cv2 绘制轮廓
- cv2.findContours()
- 注意事项
- mode参数
- method参数
- offset:(可选参数)
- 返回值
cv2.findContours()
def findContours(image, mode, method, contours=None, hierarchy=None, offset=None):
# real signature unknown; restored from __doc__"""findContours(image, mode, method[, contours[, hierarchy[, offset]]]) -> contours, hierarchy. @brief Finds contours in a binary image.. . The function retrieves contours from the binary image using the algorithm @cite Suzuki85 . The contours. are a useful tool for shape analysis and object detection and recognition. See squares.cpp in the. OpenCV sample directory.. @note Since opencv 3.2 source image is not modified by this function.. . @param image Source, an 8-bit single-channel image. Non-zero pixels are treated as 1's. Zero. pixels remain 0's, so the image is treated as binary . You can use #compare, #inRange, #threshold ,. #adaptiveThreshold, #Canny, and others to create a binary image out of a grayscale or color one.. If mode equals to #RETR_CCOMP or #RETR_FLOODFILL, the input can also be a 32-bit integer image of labels (CV_32SC1).. @param contours Detected contours. Each contour is stored as a vector of points (e.g.. std::vector<std::vector<cv::Point> >).. @param hierarchy Optional output vector (e.g. std::vector<cv::Vec4i>), containing information about the image topology. It has. as many elements as the number of contours. For each i-th contour contours[i], the elements. hierarchy[i][0] , hierarchy[i][1] , hierarchy[i][2] , and hierarchy[i][3] are set to 0-based indices. in contours of the next and previous contours at the same hierarchical level, the first child. contour and the parent contour, respectively. If for the contour i there are no next, previous,. parent, or nested contours, the corresponding elements of hierarchy[i] will be negative.. @param mode Contour retrieval mode, see #RetrievalModes. @param method Contour approximation method, see #ContourApproximationModes. @param offset Optional offset by which every contour point is shifted. This is useful if the. contours are extracted from the image ROI and then they should be analyzed in the whole image. context."""pass
注意事项
