欢迎关注我的CSDN:https://spike.blog.csdn.net/
本文地址:https://blog.csdn.net/caroline_wendy/article/details/131097165
马尔可夫决策过程(Markov Decision Process,MDP)和马尔可夫奖励过程(Markov Reward Process,MRP)之间存在一种转换关系。下面我将详细介绍这个转换过程。
马尔可夫决策过程(MDP)是一种数学模型,用于描述一个决策过程中的随机性和不确定性。MDP由5个元素组成:状态集合(S),动作集合(A),状态转移概率函数(P),奖励函数(R),以及折扣因子(γ)。
然而,马尔可夫决策过程并不直接包含奖励信息,而是通过引入马尔可夫奖励过程(MRP)来处理奖励。马尔可夫奖励过程是马尔可夫决策过程的一个子集,不包含动作集合和策略。
下面是将MDP转换为MRP的步骤:
- 状态集合(S)和动作集合(A)不变:在转换过程中,状态集合和动作集合保持不变。
- 状态转移概率函数(P):对于每个状态 s 和动作 a 的组合,计算该组合下的状态转移概率。这可以通过对所有可能的下一个状态 s’ 的概率进行求和来完成。即对于每个 s 和 a,计算 P(s’|s, a)。
- 奖励函数(R):为每个状态 s 和动作 a 的组合计算奖励。这可以通过对所有可能的下一个状态 s’ 的奖励进行加权平均来完成。即对于每个 s 和 a,计算 R(s, a, s’) = Σ P(s’|s, a) * R(s, a, s’)。
- 折扣因子(γ):将原始MDP中的折扣因子 γ 保持不变。
经过这个转换过程,我们从MDP转换为了MRP,即马尔可夫奖励过程。在MRP中,我们不再考虑动作和策略,而是仅关注状态转移概率和奖励函数。这使得我们可以更加专注于对奖励过程的建模和分析。
需要注意的是,从MRP转换回MDP是不可能的,因为MRP中没有动作和策略的概念。因此,从MDP到MRP的转换是可逆的,但反过来是不可逆的。
马尔可夫决策过程(Markov Decision Process,MDP),在马尔可夫奖励过程(Markov Reward Process,MRP)的基础上,引入动作(Action),即 < S , A , P , r , γ > <\mathcal{S},\mathcal{A},\mathcal{P},r,\gamma> <S,A,P,r,γ>。
即引入动作集合 A \mathcal{A} A,奖励reward由 r ( s ) r(s) r(s) 转换为 r ( s , a ) r(s,a) r(s,a) ,状态转移概率由 P ( s ′ ∣ s ) \mathcal{P}(s'|s) P(s′∣s) 转换为 P ( s ′ ∣ s , a ) \mathcal{P}(s'|s,a) P(s′∣s,a),都增加动作 a a a。同时,引入策略 π \pi π 的概念。
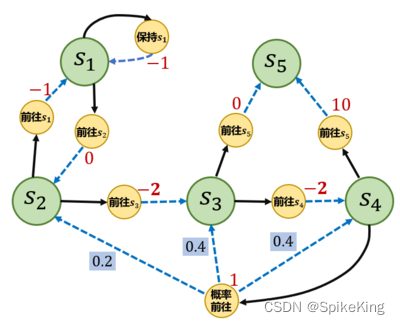
策略 π \pi π 包括2类,确定性策略(Deterministic Policy)和随机性策略(Stochastic Policy)。确定性策略即状态转移链,即一个状态确定到另一个状态,也可以理解为概率为1,其他都是0。随机性策略即状态转移概率,即状态 s 1 s_{1} s1 到 [ s 1 , s 2 , s 3 , . . . ] [s_{1}, s_{2}, s_{3},...] [s1,s2,s3,...]的概率,更为普适。
马尔可夫决策过程( < S , A , P , r , γ > <\mathcal{S},\mathcal{A},\mathcal{P},r,\gamma> <S,A,P,r,γ>) + 策略 π \pi π = 马尔可夫奖励过程( < S , P , r , γ > <\mathcal{S},\mathcal{P},r,\gamma> <S,P,r,γ>)
MRP的状态转移概率矩阵,转换公式如下:
P ( s ′ ∣ s ) = ∑ a ∈ A π ( a ∣ s ) P ( s ′ ∣ s , a ) P(s'|s)=\sum_{a\in A} \ \pi(a|s) \ P(s'|s,a) P(s′∣s)=a∈A∑ π(a∣s) P(s′∣s,a)
MRP的状态奖励列表,转换公式如下:
r ′ ( s ) = ∑ a ∈ A π ( a ∣ s ) r ( s , a ) r'(s)=\sum_{a\in A} \ \pi(a|s) \ r(s,a) r′(s)=a∈A∑ π(a∣s) r(s,a)
这样,就可以使用 MRP 的贝尔曼方程(Bellman Equation),计算 MDP 的在策略 π \pi π 状态价值 V π ( s ′ ) V^{\pi}(s') Vπ(s′),贝尔曼方程(Bellman Equation)如下:
V = R + γ P V V = ( I − γ P ) − 1 R \mathcal{V} = \mathcal{R} + \gamma \mathcal{P} \mathcal{V} \\ \mathcal{V} = (\mathcal{I}-\gamma \mathcal{P})^{-1} \mathcal{R} V=R+γPVV=(I−γP)−1R
有了状态价值 V π ( s ′ ) V^{\pi}(s') Vπ(s′),即可以计算动作价值 Q π ( s , a ) Q^{\pi}(s,a) Qπ(s,a),即在状态 s s s 时,执行 a a a 动作的价值,在某个状态,尽量使用价值最高的动作,类似自动驾驶中,碰见某类情况,使用最优的动作进行处理,因为动作价值最高。
Q π ( s , a ) = r ( s , a ) + γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V π ( s ′ ) Q^{\pi}(s,a)=r(s,a) + \gamma \sum_{s' \in S}P(s'|s,a)V^{\pi}(s') Qπ(s,a)=r(s,a)+γs′∈S∑P(s′∣s,a)Vπ(s′)
示例如下:
源码如下:
#!/usr/bin/env python
# -- coding: utf-8 --
"""
Copyright (c) 2022. All rights reserved.
