最近研究STM32的自平衡小车,发现有两座必过的大山,一为卡尔曼滤波,二为PID算法。 网上看了很多关于卡尔曼滤波的代码,感觉写得真不咋地。一怒之下,自己重写,不废话,贴代码 [pre lang="C" line="1" file="kalman.h"]/** ****************************************************************************** * @file kalman.h * @author willieon * @version V0.1 * @date January-2015 * @brief 卡尔曼滤波算法 * * ****************************************************************************** * @attention *本人对卡尔曼的粗略理解:以本次测量角速度(陀螺仪测量值)的积分得出的角度值 * 与上次最优角度值的方差产生一个权重来衡量本次测量角度(加速度测量值) * 与上次最优角度值,从而产生新的最优角度值。好吧,比较拗口,有误处忘指正。 * ****************************************************************************** */ #ifndef __KALMAN_H__ #define __KALMAN_H__ #define Q_angle 0.001 角度过程噪声的协方差 #define Q_gyro 0.003 角速度过程噪声的协方差 #define R_angle 0.5 测量噪声的协方差(即是测量偏差) #define dt 0.01 卡尔曼滤波采样频率 #define C_0 1 /**************卡尔曼运算变量定义********************** * ***由于卡尔曼为递推运算,结构体需定义为全局变量 ***在实际运用中只需定义一个KalmanCountData类型的变量即可 ***无需用户定义多个中间变量,简化函数的使用 */ typedef struct { float Q_bias; 最优估计值的偏差,即估计出来的陀螺仪的漂移量 float Angle_err; 实测角度与陀螺仪积分角度的差值 float PCt_0; float PCt_1; float E; 计算的过程量 float K_0; 含有卡尔曼增益的另外一个函数,用于计算最优估计值 float K_1; 含有卡尔曼增益的函数,用于计算最优估计值的偏差 float t_0; float t_1; float Pdot[4]; Pdot[4] = {0,0,0,0};过程协方差矩阵的微分矩阵 float PP[2][2]; PP[2][2] = { { 1, 0 },{ 0, 1 } };协方差(covariance) float Angle_Final; 后验估计最优角度值(即系统处理最终值) float Gyro_Final; 后验估计最优角速度值 }KalmanCountData; void Kalman_Filter(float Accel, float Gyro ,KalmanCountData * Kalman_Struct); void Kalman_Filter_Init(KalmanCountData * Kalman_Struct); #endif [/pre] kalman.c [pre lang="C" line="1" file="kalman.c"] #include "kalman.h" /** ****************************************************************************** * @file void Kalman_Filter_Init(KalmanCountData * Kalman_Struct) * @author willieon * @version V0.1 * @date January-2015 * @brief 卡尔曼滤波计算中间量初始化 * * ****************************************************************************** * @attention * * * * ****************************************************************************** */ void Kalman_Filter_Init(KalmanCountData * Kalman_Struct) { Kalman_Struct -> Angle_err = 0; Kalman_Struct -> Q_bias = 0; Kalman_Struct -> PCt_0 = 0; Kalman_Struct -> PCt_1 = 0; Kalman_Struct -> E = 0; Kalman_Struct -> K_0 = 0; Kalman_Struct -> K_1 = 0; Kalman_Struct -> t_0 = 0; Kalman_Struct -> t_1 = 0; Kalman_Struct -> Pdot[0] = 0; Kalman_Struct -> Pdot[1] = 0; Kalman_Struct -> Pdot[2] = 0; Kalman_Struct -> Pdot[3] = 0; Kalman_Struct -> PP[0][0] = 1; Kalman_Struct -> PP[0][1] = 0; Kalman_Struct -> PP[1][0] = 0; Kalman_Struct -> PP[1][1] = 1; Kalman_Struct -> Angle_Final = 0; Kalman_Struct -> Gyro_Final = 0; } /** ****************************************************************************** * @file void Kalman_Filter(float Accel, float Gyro ,KalmanCountData * Kalman_Struct) * @author willieon * @version V0.1 * @date January-2015 * @brief 卡尔曼滤波计算 * * ****************************************************************************** * @attention * Accel:加速度计数据处理后进来的角度值 * Gyro :陀螺仪数据处理后进来的角速度值 * Kalman_Struct:递推运算所需要的中间变量,由用户定义为全局结构体变量 * Kalman_Struct -> Angle_Final 为滤波后角度最优值 * Kalman_Struct -> Gyro_Final 为后验角度值 ****************************************************************************** */ void Kalman_Filter(float Accel, float Gyro ,KalmanCountData * Kalman_Struct) { //陀螺仪积分角度(先验估计) Kalman_Struct -> Angle_Final += (Gyro - Kalman_Struct -> Q_bias) * dt; //先验估计误差协方差的微分 Kalman_Struct -> Pdot[0] = Q_angle - Kalman_Struct -> PP[0][1] - Kalman_Struct -> PP[1][0]; Kalman_Struct -> Pdot[1] = - Kalman_Struct -> PP[1][1]; Kalman_Struct -> Pdot[2] = - Kalman_Struct -> PP[1][1]; Kalman_Struct -> Pdot[3] = Q_gyro; //先验估计误差协方差的积分 Kalman_Struct -> PP[0][0] += Kalman_Struct -> Pdot[0] * dt; Kalman_Struct -> PP[0][1] += Kalman_Struct -> Pdot[1] * dt; Kalman_Struct -> PP[1][0] += Kalman_Struct -> Pdot[2] * dt; Kalman_Struct -> PP[1][1] += Kalman_Struct -> Pdot[3] * dt; //计算角度偏差 Kalman_Struct -> Angle_err = Accel - Kalman_Struct -> Angle_Final; //卡尔曼增益计算 Kalman_Struct -> PCt_0 = C_0 * Kalman_Struct -> PP[0][0]; Kalman_Struct -> PCt_1 = C_0 * Kalman_Struct -> PP[1][0]; Kalman_Struct -> E = R_angle + C_0 * Kalman_Struct -> PCt_0; Kalman_Struct -> K_0 = Kalman_Struct -> PCt_0 / Kalman_Struct -> E; Kalman_Struct -> K_1 = Kalman_Struct -> PCt_1 / Kalman_Struct -> E; //后验估计误差协方差计算 Kalman_Struct -> t_0 = Kalman_Struct -> PCt_0; Kalman_Struct -> t_1 = C_0 * Kalman_Struct -> PP[0][1]; Kalman_Struct -> PP[0][0] -= Kalman_Struct -> K_0 * Kalman_Struct -> t_0; Kalman_Struct -> PP[0][1] -= Kalman_Struct -> K_0 * Kalman_Struct -> t_1; Kalman_Struct -> PP[1][0] -= Kalman_Struct -> K_1 * Kalman_Struct -> t_0; Kalman_Struct -> PP[1][1] -= Kalman_Struct -> K_1 * Kalman_Struct -> t_1; Kalman_Struct -> Angle_Final += Kalman_Struct -> K_0 * Kalman_Struct -> Angle_err; //后验估计最优角度值 Kalman_Struct -> Q_bias += Kalman_Struct -> K_1 * Kalman_Struct -> Angle_err; //更新最优估计值的偏差 Kalman_Struct -> Gyro_Final = Gyro - Kalman_Struct -> Q_bias; //更新最优角速度值 } [/pre] 代码可以放在实际工程中使用,也可以用VS等C编译工具进行实验学习。在VS中的main()实例使用如下 [pre lang="C" line="1" file="main.c"] #include "kalman.h" #include "stdio.h" #include "stdlib.h" void main(void) { KalmanCountData k; //定义一个卡尔曼运算结构体 Kalman_Filter_Init(&k); //讲运算变量初始化 int m,n; for(int a = 0;a<80;a++) //测试80次 { //m,n为1到100的随机数 m = 1+ rand() %100; n = 1+ rand() %100; //卡尔曼滤波,传递2个测量值以及运算结构体 Kalman_Filter((float)m,(float)n,&k); //打印结果 printf("%d and %d is %f - %f\r\n",m,n,k.Angle_Final,k.K_0); } } [/pre] |
平衡小车卡尔曼滤波算法
news/2025/3/19 16:05:22/
相关文章

