专题一:机器人参数化建模与仿真分析、优化设计专题课程大纲
|
教学案例:
|
|
教学案例:
|
| 三、机器人动力学仿真 |
教学案例: |
| |
| 四、机器人刚度建模 |
教学案例:
|
| 五、机器人优化设计 |
教学案例: |
| |
| 六、机器人控制仿真 |
|
| 七、机器人运动规划 |
|





| 学习目标:从整体上全面认识软体机器人领域所涉及的各方面研究内容,便于大家结合自己的研究点做广泛的交叉推演,更有利于激发创新点,突破“无想法”的僵局。
|
与论文复现 | 学习目标:为大家提想法,写小论文提供一些借鉴
|
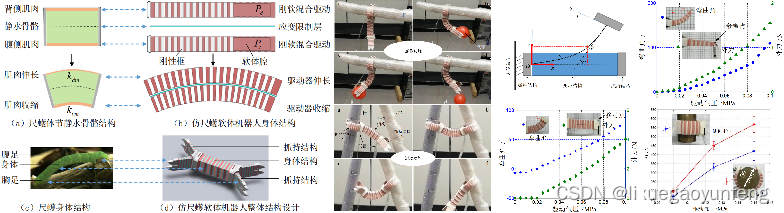
运动建模与仿真 | 学习目标:掌握基于Kane法的软体生物运动建模
2. 尺蠖的身体结构特征与运动建模面临的难点 3. 尺蠖身体运动动力学建模与运动行为仿真(理论方法+模型推导)
4. 讨论与交流 |
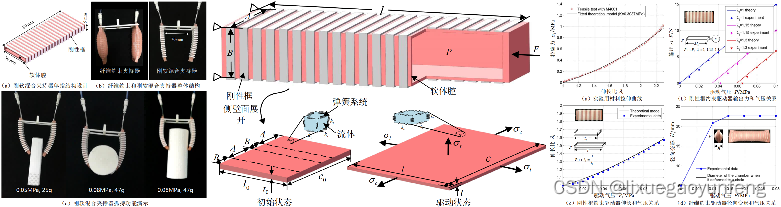
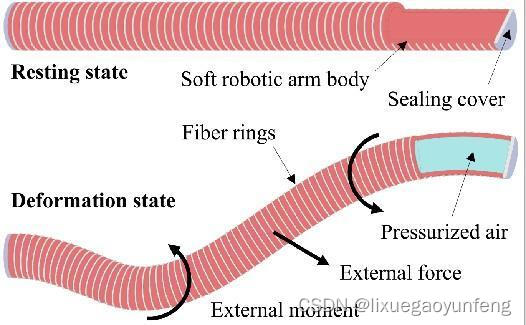
| 学习目标:掌握基于虚功原理的软体机械臂静力学建模方法
2. 软体机械臂静力学建模方法研究现状与面临难点 3.融合材料和几何非线性的软体机械臂静力学建模方法研究(理论方法+模型推导+matlab仿真)
|
实验中制作的 方法及技巧 | 学习目标:借鉴软体结构在实验室的制作方法,学习一些技巧并开拓思路 1. 基于介电弹性体的软体功能结构制作 2.柔性约束软体气动驱动器、软体机械臂的制作 3. 刚性约束刚软混合气动驱动器、仿尺蠖软体机器人的制作 4. 颗粒阻塞/层阻塞(jamming)变刚度结构的制作 |
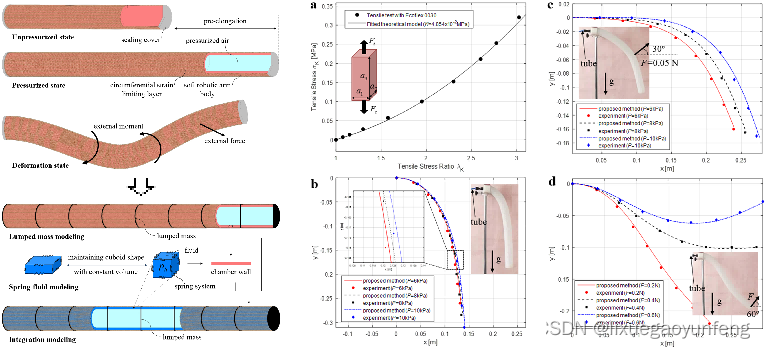
| 学习目标:掌握基于连续介质力学的软体结构建模方法 1. 柔顺线性驱动器的研究背景与意义 2. 柔顺线性驱动器研究现状与面临问题 3. 一种新型柔顺线性驱动器的研究 4. 关键功能部分力学建模(非均匀轴对称软体结构的力学建模+模型推导+matlab仿真) |
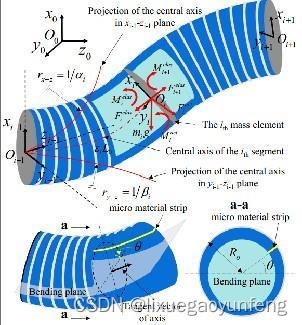
| 学习目标:掌握基于虚功率原理的软体机械臂动力学建模方法 1. 软体机械臂动力学建模方法研究现状与面临难点 2. 融合材料和几何非线性的软体机械臂动力学建模方法研究(理论方法+模型推导+matlab仿真)
3. 讨论与交流 |
| 八、方向创新点 | 1. 软体结构设计方向创新点探讨 (交叉融合) 2. 软体结构控制方向创新点探讨 (深度学习) 3. 软体机器人材料方向创新点探讨 (立足于实际条件,模仿借鉴) |
| 九、总结与回顾 | 1、总结回顾课程内容 2、自由提问交流环节 |

刚柔软机器人结构仿真分析与优化设计刚柔软机器人结构仿真分析与优化设计线上专题-无限回放-班级群答疑课程简介刚柔软机器人结构仿真分析与优化设计软https://mp.weixin.qq.com/s?__biz=Mzg2NDg0MTkzMw==&mid=2247484785&idx=1&sn=272d7f83066b85b8a8a70067f8b2c66f&chksm=ce627cd3f915f5c532c7b7166e7d869cdbf48ef1030775746a712a99a44f7105f0e0171b9584#rd