Created by C. L. Wang on 2023/6/7
"""import numpy as npdef compute(P, rewards, gamma, states_num):"""利用 贝尔曼方程 解析状态价值"""rewards = np.array(rewards).reshape((-1, 1)) # 转换成列向量value = np.dot(np.linalg.inv(np.eye(states_num, states_num) - gamma * P), rewards)return valuedef main():S = ["s1", "s2", "s3", "s4", "s5"] # 状态集合A = ["保持s1", "前往s1", "前往s2", "前往s3", "前往s4", "前往s5", "概率前往"] # 动作集合# 状态转移函数P = {"s1-保持s1-s1": 1.0,"s1-前往s2-s2": 1.0,"s2-前往s1-s1": 1.0,"s2-前往s3-s3": 1.0,"s3-前往s4-s4": 1.0,"s3-前往s5-s5": 1.0,"s4-前往s5-s5": 1.0,"s4-概率前往-s2": 0.2,"s4-概率前往-s3": 0.4,"s4-概率前往-s4": 0.4,}# 奖励函数R = {"s1-保持s1": -1,"s1-前往s2": 0,"s2-前往s1": -1,"s2-前往s3": -2,"s3-前往s4": -2,"s3-前往s5": 0,"s4-前往s5": 10,"s4-概率前往": 1,}gamma = 0.5 # 折扣因子MDP = (S, A, P, R, gamma)# 策略1,随机策略Pi_1 = {"s1-保持s1": 0.5,"s1-前往s2": 0.5,"s2-前往s1": 0.5,"s2-前往s3": 0.5,"s3-前往s4": 0.5,"s3-前往s5": 0.5,"s4-前往s5": 0.5,"s4-概率前往": 0.5,}# 策略2Pi_2 = {"s1-保持s1": 0.6,"s1-前往s2": 0.4,"s2-前往s1": 0.3,"s2-前往s3": 0.7,"s3-前往s4": 0.5,"s3-前往s5": 0.5,"s4-前往s5": 0.1,"s4-概率前往": 0.9,}# 把输入的两个字符串通过“-”连接,便于使用上述定义的P、R变量def join(str1, str2):return str1 + '-' + str2# 策略1,随机策略# 第1行: "s1-s1": 0.5, "s1-s2": 0.5# 第2行: "s2-s1": 0.5, "s2-s3": 0.5# 第3行: "s3-s4": 0.5, "s3-s5": 0.5# 第4行:"s4-s5": 0.5, "s4-概率前往": 0.5 * ["s4-概率前往-s2": 0.2, "s4-概率前往-s3": 0.4, "s4-概率前往-s4": 0.4]# 第5行:终点P_from_mdp_to_mrp = [[0.5, 0.5, 0.0, 0.0, 0.0],[0.5, 0.0, 0.5, 0.0, 0.0],[0.0, 0.0, 0.0, 0.5, 0.5],[0.0, 0.1, 0.2, 0.2, 0.5],[0.0, 0.0, 0.0, 0.0, 1.0],]P_from_mdp_to_mrp = np.array(P_from_mdp_to_mrp)# R奖励:# 第1个值: 0.5 * -1 + 0.5 * 0 = -0.5# 第2个值:0.5 * -1 + 0.5 * -2 = -1.5# 第3个值:0.5 * -2 + 0.5 * 0 = -1.0# 第4个值:0.5 * 10 + 1 * 0.5 = 5.5# 第5个值:final = 0R_from_mdp_to_mrp = [-0.5, -1.5, -1.0, 5.5, 0]V = compute(P_from_mdp_to_mrp, R_from_mdp_to_mrp, gamma, 5)print("MDP中每个状态价值分别为\n", V)if __name__ == '__main__':main()
输出 s 1 ∼ s 6 s_{1} \sim s_{6} s1∼s6 的状态价值 V π ( s ′ ) V^{\pi}(s') Vπ(s′) 如下:
[[-1.22555411][-1.67666232][ 0.51890482][ 6.0756193 ][ 0. ]]
状态动作价值 Q π ( s 4 , 概率前往 ) Q^{\pi} (s_{4},概率前往) Qπ(s4,概率前往) 是:
Q π ( s , a ) = r ( s , a ) + γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V π ( s ′ ) 2.152 = 1 + 0.5 ∗ [ 0.2 ∗ ( − 1.68 ) + 0.4 ∗ 0.52 + 0.4 ∗ 6.08 ] Q^{\pi}(s,a)=r(s,a) + \gamma \sum_{s' \in S}P(s'|s,a)V^{\pi}(s') \\ 2.152 = 1+0.5*[0.2*(-1.68)+0.4*0.52+0.4*6.08] Qπ(s,a)=r(s,a)+γs′∈S∑P(s′∣s,a)Vπ(s′)2.152=1+0.5∗[0.2∗(−1.68)+0.4∗0.52+0.4∗6.08]