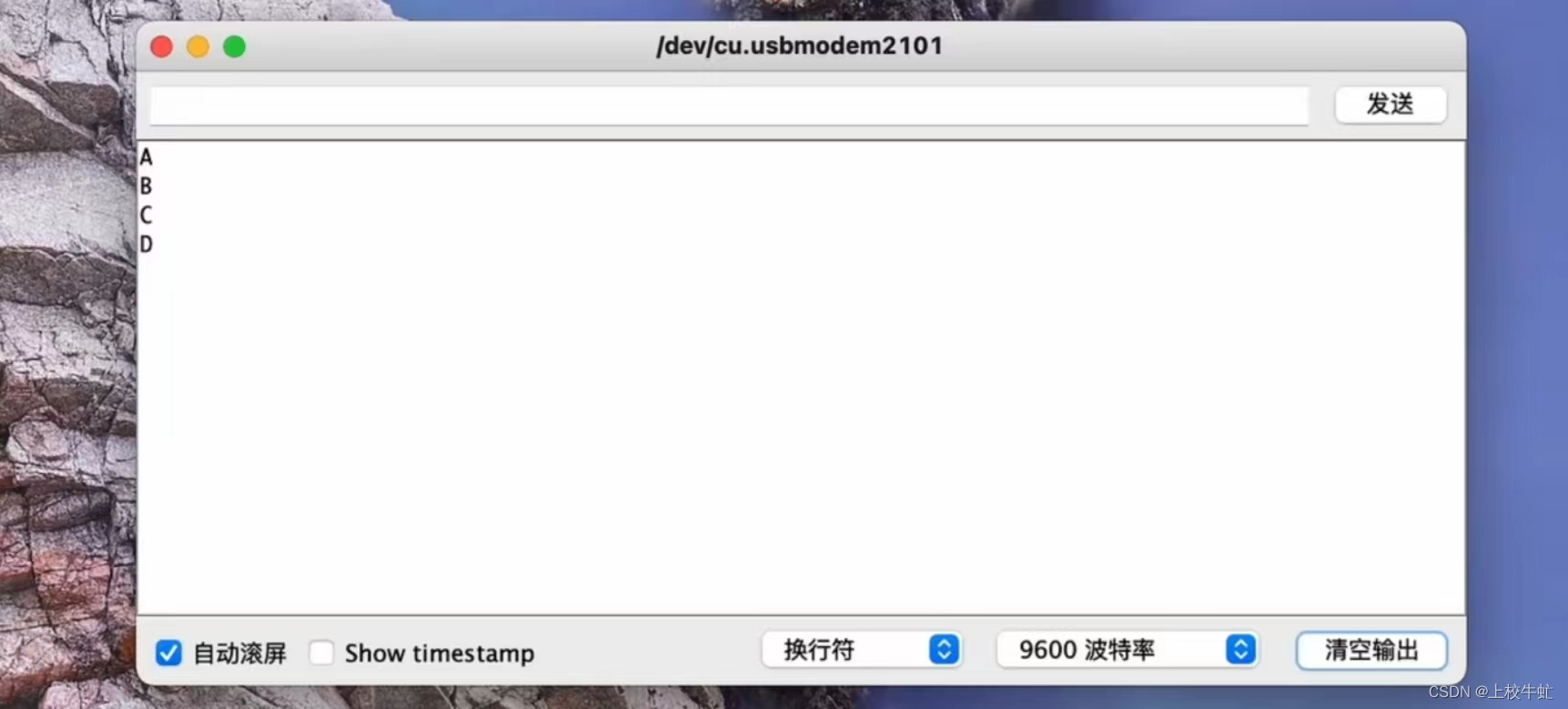
上图是电脑收到来自微控制器经过串口发送的信息, 那么电脑是如何收到这些数据的呢?