1.输入为二值图像,黑色为背景,白色为目标
2.该函数会修改原图像,因此若想保留原图像在,则需拷贝一份,在拷贝图里修改。
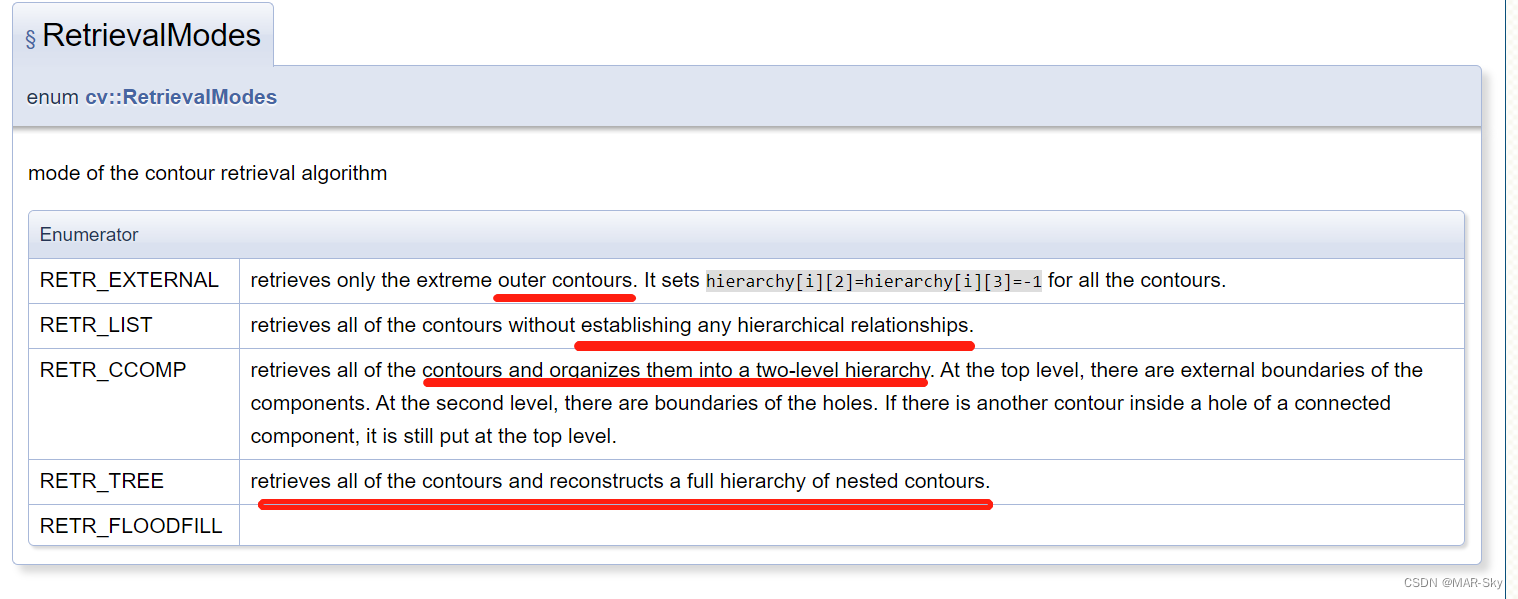
mode参数
| 参数名称 | 功能 |
|---|---|
| cv2.RETR_EXTERNAL | 只检测外轮廓 |
| cv2.RETR_LIST | 检测的轮廓不建立等级关系,都是同级 |
| cv2.RETR_CCOMP | 建立两个等级的轮廓,上面一层为外边界,里面一层为内孔的边界信息 |
| cv2.RETR_TREE | 建立一个等级树结构的轮廓 |
method参数
| 参数名称 | 功能 |
|---|---|
| cv2.CHAIN_APPROX_NONE | 存储所有边界点 |
| cv2.CHAIN_APPROX_SIMPLE | 压缩垂直、水平、对角方向,只保留端点 |
| cv2.CHAIN_APPROX_TX89_L1 | 使用teh-Chini近似算法 |
| cv2.CHAIN_APPROX_TC89_KCOS | 使用teh-Chini近似算法 |
offset:(可选参数)
offset:轮廓点的偏移量,格式为tuple,如(-10,10)表示轮廓点沿X负方向偏移10个像素点,沿Y正方向偏移10个像素点
返回值
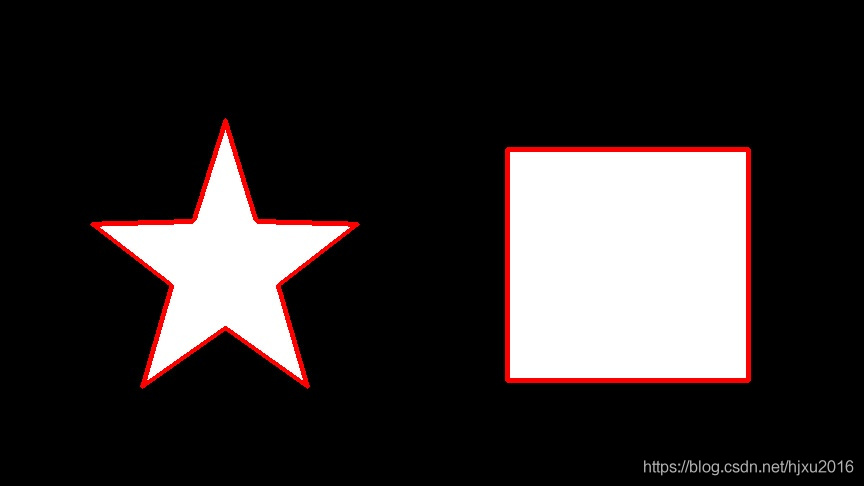
contours:轮廓点。列表格式,每一个元素为一个3维数组(其形状为(n,1,2),其中n表示轮廓点个数,2表示像素点坐标),表示一个轮廓
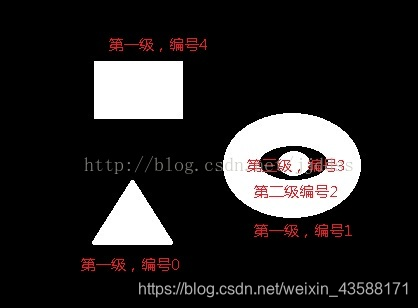
hierarchy:轮廓间的层次关系,为三维数组,形状为(1,n,4),其中n表示轮廓总个数,4指的是用4个数表示各轮廓间的相互关系。第一个数表示同级轮廓的下一个轮廓编号,第二个数表示同级轮廓的上一个轮廓的编号,第三个数表示该轮廓下一级轮廓的编号,第四个数表示该轮廓的上一级轮廓的编号。
# ## -*- coding: utf-8 -*-
import cv2
import imutils
import numpy as npdef RGB_GRAY(img):img = cv2.resize(img, (640, 480))gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)gray = cv2.bilateralFilter(gray, 13, 15, 15)return img, graydef edge(img):# cv2.Canny(source_image,thresholdValue 1,thresholdValue 2)edged = cv2.Canny(img, 30, 200)cv2.imshow('img', edged)cv2.waitKey(0)contours = cv2.findContours(edged.copy(), cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)contours = imutils.grab_contours(contours)contours = sorted(contours, key=cv2.contourArea, reverse=True)[:10]return contoursdef solve(img):img, gray = RGB_GRAY(img)contours = edge(gray)if __name__ == '__main__':img_path = './22222.jpg'img = cv2.imread(img_path)solve(img)