0],[maxWidth - 1, 0],[maxWidth - 1, maxHeight - 1],[0, maxHeight - 1]], dtype="float32")M = cv2.getPerspectiveTransform(rect, dst)warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))return warped
函数four_point_transform的作用是输入四个轮廓点的坐标,将原图像中轮廓背的图像映射到另一个图片中。
将输入的这四个轮廓点区分出(左上、左下、右下、右上),答题卡的外轮廓近似为矩形,所以根据这四个点的坐标计算出矩形的宽和高,根据宽和高的长度计算出透视变换后答题卡在新的图片中的坐标。
函数M = cv2.getPerspectiveTransform(rect, dst)计算的是从原图像的坐标映射到新的图像的变换矩阵。
最后返回透视变换后的图像。
如何根据坐标来区分四个轮廓点在矩形上的位置
分别计算四个点横、纵坐标的和、差
| 和 | 差 | |
|---|---|---|
| 最大值 | 右上角 | 右下角 |
| 最小值 | 左下角 | 左上角 |
灰度图透视变换的结果如图所示:

在透视变换的基础上对图像进行二值化处理:
thresh = cv2.threshold(warped, 0, 255, cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1]
对于双峰的情况采用大津法(一种自适应的二值化处理方法),不需要指定二值化的阈值(不代表阈值为0)
二值化的结果如图所示:

下一步进行轮廓检测,目的是滤除其他图像的干扰,只保留填涂的圆圈部分的图形。由于填涂部分的圆圈大小相同,根据外接矩形的长宽比滤除其他干扰图形。滤除后的结果如图所示:

接着绘制每一个填涂圆圈的掩模,由于填涂后的答题卡在二值图像中>0的像素点较多,而且掩模中的圆圈部分的像素值为255,其余部分的像素值为0,将掩模与原图像进行“与”操作,得到每一个圆圈的“与”运算结果,判断该选项的圆圈是否被填涂了。
代码如下:
for (q, i) in enumerate(np.arange(0, len(questionCnts), 5)):cnts = sort_contours(questionCnts[i:i + 5])[0]print('cnts', cnts)bubbled = Nonefor (j, c) in enumerate(cnts):mask = np.zeros(thresh.shape, dtype="uint8")cv2.drawContours(mask, [c], -1, 255, -1) #-1表示填充cv_show('mask',mask)mask = cv2.bitwise_and(thresh, thresh, mask=mask)total = cv2.countNonZero(mask)if bubbled is None or total > bubbled[0]:bubbled = (total, j)color = (0, 0, 255)k = ANSWER_KEY[q]if k == bubbled[1]:color = (0, 255, 0)correct += 1cv2.drawContours(warped, [cnts[k]], -1, color, 3)
定义了一个2层的循环,外层循环便是遍历不同的行,内层循环表示同一行中不同的列。
由于事先定义了一个字典,存放了正确答案
ANSWER_KEY = {0: 1, 1: 4, 2: 0, 3: 3, 4: 1}
将掩模“与”运算的结果与答案进行对照,得到答题卡的得分,并计算出准确率。
最后输出结果,将准确率写在最后的输出图片上。
至此答题卡识别项目完成
完整代码如下
# 导入工具包
import numpy as np
import argparse
import imutils
import cv2# 设置参数
ap = argparse.ArgumentParser()
ap.add_argument("-i", "--image", required=True,help="path to the input image")
args = vars(ap.parse_args())# 正确答案
# 字典:键值对,第几个位置对应正确答案对应的索引值
ANSWER_KEY = {0: 1, 1: 4, 2: 0, 3: 3, 4: 1}# 提取轮廓def order_points(pts):# 一共4个坐标点,定义一个4行两列的元素为0的矩阵。rect = np.zeros((4, 2), dtype="float32")# 找出图像中四个顶点的坐标。# 按顺序找到对应坐标0123分别是 左下、右下、右上、左上# 计算左上,右下# 现在pts中是4个向量,axis为1表示将矩阵的行向量相加。# [[0, 1],# [1, 1],# [1, 0],# [0, 0]]s = pts.sum(axis=1)print('s', s)# rect[0]表示左下, rect[2]表示右上rect[0] = pts[np.argmin(s)]rect[2] = pts[np.argmax(s)]print('rect[0][2]', rect[0], rect[2])# 计算右下和左上diff = np.diff(pts, axis=1)rect[1] = pts[np.argmin(diff)]rect[3] = pts[np.argmax(diff)]print('rect[1][3]', rect[1], rect[3])return rect
# 执行完order_point操作后,pts中存放的是按照左下、右下、右上、左上顺序排列的四个顶点的坐标def four_point_transform(image, pts):# 获取输入坐标点rect = order_points(pts)(bl, br, tr, tl) = rect# 计算输入的w和h值widthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))maxWidth = max(int(widthA), int(widthB))heightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))maxHeight = max(int(heightA), int(heightB))# 变换后对应坐标位置dst = np.array([[0, 0],[maxWidth - 1, 0],[maxWidth - 1, maxHeight - 1],[0, maxHeight - 1]], dtype="float32")# 计算变换矩阵# 透视变换M = cv2.getPerspectiveTransform(rect, dst)warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))# 返回变换后结果return warped# 对检测到的轮廓进行排序def sort_contours(cnts, method="left-to-right"):reverse = Falsei = 0if method == "right-to-left" or method == "bottom-to-top":reverse = Trueif method == "top-to-bottom" or method == "bottom-to-top":i = 1boundingBoxes = [cv2.boundingRect(c) for c in cnts](cnts, boundingBoxes) = zip(*sorted(zip(cnts, boundingBoxes),key=lambda b: b[1][i], reverse=reverse))return cnts, boundingBoxesdef cv_show(name,img):cv2.imshow(name, img)cv2.waitKey(0)cv2.destroyAllWindows()# 预处理image = cv2.imread(args["image"])
contours_img = image.copy()
# 彩色图片转化为灰度图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 高斯滤波去噪
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
cv_show('GaussianBlured',blurred)
# Canny边缘检测
edged = cv2.Canny(blurred, 75, 200)
cv_show('Canny',edged)# 用边缘检测的结果进行轮廓检测
# cv2.RETR_EXTERNAL表示只检测最外层的轮廓
# cv2.findContours函数有三个返回值:
# binary(二值图像)、contours(List存放检测到的所有轮廓)、hierarchy(表示层级信息)
# 查找的轮廓保存在cnts中
cnts = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)[1]
# 画出轮廓
# cv2.drawContours(image, contours, contourIdx, color, thickness=None, lineType=None, hierarchy=None, maxLevel=None, offset=None)
# 第一个参数是指明在哪幅图像上绘制轮廓;image为三通道才能显示轮廓
# 第二个参数是轮廓本身,在Python中是一个list;
# 第三个参数指定绘制轮廓list中的哪条轮廓,如果是-1,则绘制其中的所有轮廓。后面的参数很简单。其中thickness表明轮廓线的宽度,如果是-1(cv2.FILLED),则为填充模式。cv2.drawContours(contours_img, cnts, -1, (0, 0, 255), 3)
cv_show('contours_img',contours_img)
docCnt = None# 确保检测到了轮廓
if len(cnts) > 0:# 根据轮廓大小进行排序cnts = sorted(cnts, key=cv2.contourArea, reverse=True)# 遍历每一个轮廓for c in cnts:# 近似# cv2.arcLength函数返回值是轮廓的周长,第二个参数表示轮廓是否闭合peri = cv2.arcLength(c, True)# cv2.approxPolyDP函数对轮廓进行近似处理,在一定精度范文诶,将弧用弦来近似代替。# 通常精度用周长的百分比来计算# 返回值是围成最大轮廓的点的坐标approx = cv2.approxPolyDP(c, 0.02 * peri, True)print('approx', approx)# 准备做透视变换if len(approx) == 4:docCnt = approxbreak# 执行透视变换warped = four_point_transform(gray, docCnt.reshape(4, 2))
cv_show('the result of four point transform',warped)
# Otsu's 阈值处理
# 大津法进行图像二值化处理,对于双峰的情况能够自动识别出阈值
# 使用自适应的二值化处理
thresh = cv2.threshold(warped, 0, 255,cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1]
cv_show('thresh',thresh)
thresh_Contours = thresh.copy()
# 找到每一个圆圈轮廓
cnts = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)[1]
cv2.drawContours(thresh_Contours, cnts, -1, (0, 0, 255), 3)
cv_show('thresh_Contours',thresh_Contours)
questionCnts = []# 遍历
for c in cnts:# 遍历轮廓,计算轮廓的外接矩形,满足固定比例则看做答题的圆圈位置。(x, y, w, h) = cv2.boundingRect(c)ar = w / float(h)# 根据实际情况指定标准# 宽度和高度都大于20,而且宽高比在0.9和1.1之间。# 则判定该轮廓为答题的圆圈if w >= 20 and h >= 20 and ar >= 0.9 and ar <= 1.1:questionCnts.append(c)# 按照从左到右从上到下进行排序
questionCnts = sort_contours(questionCnts,method="top-to-bottom")[0]
# 初始化的得分为0
correct = 0# 每排有5个选项
# 从0到len(questionCnts)
# 枚举,分别取0, 5, 10,……
# 遍历不同的题目
for (q, i) in enumerate(np.arange(0, len(questionCnts), 5)):# 排序cnts = sort_contours(questionCnts[i:i + 5])[0]print('cnts', cnts)bubbled = None# 遍历每一个结果# 对于统一体的不同选项for (j, c) in enumerate(cnts):# 使用mask来判断结果# 制作每一个选项的圆圈mask,只有选项的位置为255,其他位置为0。mask = np.zeros(thresh.shape, dtype="uint8")cv2.drawContours(mask, [c], -1, 255, -1) #-1表示填充cv_show('mask',mask)# 通过计算非零点数量来算是否选择# 将mask于二值化的图像进行与运算# 利用掩膜(mask)进行“与”操作,# 即掩膜图像白色区域是对需要处理图像像素的保留,# 黑色区域是对需要处理图像像素的剔除,# 其余按位操作原理类似只是效果不同而已。# 本实例中依次保留每一个选项的圆圈区域。mask = cv2.bitwise_and(thresh, thresh, mask=mask)# cv2.countNonZero函数的作用是统计非零像素点。# 也就是判断这个选项涂没涂上。total = cv2.countNonZero(mask)# 通过阈值判断if bubbled is None or total > bubbled[0]:bubbled = (total, j)# 对比正确答案color = (0, 0, 255)k = ANSWER_KEY[q]# 判断正确if k == bubbled[1]:color = (0, 255, 0)correct += 1# 绘图cv2.drawContours(warped, [cnts[k]], -1, color, 3)# 计算得分
score = (correct / 5.0) * 100
print("[INFO] score: {:.2f}%".format(score))
# 把得分以文本的形式显示在图片上。
cv2.putText(warped, "{:.2f}%".format(score), (10, 30),cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 2)
cv2.imshow("Original", image)
cv2.imshow("Exam", warped)
cv2.waitKey(0)