任何一种通信都要包括硬件物理接口和软件通信协议。
串口通信物理接口如下图:
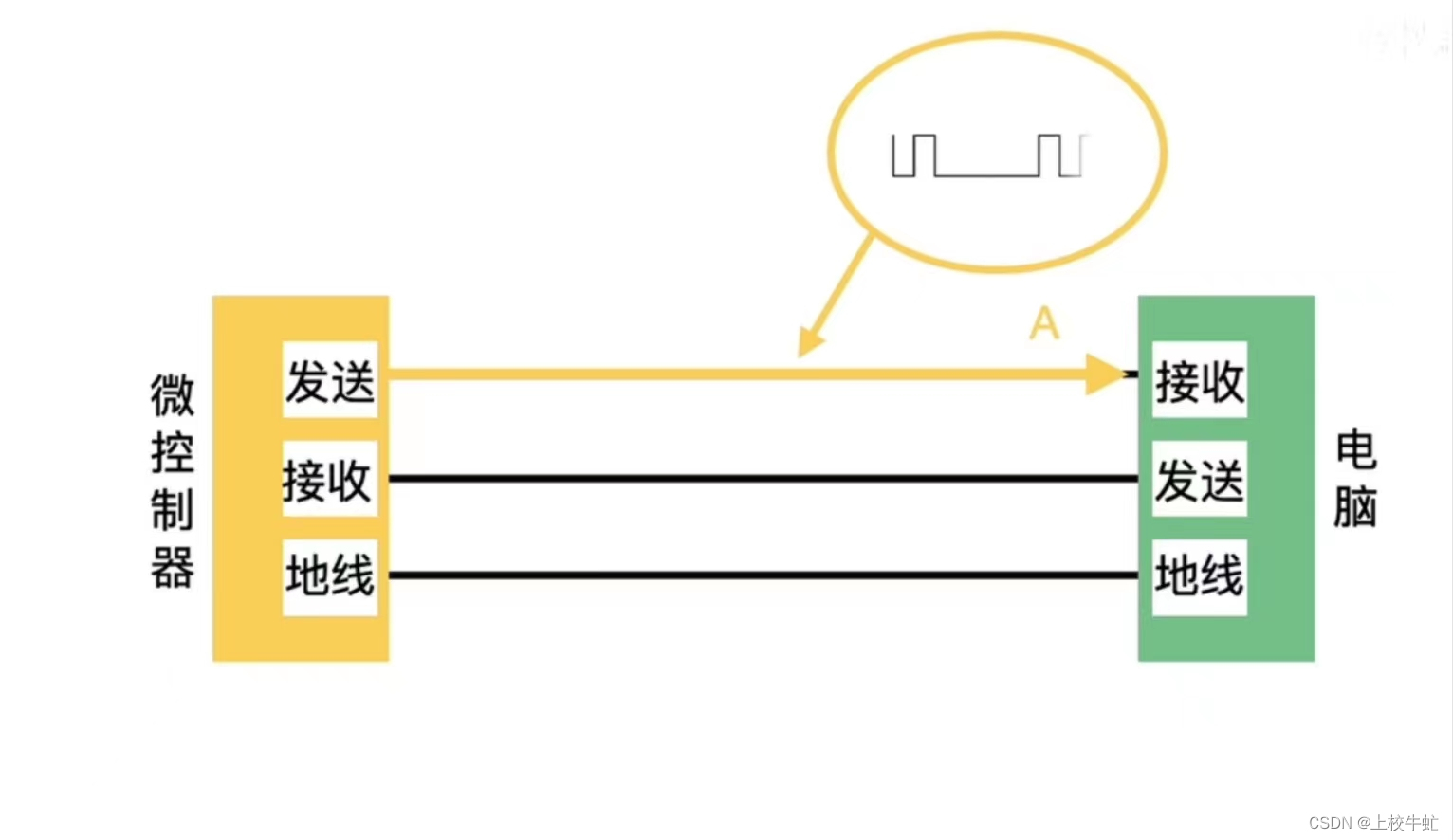
微控制器与电脑的通信仅需1根数据线将数据一位一位按顺序发送,称为串口通信协议。通过波形测试,我们可以看到发送端的数据线的波形是矩阵脉冲。
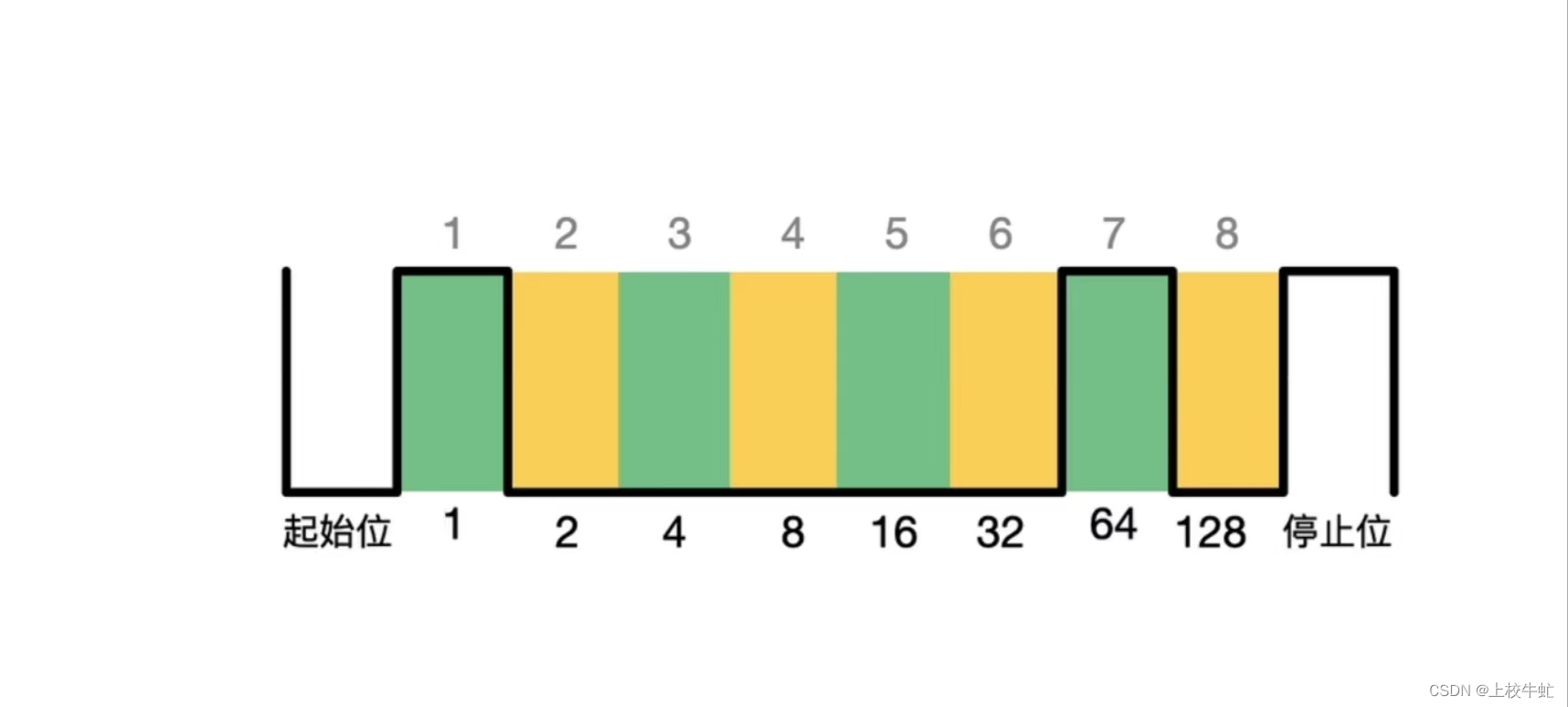
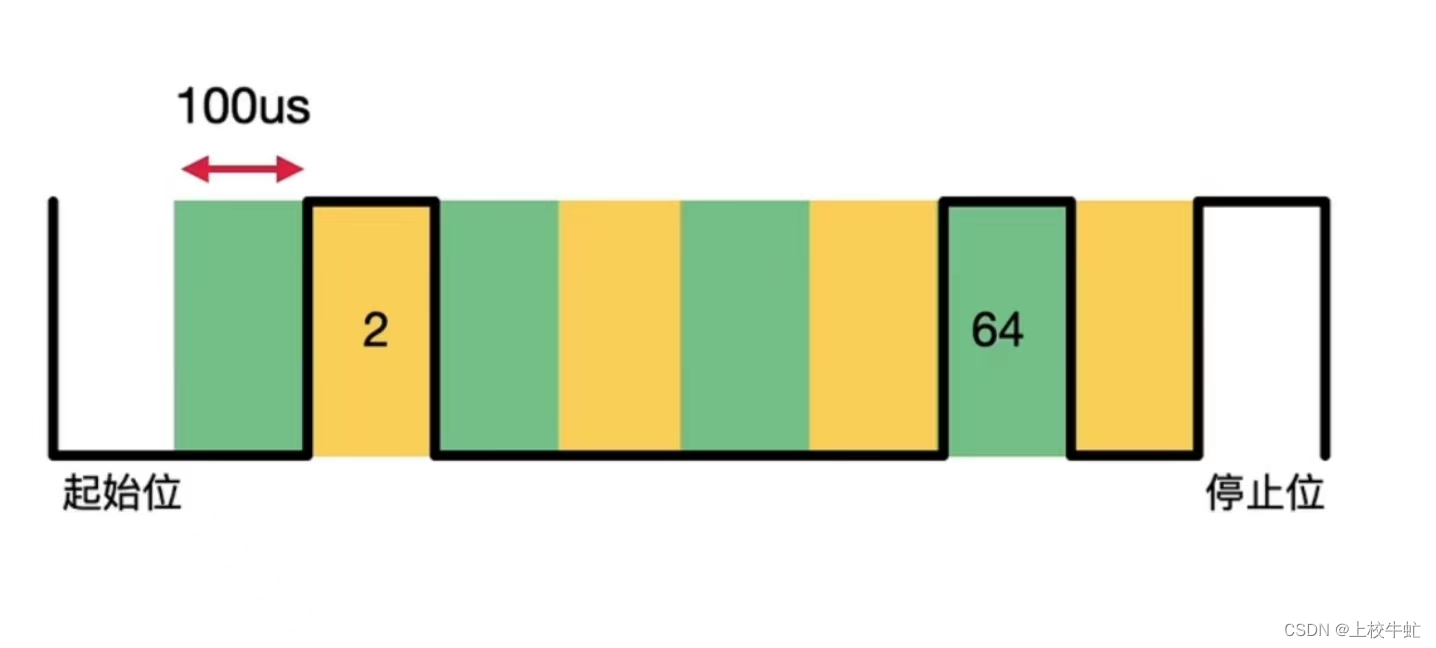
上图是一帧完整的串行通信数据,它一共有10位,并从左往右依次把数据给发送出去。起始位永远是低电平,停止位永远是高电平,中间的是8位二进制数据。按照这种规则,我们把图中处于高电平状态的数据位相加得到65,从ASCII码表中查到65对应的就是A(如下图)
