图论刷题
- 机器人的运动范围
- 矩阵中的路径
- 图像渲染
- 水位上升的泳池中游泳
- 寻找图中是否存在路径
- 所有可能的路径
797. 所有可能的路径
力扣地址:https://leetcode.cn/problems/all-paths-from-source-to-target/
这是一道比较典型的深度优先遍历、广度优先遍历案例,强烈推荐初学者完成这道题并且常常回来看看(也欢迎来看看我的博客 ~ )
难度:中等
- 深度优先遍历
- 广度优先遍历
问题描述
给你一个有 n 个节点的 有向无环图(DAG),请你找出所有从节点 0 到节点 n-1 的路径并输出(不要求按特定顺序)
graph[i] 是一个从节点 i 可以访问的所有节点的列表(即从节点 i 到节点 graph[i][j] 存在一条有向边)。
示例 1:
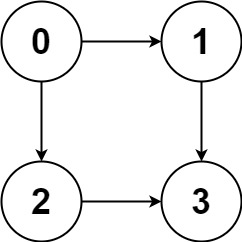
输入:graph = [[1,2],[3],[3],[]]
输出:[[0,1,3],[0,2,3]]
解释:有两条路径 0 -> 1 -> 3 和 0 -> 2 -> 3
示例2:
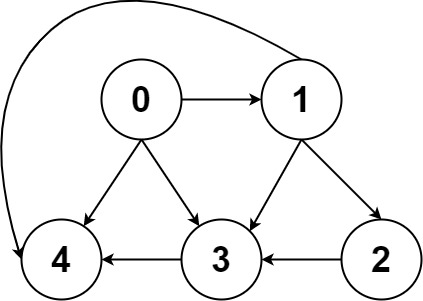
输入:graph = [[4,3,1],[3,2,4],[3],[4],[]]
输出:[[0,4],[0,3,4],[0,1,3,4],[0,1,2,3,4],[0,1,4]]
提示:
- n == graph.length
- 2 <= n <= 15
- 0 <= graph[i][j] < n
- graph[i][j] != i(即不存在自环)
- graph[i] 中的所有元素 互不相同
- 保证输入为
有向无环图(DAG)
问题分析
理解题目
以示例1 为例,输入的是 graph = [[1,2],[3],[3],[]] ,也就是graph[0] = [1, 2] 表示 索引为 0 的点可以到达 1 和 2 两个点,graph[1] = [3] 表示索引为 1 的点可以到达 3。也就是说,graph[i] 即表示索引为 i 的点可以到达的点。
输出结果表示从起点(索引为0) 到终点索引为 n-1 的所有路径。比如这个例子输出的结果为 [[0,1,3],[0,2,3]] 即表示 0 到 3 的所有路径。
引如深度优先遍历
首先回顾一下深度优先遍历的写法,也可以参考一下我们完成的第一道题:机器人的运动范围 ,接着我们需要确定深度遍历的 遍历规则,也就是 当前点可以到达的下一个点 ,最后我们开始遍历的时候必须指定结束的条件,这个题目中,我们的结束条件就是访问到的点的索引为 n-1。
代码实现
class Solution {
public:// 所有的路径vector<vector<int>> allWays;// 现在走的路vector<int> oneWay;/*** 深度遍历图路径,因为是有向无环图所以不用考虑 "走回头路" 这种情况* 我们tarvel的目标是前往索引为 n - 1 的点 */void travel(vector<vector<int>>& graph, int current) {// 到达终点if (current == graph.size() - 1) {allWays.push_back(oneWay);return;}// graph[current] 表示当前点能够去的所有风景区,我们现在每个地方都去看看能不能到终点for (auto next : graph[current]) {// 记录一下我们当前走的路oneWay.push_back(next);travel(graph, next);// 不管前面的道路有没有到达,我们回到前一个地方oneWay.pop_back();}}vector<vector<int>> allPathsSourceTarget(vector<vector<int>>& graph) {oneWay.push_back(0);travel(graph, 0);return allWays;}
};
执行效果如图所示:

补充:
- 这道题明确提示了
有向无环图,这里的无环告诉我们不需要考虑走回头路的问题,所以不用担心travel 不终止问题; oneWay也可以是栈,因为我们时钟只是操作top的那个位置的点。
总结
一般而言,有向图比无向图更加复杂,但是有向无环图很显然简单得多,因为我们不需要考虑绕了一圈回到原点的难题,只要我们能继续向前,那么每次去的地方一定是新的点,我们如果确定前方没有路了,就可以确定这个点不能到达终点,可以 回头 看看 来时的路。
Smileyan
2023.03.31 13:26