cv2.drawContours()函数的功能是绘制轮廓,输入变量如下:
cv2.drawContours(image, contours, contourIdx, color, thickness=None, lineType=None, hierarchy=None, maxLevel=None, offset=None)
第一个参数image表示目标图像,
第二个参数contours表示输入的轮廓组,每一组轮廓由点vector构成,
第三个参数contourIdx指明画第几个轮廓,如果该参数为负值,则画全部轮廓,
第四个参数color为轮廓的颜色,
第五个参数thickness为轮廓的线宽,如果为负值或CV_FILLED表示填充轮廓内部,
第六个参数lineType为线型,
第七个参数为轮廓结构信息,
第八个参数为maxLevel
一般用该函数前需要使用cv2.fineContours()先寻找外轮廓,函数输入变量如下:contours, hierarchy
image:参数是寻找轮廓的图像;
mode:参数表示轮廓的检索模式,有四种(本文介绍的都是新的cv2接口):
cv2.RETR_EXTERNAL:表示只检测外轮廓
cv2.RETR_LIST:检测的轮廓不建立等级关系
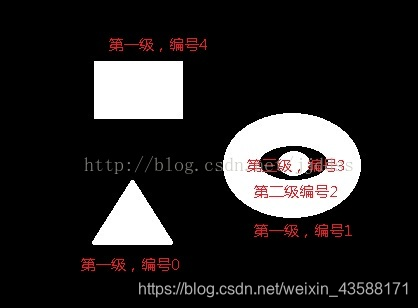
cv2.RETR_CCOMP:建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。
cv2.RETR_TREE:建立一个等级树结构的轮廓。
method:轮廓的近似办法:
cv2.CHAIN_APPROX_NONE:存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))==1
cv2.CHAIN_APPROX_SIMPLE:压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息
cv2.CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS:使用teh-Chinl chain近似算法
返回值:
contour:轮廓本身
hierarchy:每条轮廓对应的属性,其中的元素个数和轮廓个数相同,每个轮廓contours[i]对应4个hierarchy元素hierarchy[i][0] ~hierarchy[i][3],分别表示后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号,如果没有对应项,则该值为负数。
注意:cv2.findContours()函数接受的参数为二值图,即黑白的(不是灰度图),所以读取的图像要先转成灰度的,再转成二值图。
import cv2 as cv
mask1 = image.copy()
mask2 = image.copy()
area = []
#灰度化并直方图均衡化
equalHist = EqualHist(image)
#中值滤波
src_gray = cv.blur(equalHist, (5,5))
#canny边缘检测
canny_output = cv.Canny(src_gray, 0,130)
#二值化
ret, binary = cv.threshold(canny_output,0,130,cv.THRESH_BINARY | cv.THRESH_OTSU)
#形态学变换
kernel = cv.getStructuringElement(cv.MORPH_RECT, (5, 5)) # 矩形结构
close_img = cv.morphologyEx(binary, cv.MORPH_CLOSE, kernel, iterations=2)
#寻找外轮廓
contours, hierarchy = cv.findContours(close_img , cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
# 找到最大的轮廓
for k in range(len(contours)):
area.append(cv.contourArea(contours[k]))
max_idx = np.argmax(np.array(area)) #用于返回一个numpy数组中最大值的索引值
#最大轮廓面积计算
area_black = cv.contourArea(contours[max_idx])
# Draw contours
result=cv.drawContours(mask1, contours,max_idx, (0,255,0), 3)
cv.imshow("",result)
cv2.boundingRect(img) 矩形边框(Bounding Rectangle)是说,用一个最小的矩形,把找到的形状包起来。
这个函数很简单,img是一个二值图,也就是它的参数;
返回四个值,分别是x,y,w,h;
x,y是矩阵左上点的坐标,w,h是矩阵的宽和高
然后利用cv2.rectangle(img, (x,y), (x+w,y+h), (0,255,0), 2)画出矩形
参数解释
第一个参数:img是原图
第二个参数:(x,y)是矩阵的左上点坐标
第三个参数:(x+w,y+h)是矩阵的右下点坐标
第四个参数:(0,255,0)是画线对应的rgb颜色
第五个参数:2是所画的线的宽度