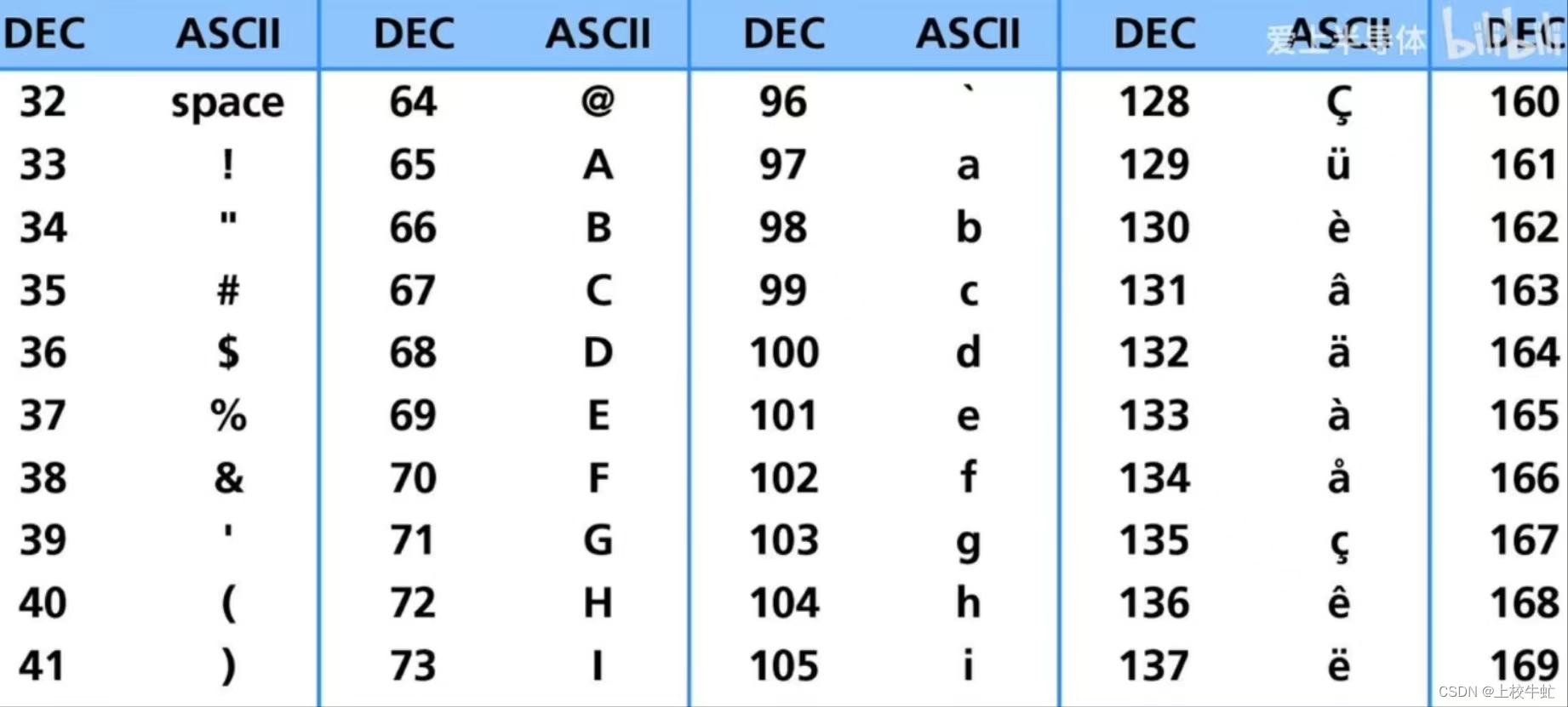
因此,我们想发送什么数据,就按照ASCII表上的值让微控制器去发送高低电平就可以了。
那么波特率在串口通信中有啥作用呢,可不可以随意设置波特率呢?
在发送数据的同时必须要有时间间隔。这里的时间间隔就得看串口通信的波特率了。在第一章图中,我们使用的波特率为9600/s,也就是1每位数据之间的间隔约为100us。
即每隔100us,微控制器向电脑发送一次高低电平(比如微控制器发送65,电脑收到的就是A)。如果想要使数据更快的发送,可以选择更高的波特率,比如115200/s(即发送时间间隔为8.7us)。
但是我们在编程时设置的串口发送时间间隔必须要和波特率严格对应上,若对应不上,则会出现下图情况。
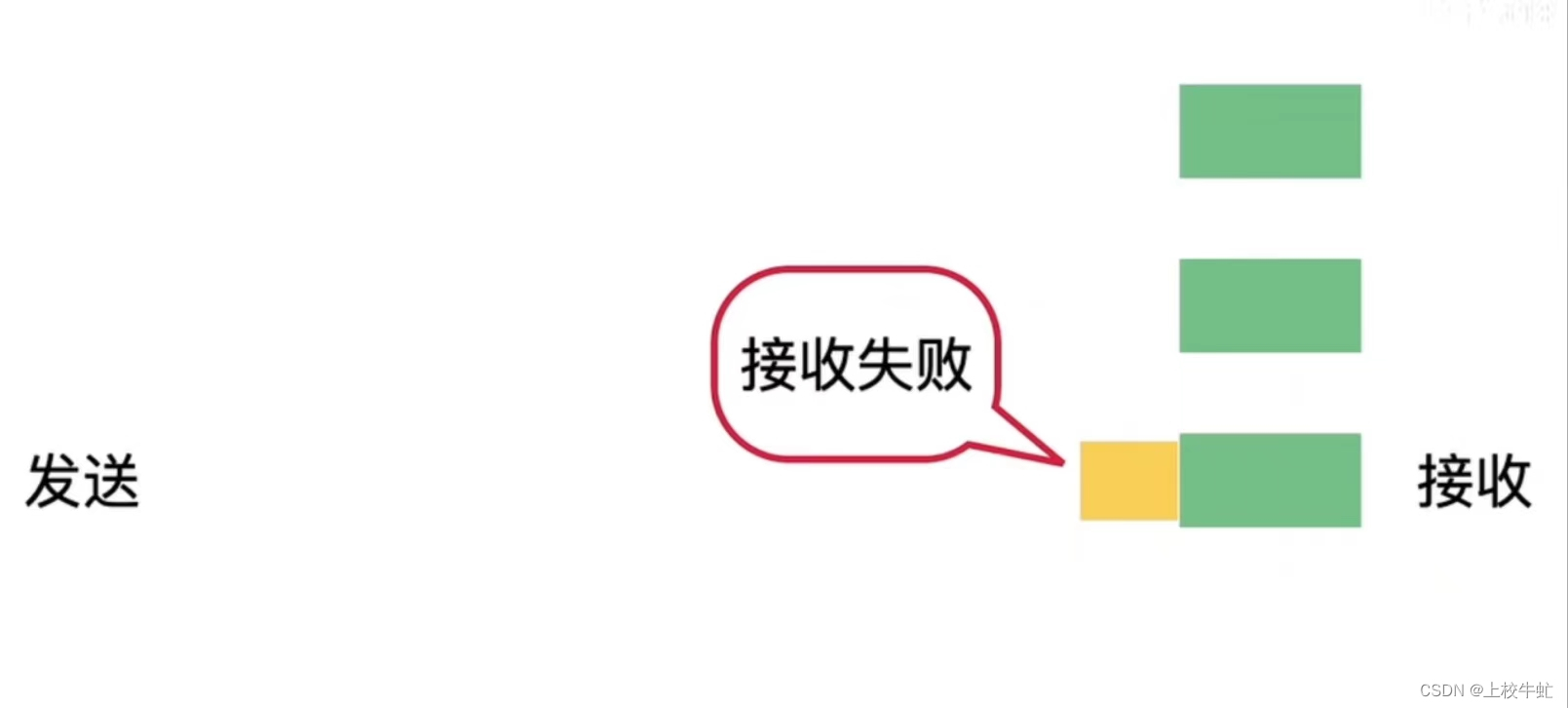