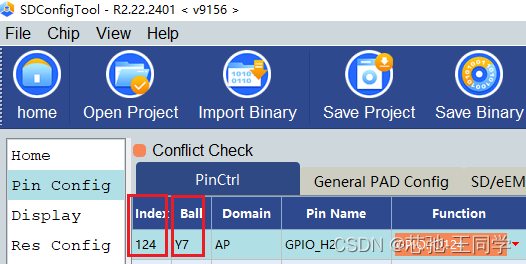
芯弛V9 GPIO配置
这篇文章主要分享给没接触过芯弛芯片的同学们,以往做项目的经验,接触一个新的芯片平台,大家通常喜欢通过设置GPIO来评估下新平台的设置使用习惯,芯弛的芯片上手还是非常快的。
以AP域GPIO配置为例:
打开SDToolBox&am…

Verilog 乘法器
30那个地方改仿真的时长,默认是10us(但实际上好像是1us) 这里改成30us //加载被乘数,运算时每次左移一位 (这里把被乘数位拓展了) reg [63:0] multiplicand //加载乘数,运算时每次右移一位…

OpenFOAM v9 postProcessing
1.1 fields场计算
age:求解输运方程,以确定粒子从入口对流到流中位置所需的时间。components:写入场(例如U)的分量(例如Ux,Uy,Uz)。CourantNo:从通量场计算库朗数。ddt:计算场的欧拉时间导数。…

Ferrari(法拉利)历代车型
Ferrari历代车型(全部配图) <content></content> 1947 125 S 1947 159 S 1948 166 INTER 1950 195 S 1951 340 AMERICA 1952 250 S

【C/C++】回调函数
1. 概念
回调函数是一种在程序运行期间通过函数指针调用的函数,它通常用于实现事件驱动、异步通信、消息传递等功能。
在回调函数的使用中,当某些事件发生时,系统会调用预先注册好的回调函数,将事件相关的数据传递给回调函数&am…
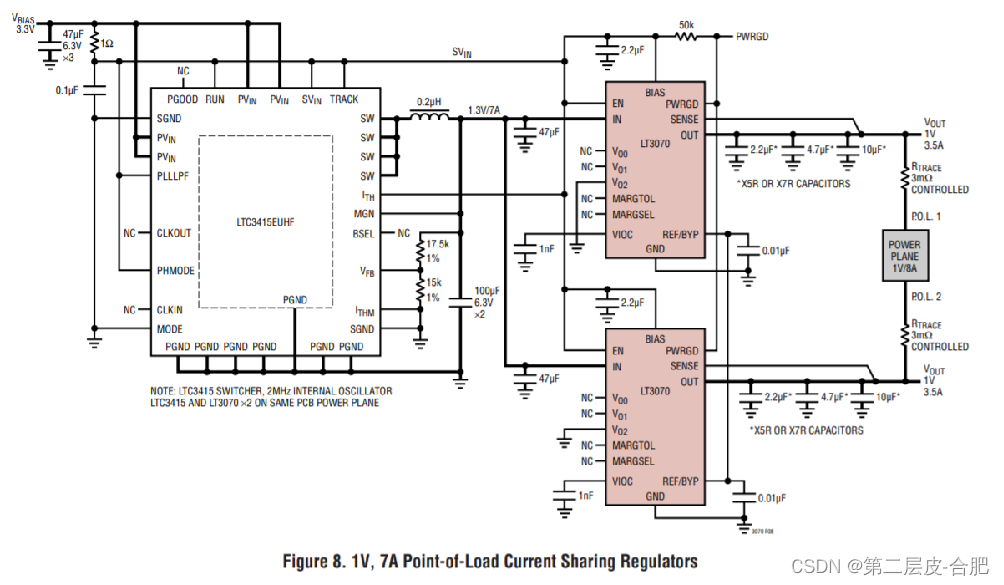
硬件设计电源系列文章-LDO设计
文章目录 概要整体架构流程技术名词解释技术细节小结 概要
本文主要分享LDO的相关设计,尤其是LDO的并联设计
整体架构流程
提示:这里可以添加技术整体架构
主要是讲述LDO的并联;并联以增加输出驱动能力,其具体框架如下&#x…