写在前面:
以下内容来自ros官网:https://www.ros.org/news/2017/01/new-package-plotjuggler.html
github链接:https://github.com/facontidavide/PlotJuggler
一、PlotJuggler 介绍
PlotJuggler,一个基于Qt的应用程序,允许用户加载、搜索和打印数据。许多ROS用户会为此使用MATLAB或rqt_plot,但是当要分析的数据相当大时,使用这些解决方案可能会不尽人意。
PlotJuggler是rqtplot和rqtbag更好的替代品,它提供了更友好的用户界面。
特征:
Multiplot(多曲线):将多条曲线添加到绘图中。在行、列、选项卡和/或单独的窗口中排列绘图。
Zoom(缩放):轻松缩放绘图。可以锁定所有绘图的X轴。
Save/Load layouts(保存/加载布局):组织布局后,可以将其保存到文件中以供以后重用。
Complete Undo/Redo(完全撤消/重做):CTRL-Z按您的预期操作。
DataLoad plugins(数据加载插件):轻松加载CSV或rosbags。
DataStreaming plugins(数据流插件):订阅一个或多个ros主题并实时绘制它们的数据。
RosPublisher plugin(RosPublisher 插件):使用交互式跟踪器重新发布原始ROS消息。
二、PlotJuggler 安装
由于自己是 Ubuntu16.04 ROS-kinetic用户,所以只介绍ROS 用户的安装方法。
1. 二进制安装
由于自己是ROS用户,所以直接二进制安装,然后运行就可以了。
sudo apt-get install ros-kinetic-plotjuggler
如果安装报错,那就先安装QT5:
则
Ubuntu用户先运行一下:
sudo apt-get -y install qtbase5-dev libqt5svg5-dev qtdeclarative5-dev qtmultimedia5-dev libqt5multimedia5-plugins
Fedora用户先运行一下:
sudo dnf install qt5-qtbase-devel qt5-qtsvg-devel qt5-qtdeclarative-devel qt5-qtmultimedia-devel
安装完成后运行:
roscore
rosrun plotjuggler plotjuggler
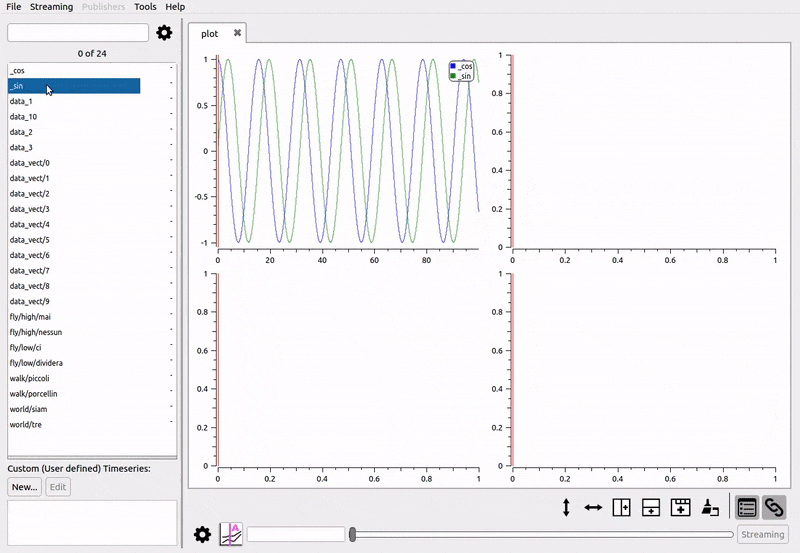
接下来就可以看到如下界面:
 然后通过 File–>Load Data 导入CSV或rosbags数据,然后把对应的topic数据拖到右侧就可以了。
然后通过 File–>Load Data 导入CSV或rosbags数据,然后把对应的topic数据拖到右侧就可以了。
如果加载 .bag 文件的时候不支持加载 .bag 文件,那么需要安装包ros-kinetic-plotjuggler-ros
sudo apt-get install ros-kinetic-plotjuggler-ros
2. 源码安装
如果你想从源代码编译它,比如在master分支上尝试最新版本,你必须使用catkin或colcon来构建PlotJuggler,否则与ROS相关的插件将不包括在内。
使用catkin 工具编译:
mkdir -p ws_plotjuggler/src
cd ws_plotjuggler/src
git clone https://github.com/facontidavide/PlotJuggler.git
cd ..catkin make
source devel/setup.bash
安装完成后运行:
roscore
rosrun plotjuggler PlotJuggler
参考链接:
[1] ros官网:https://www.ros.org/news/2017/01/new-package-plotjuggler.html
[2] github链接:https://github.com/facontidavide/PlotJuggler
[3] plotjuggler - http://wiki.ros.org/plotjuggler