即当我们将数据发送过去,接收方可能已经过了接收时间,可能导致数据错乱。
以上就是串口发送数据的底层原理。
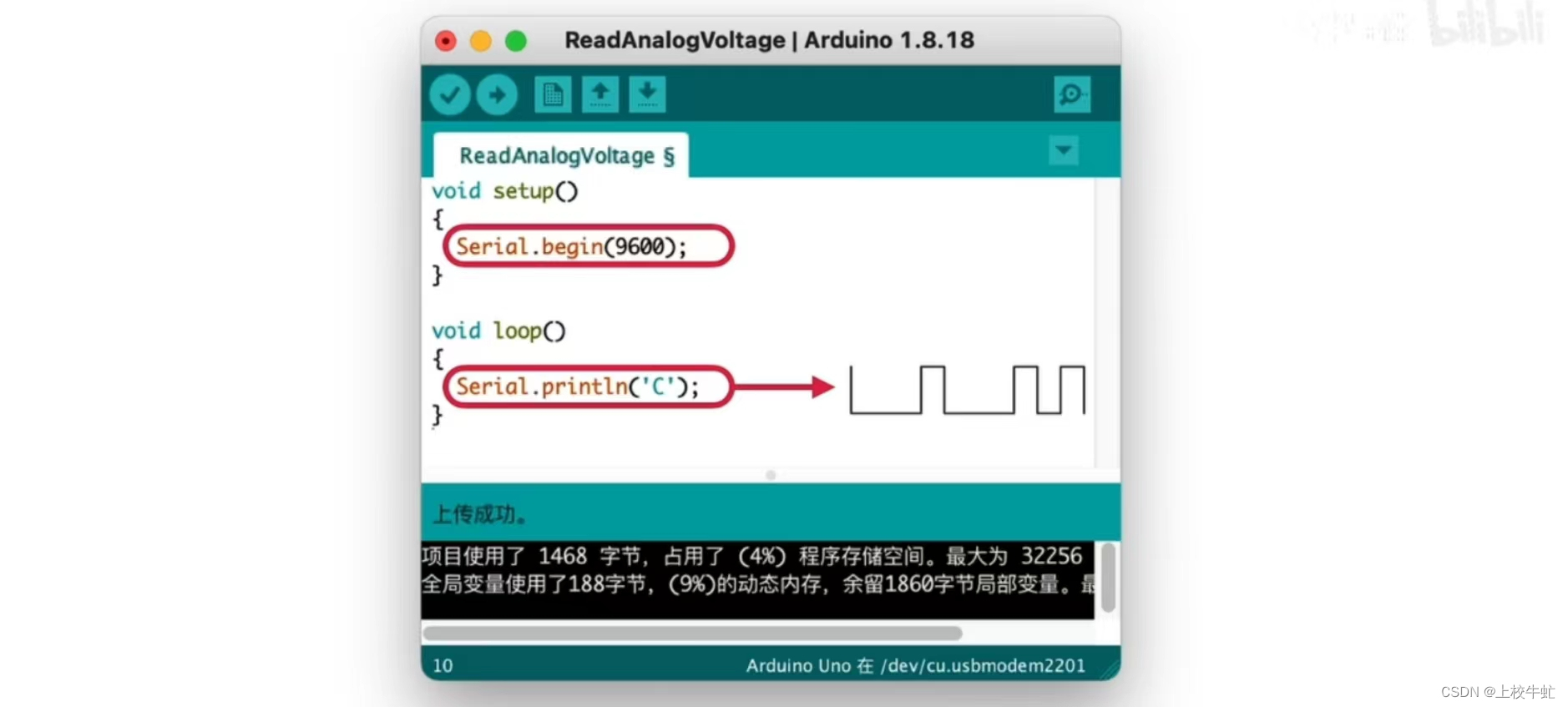
但是我们用串口发送数据时,不需要向上面设置的那么繁琐。以Arduino为例,在程序的最开头设置好波特率,然后直接把C用这个函数发送出去,无需我们设置时间间隔,也无需按照ASCII表像刚才那样一位一位的去发送数据,但该函数底层编程是按照这种思想编写代码,我们只需调用相关库文件和函数即可。
图片来自B站UP:爱上半导体
【超简单的串口通信的工作原理】
news/2024/11/22 16:50:29/
相关文章
![[转]乔布斯的脑子在想什么?](http://apple4.us/assets_c/2008/07/inside%20steve%27s%20brain-thumb-150x224.jpg)
[转]乔布斯的脑子在想什么?
[摘译] 史蒂夫乔布斯的脑子里在想什么 黄继新 on 2008-07-10,22:33 评论(15) edit 本文摘译自 Wired.com(Wired 杂志网络版)的执行主编 Leander Kahney 于今年上半年出版的《Inside Steves Brain》一书。刊发在了《环球企业家》杂志7月5日出版的15周年特…

史蒂夫·乔布斯的脑子里在想什么
本文摘译自 Wired.com(Wired 杂志网络版)的执行主编 Leander Kahney 于今年上半年出版的《Inside Steves Brain》一书。刊发在了《环球企业家》杂志7月5日出版的15周年特刊上,我们试图通过 Kahney 描绘的这些片段,来了解乔布斯究竟…
苹果CEO 斯蒂夫.乔布斯:我如何工作
“真是一群白痴”当时在苹果负责MacOS人机界面设计小组的柯戴尔瑞茨拉夫(CordellRatzlaff)认为,将丑陋的旧界面装在优雅的新系统上简直是个耻辱, 于是他很快便让手下的设计师做出了一套新界面的设计方案,新界面尤其发挥…
转:向乔布斯学习设计理念与用户体验
本文摘译自 Wired.com(Wired 杂志网络版)的执行主编 Leander Kahney 于今年上半年出版的《Inside Steves Brain》一书。刊发在了《环球企业家》杂志7月5日出版的 15周年特刊上,我们试图通过 Kahney 描绘的这些片段,来了解乔布斯究…

苹果乔布斯:我如何工作.
“你们就是设计MacOS的人吧?”乔布斯问道,他们怯怯地点头说是。“好嘛,真是一群白痴。” 没错,这是乔布斯当初对设计MacOS的团队的评价。在乔布斯看来,少即是多。“苹果的核心优势就是知道如何让复杂的高科技为普罗大众…

计算机各个组成部分介绍
文章来自于:http://baike.baidu.com/view/25278.htm CPU
简介 CPU(Central Processing Unit,
中央处理器)是计算机最重要的部件之一。是一台电脑的核心,相当于人的大脑,它的内部结构分为控制单元、逻辑单元和
存储单元三大部分。目前C…
【那些年学过的计算机基础】--计算机发展史(图片版)
计算机发展史
(内容来源于网络,本文将对计算机发展大事件进行持续完善和更新) 一、史前时代【1623——1895】
1623年:德国科学家契克卡德(W. Schickard)制造了人类有史以来第一台机械计算机,…